基于IMFO算法的光伏高占比电网UPFC参数优化模型
2020-02-25张文朝孙骁强张立伟樊茂森
王 蒙,张文朝,孙骁强,张立伟,汪 莹,樊茂森
(1.国家电网公司西北分部,陕西 西安 710048;2.北京科东电力控制系统有限责任公司,北京 100089;3.华北电力大学 电气与电子工程学院,河北 保定 071003)
0 引言
在光伏占比较高的地区,日间光伏出力较大,电网呈外送特性,易发生暂态稳定问题;夜间光伏出力降为零,电网呈受端特性,负荷较重地区易发生暂态电压稳定问题。电网暂态稳定与电压安全协调优化己经成为限制电力高效传输的重要因素之一[1]~[4]。提高电网暂态稳定性的常用方法是优化机组PSS 参数,但机组之间关系复杂,实际操作存在一定难度。提高电压稳定性的办法通常是向系统进行无功补偿,然而传统机械式控制方法反应速度较慢,缺乏足够的控制能力,有明显的局限性[5]。UPFC 能够快速可靠地对系统进行动态潮流控制以及电压无功支撑,可增强系统阻尼,提高暂态电压水平,且具有较强的可控性[6]~[11]。针对UPFC在电力系统中的优化研究,文献[12]为消除输电瓶颈,优化电压水平,提出考虑UPFC 的潮流优化模型;文献[13]利用粒子群算法对MMC-UPFC 参数进行优化,提高系统运行稳定性;文献[14]为提高系统的暂态稳定性能,提出了基于遗传算法的UPFC 控制参数优化模型。现阶段已投运的UPFC工程主要有苏南工程、南京西环网工程、上海蕰藻浜工程等,但多数工程均以潮流及稳定性等单目标优化为主,综合考虑装置多种稳定协调控制的研究较少。
本文利用全局搜索与局部搜索兼顾的飞蛾扑火算法进行UPFC 参数优化,该算法在处理复杂约束以及搜索未知空间的优化过程中更具优势[15],[16]。针对算法存在的收敛性问题,本文将改进其种群初始化、飞行机制以及火焰熄灭规则,增加其算法的全局寻优能力,加快收敛速度,并通过MATLAB 和PSD-BPA 的联合仿真,验证本文所提方法能够有效提高UPFC 设备对电网的暂态电压支撑能力以及阻尼功率振荡的能力。
1 光伏高占比电力系统UPFC控制器设计
在图1 所示的UPFC 换流器控制系统中,VSC1 经过并联变压器Tsh向系统注入可控电压Ush∠θsh,对母线电压进行控制,VSC2 经过串联变压器 Tsc向系统注入可控电压 Usc∠θsc,对线路潮流进行控制。串并联系统相互协调可以实现调节输入点母线电压、 控制潮流及抑制动态干扰的目的。本文在机电仿真过程中使用PSD-BPA 嵌入的UPFC 控制模型,采用交叉解耦控制的方法。在串联控制模型中输入信号为线路功率的有功功率P 和无功功率Q,输出信号为VX和VY,控制线路潮流的有功功率与无功功率(图2)。在并联控制模型中输入信号为UPFC 的直流侧电压Vdc和并联母线的交流电压V,输出信号为IX和IY,维持母线电压的稳定与串联侧的有功功率平衡 (图3)。运用UPFC 的电压调节能力及移相功能来改善系统的电压稳定水平及暂态性。

图1 UPFC 换流器控制系统图Fig.1 UPFC converter control system diagram

图2 UPFC 串联系统控制模型Fig.2 UPFC series system control model
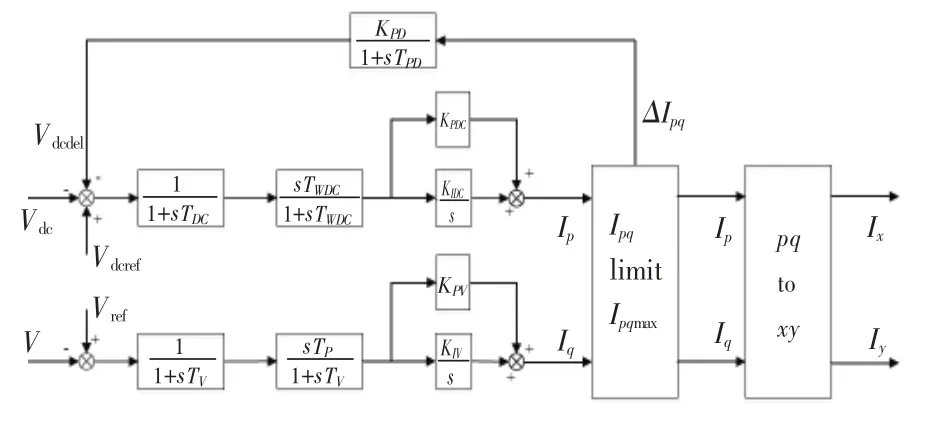
图3 UPFC 并联系统控制模型Fig.3 UPFC parallel system control model
UPFC 的功率响应能力能够有效抑制光伏高占比电网中由于日夜间功率的波动性而导致的暂态功角及电压稳定隐患。因此,本文采用针对暂态功角稳定性构建具有抑制作用的光伏高占比电网等效阻尼比最大为目标函数,则光伏高占比电网暂态功角稳定性能目标函数为

式中:ξ 为系统阻尼比,电网等效的动态阻尼比取值为0.05~1;J1为光伏高占比电网功角稳定性能。
光伏高占比电网的暂态电压稳定主要考虑电网暂态过程中关键节点的电压跌落以及电压水平。根据相关工程经验及行业标准,暂态电压跌落最小值为0.6 p.u.,故障切除后的电压水平应为0.8 p.u.以上。则光伏高占比电网暂态电压稳定性能目标函数为

式中:t0为故障结束时刻;td为仿真结束时刻;n为观测负荷节点个数;Vi(t)为 i 节点 t 时刻的电压幅值;Vi(0)为故障前电压;Vimin为 i 节点电压跌落最小值;w1,w2为权重系数,本文取 w1,w2为1/[n×(td-t0)]及 1。
该目标函数越小,系统暂态电压稳定性越好。优化UPFC 控制参数须要同时考虑暂态功角稳定性及电压稳定性的合理性,因此,建立基于UPFC的光伏高占比电网稳定性能优化目标函数为

式中:W1,W2为暂态功角稳定及电压稳定的权重系数,根据网架结构及稳定问题严重程度确定。
该目标函数越小,说明UPFC 抑制系统低频振荡能力及电压支撑能力越强,系统稳定性越好。
2 UPFC参数IMFO优化模型
2.1 基于MFO算法的UPFC参数优化模型
本文基于“飞蛾扑火”现象引入群搜索概念。首先,将 UPFC 串联控制参数 KPP,KIP,KIQ,KPQ和并联控制参数 KPDC,KIDC,KIV,KPV 的化解设置为飞蛾位置,每代UPFC 参数飞蛾按适应度函数排序后作为下一代UPFC 参数飞蛾的火焰;其次,UPFC 参数飞蛾与UPFC 参数火焰一一对应,为模拟飞蛾移动特性,应用螺旋函数来表征其UPFC 参数飞蛾飞行轨迹;最后,通过UPFC 参数火焰自适应熄灭机制来提高UPFC 参数全局寻优能力。
UPFC 参数优化MFO 算法可表示为三元组寻优问题:

式中:M 为 UPFC 参数飞蛾集合;OM 为 UPFC 参数飞蛾适应度值;f 为UPFC 参数适应度函数;P为UPFC 参数飞蛾更新机制;M' 为更新后UPFC参数飞蛾位置;T 为迭代判断函数,为真则跳出迭代循环,否则更新UPFC 参数后继续计算。
UPFC 参数飞蛾的螺旋更新函数为

即,根据上一代的UPFC 参数飞蛾、UPFC 参数火焰计算下一代UPFC 参数飞蛾位置,具体计算公式为

式中:t 为[-1,1]随机产生的位移变量;b 为螺旋函数的形状常数;Di为第i 个UPFC 参数飞蛾相对其UPFC 参数火焰的距离。

图4 为UPFC 参数飞蛾的移动示意图。任意一个UPFC 参数飞蛾 Mi至 UPFC 参数火焰 Fj的飞行路径为如图4 所示的螺旋线,因随机位移变量 t 的存在,UPFC 参数飞蛾可能落在 M1,M2,M3,M4,M5上,局部搜索能力较强,若更新后 UPFC 参数飞蛾的适应度较高,则其将会成为下一代的UPFC 参数火焰位置。

图4 UPFC 参数飞蛾位置更新机制Fig.4 UPFC moth location update mechanism
此外,UPFC 参数优化MFO 算法引入火焰熄灭机制,即UPFC 参数火焰数量Fnum随迭代次数而线性减少:

式中:N 为种群中的UPFC 参数飞蛾个数;k 为当前迭代次数;T 为总迭代次数。
在UPFC 参数火焰的熄灭机制中,应当以熄灭当前适应度最差的UPFC 参数火焰为目标进行火焰数量更新,这样才能够有效平衡算法的全局寻优与局部开发性能。
2.2 UPFC参数优化模型的改进
在光伏大规模并网条件下,随着光伏出力波动,其接入电网的有功无功平衡特性也处于动态波动过程中。由于光伏波动特性随机性大,选择初始值时,如果该初始值与光伏波动不相适应,那么,在上一节中的UPFC 参数优化算法中,即使给定的UPFC 参数初始值不够合理,在飞蛾和火焰位迭代求解过程中,由于对初始适应度较高的火焰更不易熄灭,将导致算法无法收敛。
针对前述UPFC 参数优化MFO 算法不足,本文采取以下改进方法。
(1)基于混沌 Iterative 序列的 UPFC 参数初始值的生成
为改善UPFC 参数MFO 算法对初始种群的依赖,利用混沌Iterative 序列来代替随机UPFC参数初始值产生方式,从而使得初始化种群分布更加均匀。
本文UPFC 参数初始值种群的Iterative 映射方程为

式中:b 为控制系数,可取(0,1),本文取 0.5,以此来增加UPFC 参数初始种群的多样性。
(2)基于 Lévy 飞行的 UPFC 参数飞蛾路径优化
为解决UPFC 参数飞蛾随机移动过程易陷入局部最优问题,本文将Lévy 飞行机制引入UPFC参数优化MFO 算法中[17],即UPFC 参数飞蛾在螺旋曲线中的前进距离按照Lévy 飞行跳跃路径确定,以此来增加UPFC 参数种群多样性,加强算法局部探索能力。UPFC 参数种群Lévy 分布的概率密度函数为

式中:λ 为幂次系数。
UPFC 参数飞蛾螺旋曲线采用下述的Lévy飞行跳跃路径更新机制:

式中:s 为UPFC 参数飞蛾飞行跳跃路径;参数β=λ-1;参数 μ,v 服从正态分布,从而可使 UPFC 参数飞蛾移动具有高度的随机性。
(3)UPFC 参数火焰的非线性熄灭机制
为解决UPFC 参数MFO 优化算法中火焰个数随迭代过程线性减少的问题,在保证迭代初期探索能力和后期新路径开发能力,并使得UPFC低维参数优化过程中能够具有更高的探索能力,本文引入凹函数中的幂函数来替代原有的UPFC参数飞蛾火焰线性熄灭过程:

式中:N 为当前飞蛾个数;T 为算法总迭代次数;k为大于1 的幂函数参数。
UPFC 参数火焰非线性熄灭机制下,算法的稳定性随k 增大而增大,达到一定值后又开始减弱,因此本文选择5 次幂函数来优化UPFC 参数火焰熄灭过程。
3 光伏高占比电网UPFC参数优化算法
3.1 UPFC参数优化模型求解流程
针对光伏高占比电网中有功无功潮流的不确定性,UPFC 优化参数应包括串联系统的有功部分、无功部分的PI 控制参数以及并联系统的直流部分、交流部分 PI 控制参数。因此,UPFC参数飞蛾位置可表示为L=[KPP,KIP,KIQ,KPQ,KPDC,KIDC,KIV,KPV]。其中,KPP,KIP,KIQ,KPQ 为 UPFC 串联部分控制参数,KPDC,KIDC,KIV,KPV 为UPFC 并联部分控制参数。
基于上一节中的MFO 优化模型,光伏高占比电网中接入的UPFC 装置控制参数优化的流程如下。
①初始化UPFC 参数种群M,应用式(9)的混沌Iterative 序列来确定UPFC 参数飞蛾种群的初始化位置,并根据式(3)计算UPFC 参数种群个体适应度OM。
②将UPFC 参数飞蛾种群M 按照适应度从小到大排序后生成UPFC 参数火焰种群F 及其适应度OF。
③由式(12)确定UPFC 参数火焰个数并将末尾UPFC 参数火焰熄灭,对应UPFC 参数飞蛾参照适应度最差个体。
④由式(5)求取UPFC 参数飞蛾与火焰的距离,生成螺旋函数,联合式(11)更新UPFC 参数飞蛾位置M'。
⑤按式(3)计算更新后UPFC 参数飞蛾适应度OM,并判断是否满足退出条件,是,UPFC 参数优化结束;否,返回第二步重新计算,直至满足退出条件。
3.2 UPFC参数优化算法实现
本文采用MATLAB 与PSD-BPA 联合仿真方法,对算法进行编程。图5 为联合仿真主要流程图。联合仿真算法实现主要包括以下过程。
①以MATLAB 联结高占比光伏电力系统潮流文件集合以及稳定文件集合,实现算例参数的修改。
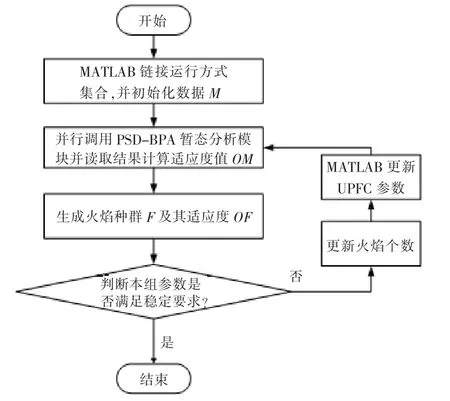
图5 MATLAB 与BPA 联合仿真算法实现流程图Fig.5 MATLAB and BPA joint simulation flow chart
②以调用函数运行PSD-BPA 的PFNT.exe 潮流计算程序以及SWNT.exe 稳定计算程序,模拟高占比光伏电力系统大扰动事故并读取相关结果数据。
③以进程监视函数来实现高占比光伏电力系统联合仿真的循环运行。
④通过MATLAB 多线程运行程序实现高占比光伏电力系统算例文件的并行计算,提高计算速度。
4 仿真分析
本文采用光伏高占比电网有功无功不确定性波动下的运行方式数据,建立光伏高占比电网UPFC 参数优化仿真模型,对某省级电网内加装UPFC 后的某双回线路在不同控制参数下断面极限提升效果进行仿真验证。光伏高占比电力系统UPFC 参数优化仿真系统如图6 所示。
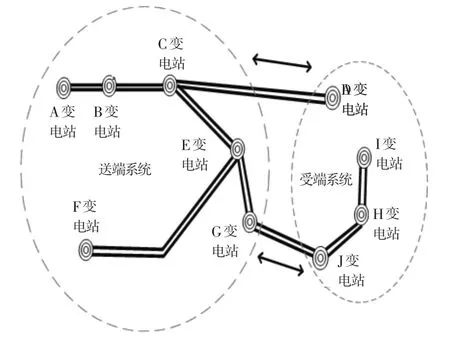
图6 光伏高占比电力系统UPFC 参数优化仿真系统Fig.6 Structure diagram of a provincial power grid
如图6 所示,变电站ABCEFG 组成送端系统电网,DIHJ 组成受端系统电网,线路C-D 与线路G-J 组成两系统之间的送电断面,送端系统电网光伏占比较高,存在日间送端型电网向夜间的受端型电网转换的问题。白天功率外送能力受暂态问题制约,夜间受电能力受暂态电压稳定问题制约。线路G-J 加装UPFC,通过优化UPFC 控制参数提高UPFC 对系统的阻尼增强作用与暂态电压支撑作用。设置串联系统参数范围:KPP∈(0,0.5],KIP∈(0,20],KPQ∈(0,0.5],KIQ∈(0,20];并联系统参数范围KPDC ∈(0,0.5],KIDC ∈(0,20],KPV∈(0,0.5],KIV∈(0,0.5],在送电方式下暂态稳定问题与电压稳定问题均较为突出,W1与W2取为20 与1;在受电方式下电压稳定问题较为突出,W1与 W2取为 20 与 5。表1和表2为优化前后参数。
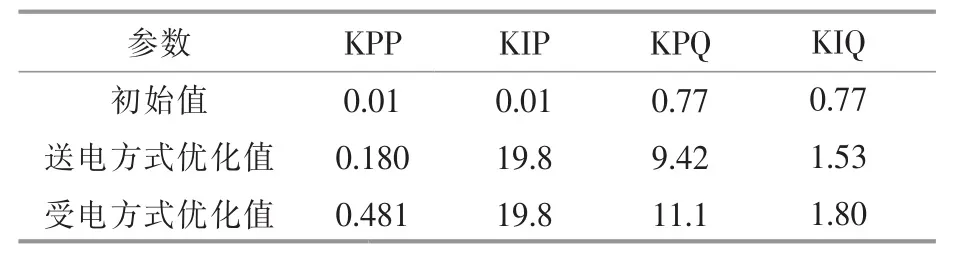
表1 串联系统控制模型参数Table 1 Series system control model parameter
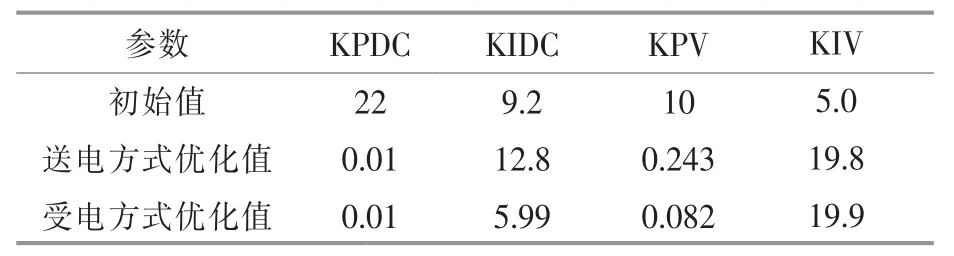
表2 并联系统控制模型参数Table 2 Parallel system control model parameter
由图7~9 可以看出,用MFO 算法对UPFC 控制器参数进行优化后,送电方式下阻尼比由0.015增加到0.065,系统的暂态能力提高,并且暂态过程中电压振荡幅度降低,更接近故障前运行电压(0.95 p.u.),电压恢复稳定时间更快,电压稳定能力增强。受电方式下暂态最低电压由0.916 上升到0.939,且稳态电压由0.93 上升到0.94。暂态电压稳定能力得到明显提升,参数优化效果明显。

图7 送电方式下C-D 线路N-2 故障后线路G-J 功率曲线Fig.7 Line G-J power curve after fault

图8 送电方式下C-D 线路N-2 故障后母线J 电压曲线Fig.8 Bus J voltage curve after failure
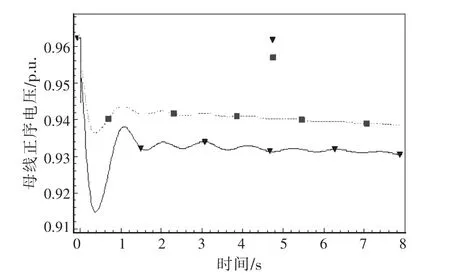
图9 受电方式下C-D 线路N-2 故障后母线G 电压曲线Fig.9 Bus G voltage curve after failure
为进一步验证本文提出的UPFC 参数优化算法相较于传统飞蛾扑火算法MFO 的优势,采用光伏高占比电网暂态功角稳定及电压稳定为优化目标进行对比验证,目标函数值的迭代曲线如图10所示。从图10 中可以看出,采用本文IMFO 算法得到的光伏高占比电网暂态功角稳定及电压稳定性收敛速度更快,精度更高,传统MFO 算法误差较大,收敛时间较长。
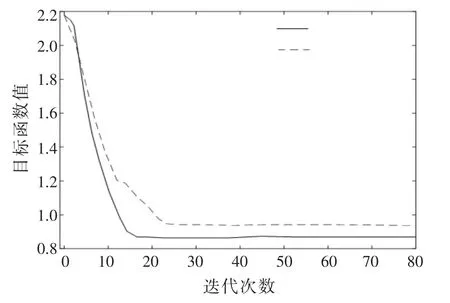
图10 目标函数值收敛曲线对比Fig.10 The objective value in each iteration time
5 结束语
本文提出一种基于IMFO 算法的UPFC 控制参数优化方法,根据光伏出力波动特性,提出了混沌 Iterative 序列和 Lévy 飞行的 UPFC 参数初始种群和飞行路线优化方法,有效提高了UPFC 参数优化速度和精度。采用某省级电网实际运行数据和本文建立的光伏高占比电力系统UPFC 优化仿真模型进行仿真验证,仿真结果表明,本文提出的高占比光伏电网UPFC 参数IMFO 优化算法能有效地提高UPFC 设备对系统振荡的阻尼作用以及暂态电压支撑能力,保证了光伏高占比地区功率双向交换过程的暂态性能和电压稳定性能。
