Dual smoothing ionospheric gradient monitoring algorithm for dual-frequency BDS GBAS
2020-02-24ZhipengWANGYuYINDnSONGKunFANGQingLIXioLI
Zhipeng WANG, Yu YIN, Dn SONG, Kun FANG,*, Qing LI, Xio LI
a National Key Laboratory of CNS/ATM, School of Electronic and Information Engineering, Beihang University,Beijing 100083, China
b Beijing Hualong Tong Science and Technology Co, Ltd, Beijing 100084, China
KEYWORDS Approach;Augmentation;Integrity;Ionosphere-monitoring;Satellite navigation;Smoothing algorithms;Steady state;Threshold
Abstract In this study, a Dual Smoothing Ionospheric Gradient Monitor Algorithm (DSIGMA)was developed for Code-Carrier Divergence (CCD) faults of dual-frequency Ground-Based Augmentation Systems (GBAS) based on the BeiDou Navigation Satellite System (BDS).Divergence-Free (DF) combinations of the signals were used to form test statistics for a dualfrequency DSIGMA.First,the single-frequency DSIGMA was reviewed,which supports the GBAS approach service type D(GAST-D)for protection against the effect of large ionospheric gradients.The single-frequency DSIGMA was used to create a novel input scheme for the dual-frequency DSIGMA by introducing DF combinations. The steady states of the test statistics were also analysed.The monitors were characterized using BDS measurement data,whereby standard deviations of 0.0432 and 0.0639 m for the proposed two test statistics were used to calculate the monitor threshold. An extensive simulation was designed to assess the monitor performance by comparing the Probability of Missed Detection (PMD) according to the differential error with the range domain PMD limits under different fault modes. The results showed that the proposed algorithm has a higher integrity performance than the single-frequency monitor. The minimum detectable divergence with the same missed probability is less than 50% that of GAST-D.
1. Introduction
Ground-Based Augmentation Systems (GBAS) were developed to provide differential corrections and integrity monitoring for Global Navigation Satellite Systems (GNSS). The GBAS CAT I standard is required by the International Civil Aviation Organization (ICAO) to support precision approach with a Decision Height (DH) of 200 ft1and has been implemented in China since 2017.2Following the rapid development of the BeiDou Navigation Satellite System (BDS), a BDS GBAS prototype has been developed and tested to support GBAS approach service type D (GAST-D) with a DH below 100 ft3. However, the performance of the current system continues to be impacted by ranging source faults, especially Code-Carrier Divergence (CCD), erroneous ephemeris, excessive acceleration and signal deformation. Integrity monitoring algorithms have been designed to protect the system against these types of faults.
Multi-constellation and multi-frequency GNSS receivers provide the possibility of combining dual-frequency observations. Faults from ionospheric activity and interference can be easily removed by a dual-frequency combination. Dualfrequency GBAS, known as GAST-F, was designed as an extension of single-frequency GBAS,which supports the precision approach to the lowest CAT IIIb minima.3As dualfrequency GBAS is still in its infancy, monitoring algorithms have not been thoroughly developed. This study focuses on monitoring algorithms for dual-frequency GBAS, under the auspices of the Dual-Frequency Multi-Constellation (DFMC)GBAS Project of China.4Dual-frequency smoothing techniques in GBAS5typically have two modes: Divergence-Free(DF) and Ionosphere-Free (IF). The IF combination can remove all the ionospheric items in measurements but imports a high level of noise,because the inflation factor is larger than that of the single-frequency mode,which increases the differential error. The DF combination removes ionospheric items using the difference between the code and carrier rather than the original measurement. This scheme has a lower noise level than IF, which improves monitor performance. As the two combinations are linearly related, we consider only the DF model as our dual-frequency combination in the following sections.
The algorithm for a monitor needs to be consistent with the fault space. The GAST-D monitor design consists of a CCD monitor to protect against the code-carrier divergence threat,6a carrier Acceleration-Ramp-Step (ARS) monitor to protect against the acceleration threat7and a dual smoothing ionospheric gradient monitoring algorithm (DSIGMA) to address ionospheric gradient anomalies.6The monitoring algorithms for dual-frequency GBAS are still being formulated, tested and developed. The introduction of dual-frequency measurements increases the complexity of the GAST-F fault space.6Three typical monitors for future dual-frequency GBAS have been designed to date:the CCD monitor,the Ionospheric Gradient Monitor (IGM) and the innovation monitor. The CCD monitor was developed by the French National School of Civil Aviation (E´ cole Nationale de l’Aviation Civile, ENAC).8The CCD monitor was designed to protect against the codecarrier divergence fault based on dual-frequency measurements. This algorithm is conservative, because all available statistics for threat response are considered to address the entire threat space.8This algorithm exhibits superior performance, but the smoothing filter used for the metrics results in an extended response time. The worst-case fault mode, in particular, requires a 132 s-delay,8which is considered the main limitation of this monitor. The IGM was developed by the German Aerospace Center (Deutsches Zentrum fu¨r Luftund Raumfahrt, DLR), the Korean Advanced Institute of Science and Technology (KAIST) and the Technical University of Munich (TUM).9The IGM uses direct dual-frequency measurements to estimate the ionospheric delay.9In fact, a pseudo-ionospheric gradient is measured because of the inflated noise and the time difference between airborne and ground detection. The innovation monitor was designed for signal distortion faults10and has a rapid response,with a time delay below 50 s.10Although this monitor is sufficiently sensitive to capture step faults in pseudo-range measurements,10these step faults are only a portion of the signal distortion faults. Thus, this algorithm is considered as performing ‘‘indirect monitoring”. The three aforementioned monitors all utilize the dual-frequency combination and therefore demonstrate the development of dual-frequency monitors,but each has unique limitations. New algorithms are needed to improve monitoring system performance.
DSIGMA and CCD were both designed to deal with codecarrier divergence faults. The extended CCD response time motivated the development of an alternate monitoring algorithm, DSIGMA. Thus, DSIGMA can be regarded as an extension of the CCD monitor. In this study, DSIGMA is redesigned and evaluated to serve as a future dual-frequency BDS GBAS. Unlike the single-frequency case, the dualfrequency combination changes the fault space. Satellite clock failure and excessive acceleration faults are both part of the GAST-F fault space, which are not covered by GAST-D.The dual-frequency DSIGMA parameters were determined using measurements from reference receivers at Dongying Airport to analyse deviations. Then, the monitor threshold was modelled using Gaussian over-bounding developed by DeCleene.11The range domain probability of missed detection(PMD) limits were presented by ICAO in 2016 to determine whether monitor performance could meet aircraft safety requirements.12The PMD limits are derived from limiting and malfunctioning aircraft cases, which is an effective means of monitor testing. As the worst monitor performance occurs after filter initialization following fault onset,6the missed probability and differential error can be calculated to validate monitor performance at this compliance level. Therefore,single-frequency and dual-frequency DSIGMA monitors can be compared under different simulation conditions to determine whether the performance of our monitor is better than that of existing monitors.
This paper is organized as follows. Section 2 is a review of single-frequency DSIGMA processing using a steady-state analysis. The original model and fault space are provided to explain the algorithm operation. Section 3 is a description of how the dual-frequency DSIGMA monitor is used to calculate dual-frequency test statistics. The fault space and state response are also analysed.In Section 4,the threshold is calculated using real data collected at Dongying Airport to characterize our model. In Section 5, the performances of different monitors are compared by using the range domain PMD limits and an experimental design.A brief summary of the key points of the paper is provided in Section 6.
2. Single-frequency DSIGMA processing
Using GAST-D for airborne ionosphere monitoring requires that CAT II/III operations be supported even for a nonnominal ionospheric condition. A significant gradient produces an error that cannot be removed by GBAS differential processing. The DSIGMA concept was proposed and developed to address this problem. First, we review the carriersmoothed-code filter, which is the basic mode for smoothing in GBAS. Then, we briefly introduce DSIGMA for GAST-D and present the steady states for further analysis.
2.1. Carrier-smoothed-code (CSC) filter for GBAS
A CSC filter is currently a regular feature of modern receivers.As the carrier phase has lower noise than the pseudo-range,the observation of the carrier phase is used to smooth the pseudorange to mitigate the effects of receiver code noise and the multipath.7Fig. 1 illustrates the carrier smoothing process, where Ψ and Φ represent the code and carrier measurement, respectively. F(s) is the transfer function of this low-pass filter.
This process can also be expressed by using the Laplace form as follows5:

2.2. DSIGMA for GAST-D
DSIGMA was introduced by Boeing13and developed for ionospheric gradient monitoring in GAST-D. Two different time constants are employed, and carrier smoothing is performed on the pseudo-range measurements13to determine the difference between the outputs of the two smoothing filters,as illustrated in Fig. 2.
There are two smoothing filters with different time constants in DSIGMA processing. The first time constant is 100 s for compatibility with GBAS CAT I operations.GAST-D requires the time constant of the second filter to be 30 s. As shown in Fig. 2, the measurements collected from receivers are subjected to three processes, namely, smooth filtering, differencing and positioning. The differences between the two position solutions are denoted by dvand dland indicate the magnitude of the ionospheric gradient times the difference in the smoothing time constants. This detection can be performed after differential correction, denoted as dΨ, or before differential correction, where dΨadenotes air detection and dΨgdenotes ground detection.13Note that dΨacan be computed at any time, even if the ground facility is unavailable.13Therefore dΨadoes not depend on the correction information,which is used here to analyse the steady states of the DSIGMA.
The mathematical formulation of DSIGMA in the Laplace domain is given below.

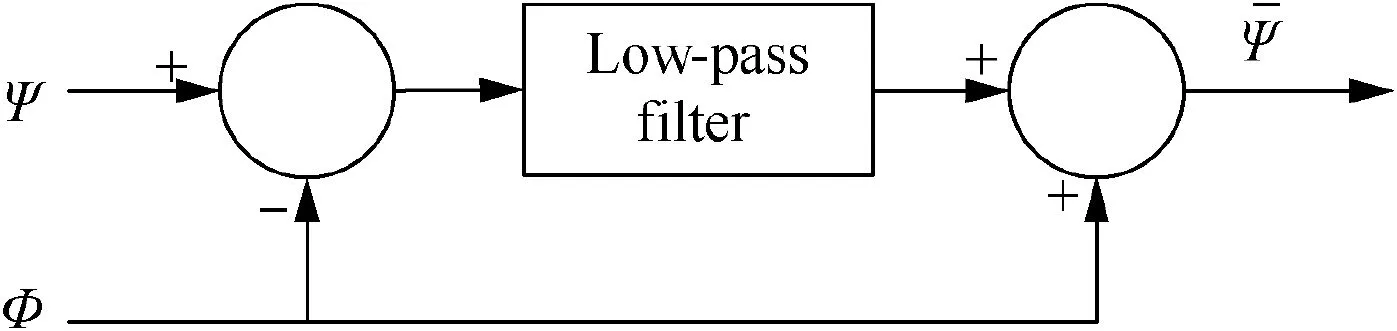
Fig. 1 GBAS carrier-smoothed code process.
Denoting a divergence in Ψ as dρand a divergence in Φ as dφ, the steady states are derived as follows:

where dρ≠dφis the ionospheric divergence fault that can be detected by DSIGMA.
3. Proposed dual-frequency DSIGMA processing
In this section,we focus on dual-frequency DSIGMA processing.We introduce the input scheme based on the DF combination for BDS signals. We obtain the final DF statistics following the same steps as for the single-frequency DSIGMA shown in Fig. 2. That is, a user can calculate the test statistics by inputting the candidates into the CSC filter to obtain ‘‘the smoothed pseudo-range”. The steady states are also derived.Finally, we implement the algorithm in a practical station to obtain test results.
3.1. Filter input scheme
Dual-frequency measurements can be used to remove ionospheric divergences, thereby improving the accuracy of the position solution. However, experiments have shown that dual-frequency IF observations increase noise, resulting in higher errors than for the single-frequency mode.8Singlefrequency positioning with dual-frequency ionospheric monitoring was proposed to improve both accuracy and integrity.The DF model is one of typical smoothing methods for GBAS that remove divergences without inflating the noise at the pseudo-range level.
The proposed monitor preserves the DSIGMA form, as shown in Eq. (2), but the dual-frequency combination was used to form the test statistics instead of using the primary measurements directly.That is,the DF model was used to promote the pseudo-range and phase to a new smoothing pseudorange form in the dual-frequency domain,as shown in Table 1.The alternative signals are BDS B1I and B3I(fB1=1561.098-MHz and fB3=1268.52 MHz).
The DF model can remove the extra ionospheric terms caused by the CSC filter, but the ionospheric delay in the current epoch remains.8The DF1 and DF3 candidates in the Code-Minus-Carrier (CMC) process can be used to remove the common terms except for the noise at the pseudo-range level, which is typically represented by a zero-mean Gaussian distribution.
3.2. Steady-state analysis
DSIGMA for GAST-F needs to allow the monitor to protect the aircraft against ionospheric divergences on both frequencies. DSIGMA has a complex fault space and steady states induced by ionospheric divergence.The deviation of the steady state of DF1 is given below, where the divergence in ρ1is denoted by dρ1and so forth.

Fig. 2 Dual smoothing ionospheric gradient monitoring algorithm (DSIGMA).13

Table 1 Dual-frequency DSIGMA filter input candidates.
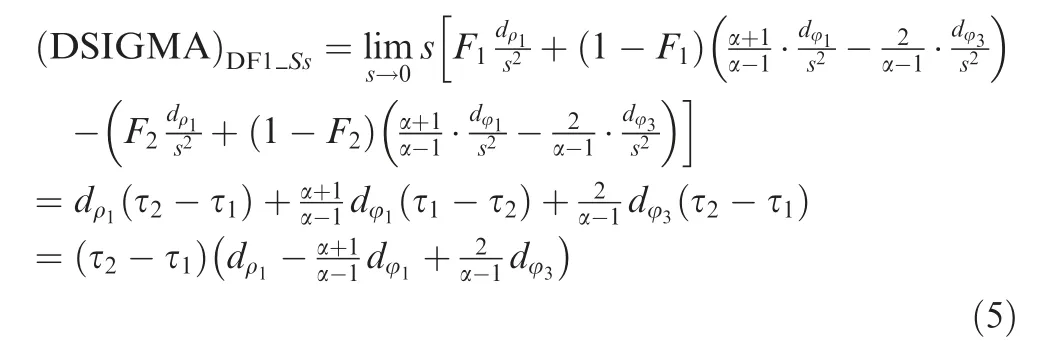
As shown in Eq.(5),the steady state should be zero for the normal condition. The dual-frequency DSIGMA provides protection against this threat, which is indicated by errors in the dual-frequency combination. The steady state of DF3 can be similarly derived.

Comparing Eqs.(5)and(6)shows that the ionosphere error can be removed by the dual-frequency combinations under normal conditions but is more likely to result in a fault if the combination fails. Thus, the fault space of the DSIGMA for GAST-F is obtained as follows:

Thus, a user can remove ionospheric errors precisely by dual-frequency combinations. However, other errors in the process also need to be considered. The DSIGMA process can be described as

For candidate DF1, the combination is geometry-free, and common errors can be removed after the differencing process.We define the test statistics of DF1 as x1:

where ηρ1represents the code-tracking noise and multipath for the code B1 measurements. Similarly, we can obtain

where ηρ3represents the code-tracking noise and multipath for the code B3 measurements.
To explore the steady-state response under different fault modes, we simulate four single-divergence fault modes: code B1(MC1),carrier phase B1(MP1),code B3(MC3)and carrier phase B3(MP3).8Fig.3 illustrates the response of the two test statistics to the four fault modes. The filter outputs are based on a simulation with a divergence of 3 mm/s,which is a typical value for airborne users.13The figure shows that the response varies with the fault mode, which verifies the analytical solution proposed in Eqs. (5) and (6). That is, the filter scheme can provide an unbiased estimate of the divergence of measurements by dividing the difference in the smoothing time constants by the corresponding scaling factors.The simulation results also show that a finite time is required for the filters to converge.
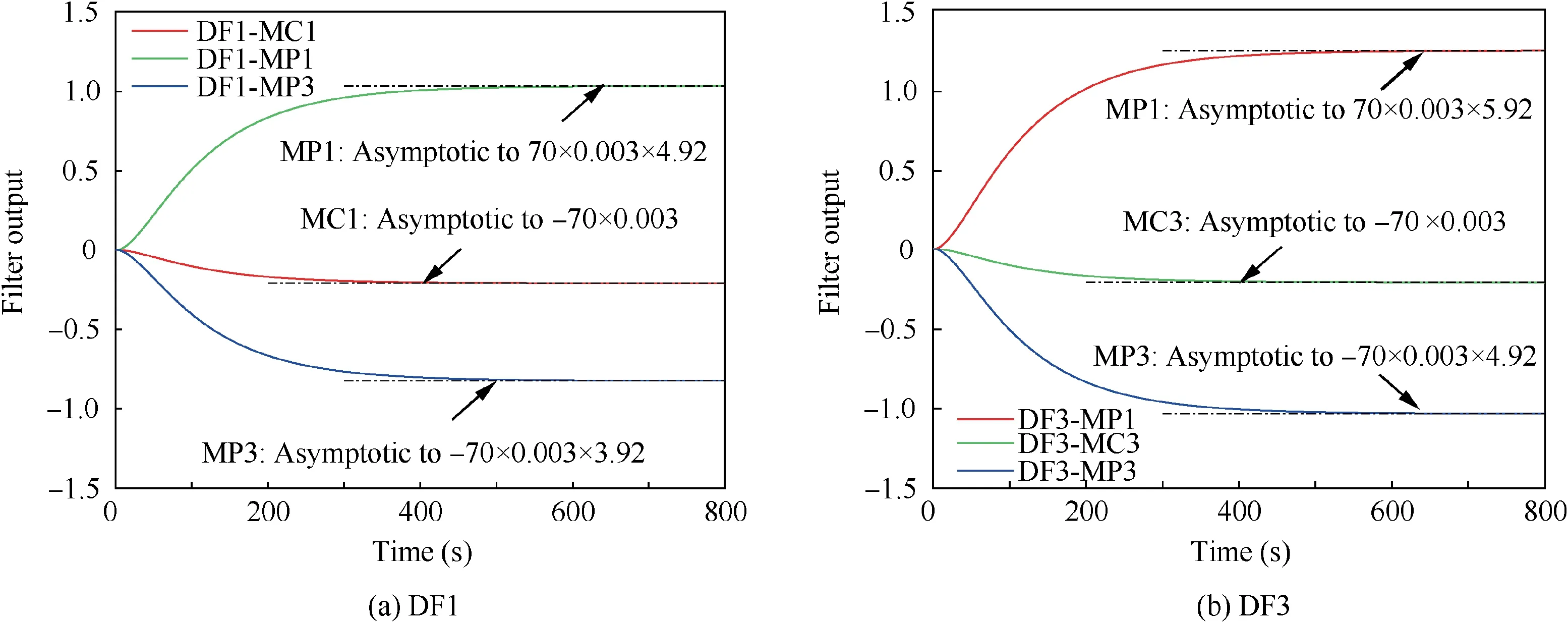
Fig. 3 Steady-state response for different single-divergence fault modes.
3.3. Practical application
To characterize the monitor, we collected datasets for the two statistics at the sites of the north glide slope station at Dongying Airport in China.This GBAS station was jointly developed and implemented by Beihang University,Tianjin 712 Communication&Broadcasting Co.,Ltd.and the Dongying Research Institute of Beihang University. The data were measured on August 27th, 2019 using 2-Hz sampling. A total of 14 BDS satellites (BeiDou II) are visible with both the available B1I and B3I measurements (SV1 to SV14).
Fig.4(a) shows that both the DF1 and DF3 measurements fluctuate around zero over time, which is characteristic of the multipath effect, as illustrated in Eqs. (9) and (10). Different colours are used to represent different satellite measurements.Fig.4(b)is a box plot for different satellites:SV6 to SV14 show stable signals,SV1 to SV4 are slightly worse,and the test result of SV5 is the worst and considered to be an outlier. This phenomenon occurs because SV5 is run at the GEostationary Orbit (GEO), where multipath effects result from continuous occlusion. It may be necessary to remove the SV5 measurements in future tests to prevent the introduction of noise and false alarms into the monitoring process. The development of BeiDou III has provided more satellites for our monitoring algorithm. It may be possible to exclude GEO during future monitoring.
The receiver layout is an important source of error that impacts our tests and should be considered in addition to the satellite signal.Fig.5(a)shows the receiver layout at Dongying Airport that was used to test the application of the algorithm.All four receivers are equipped with the same choke ring antenna. Fig. 5(b) shows the standard deviations of the test statistics among all four receivers. The DF3 test results are worse than those of DF1, suggesting degradation of B3I from multipath effects.Among the four receivers,receiver no.1 has a lower performance than the other three receivers.The position of the receiver antenna or the real-time ionospheric status may have caused blocking or a multipath effect.A reliable antenna location is needed to ensure the best monitor performance.
4. Monitor characterization
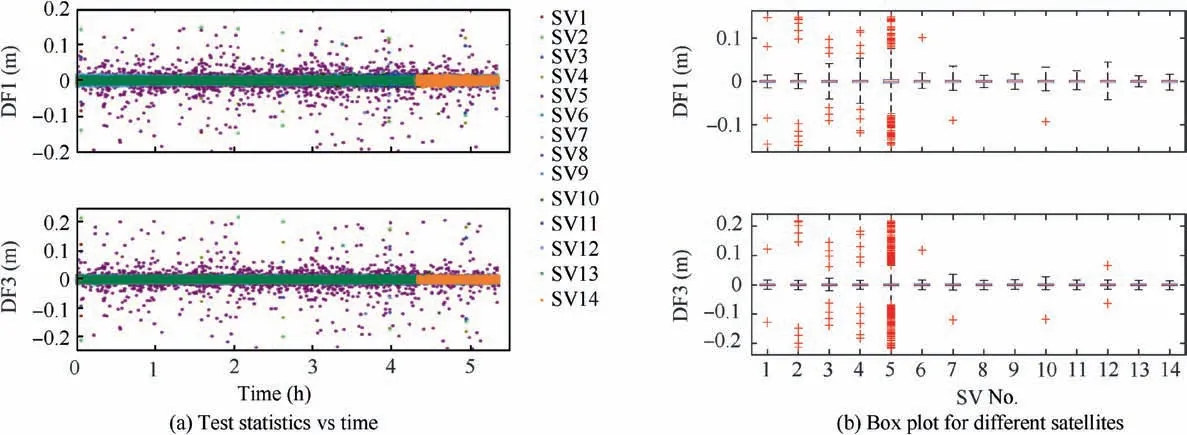
Fig. 4 Test statistics of DF1 and DF3 for different satellites (Aug 27th, 2019, Dongying Airport).
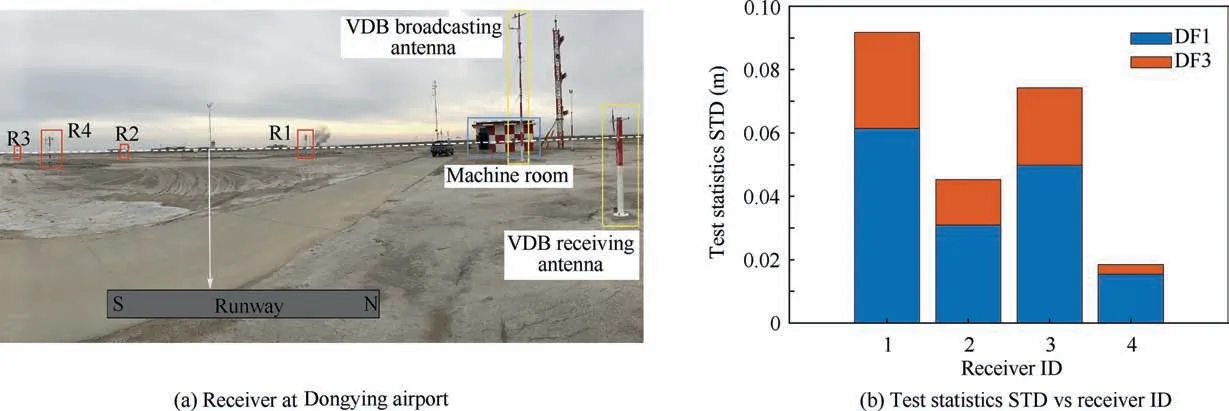
Fig. 5 Test statistics of DF1 and DF3 for different receivers (Aug 27th, 2019, Dongying Airport).
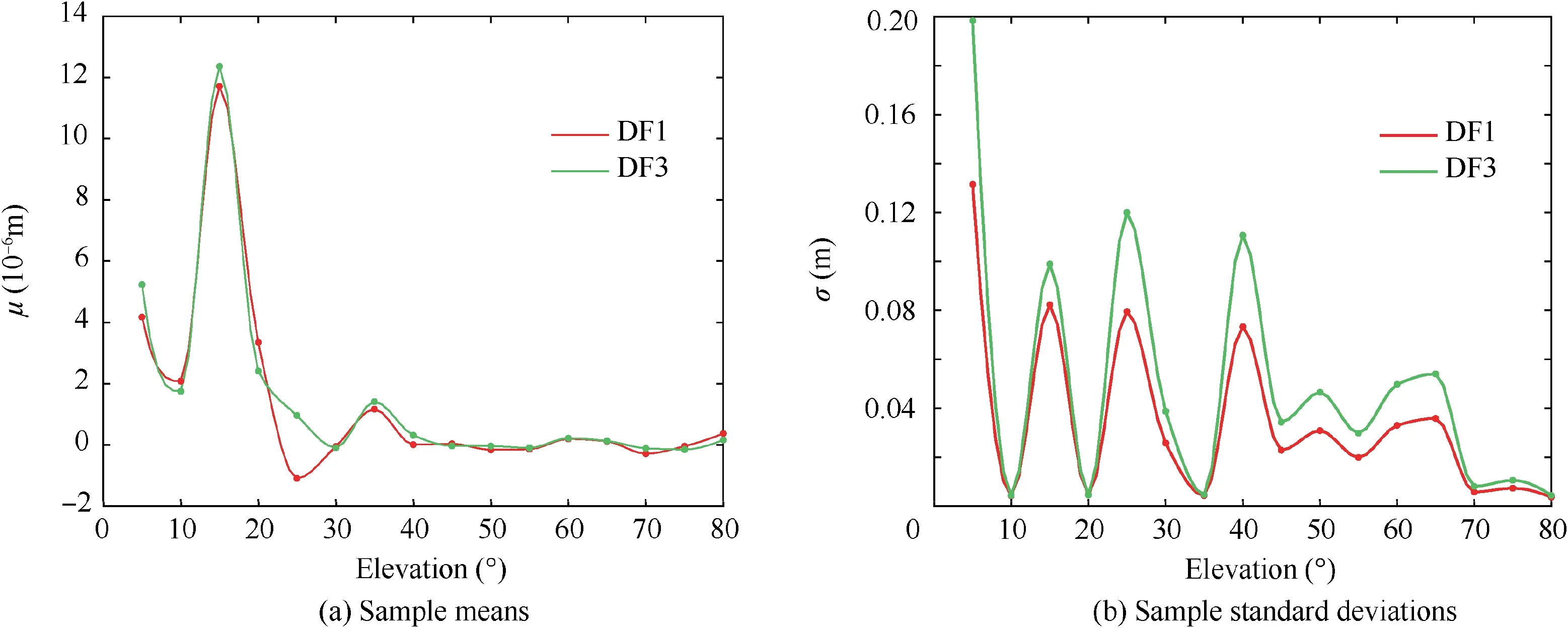
Fig. 6 Interpolation in elevation bins of 5 degrees each.
In this section, the empirical data collected at Dongying Airport is used to characterize the monitor.We calculate the sample means and standard deviations of DF1 and DF3 in 16 elevation bins of 5 degrees each. The results are interpolated to other elevations using the Piecewise Cubic Hermite Interpolating Polynomial(PCHIP),which is appropriate for this case,as shown in Fig.6.The actual means are far less than the standard deviations, which are very close to zero. We expect the means to be closer to zero for a larger dataset in accordance with our assumption.Thus,we neglect the impact of the means on the test statistics. The standard deviations vary across the elevation bins, but the amplitudes are stable from 0 to 0.2.In addition, the standard deviations are larger in some lowelevation bins.
The two test statistics DF1 and DF3 are normalized by the sample variance for the different elevation bins and plotted on a Cumulative Distribution Function (CDF) plot. The Gaussian over-bounding method14is used for the analysis.Our purpose is to obtain a reliable value for modelling the monitor.However, the estimate based on these standard deviations of the samples may include the nominal ionospheric divergence,which is conservatively expected to yield more errors. More data analysis is required to finalize the design of this monitor.However,the data analysis is sufficient to test and validate the monitor. A smaller threshold with less noise will be used in a future analysis.
Fig. 7 shows the CDF of the empirical test results for our data set.The dashed line in the plot is the CDF for a Gaussian distribution with the same standard deviation as the data.Note that both the DF1 and DF3 distributions have large non-Gaussian tails.An over-bound of the two empirical distributions in the quantile domain yields standard deviations of σDF1=0.026 999 m and σDF3=0.038 673 m, which are used to characterize the monitor.
As shown in Table 2, we calculate the threshold by overbounding the actual distributions. Considering continuity allocation,15the allocated probability of a fault-free alarm for a CCD fault is 10-7per 15 s. Then, the associated Gaussian fault-free detection multiplier for the probability is Kffd=5.73,15which leads to the recommended thresholds. In Section 3, GAST-F was shown to have a different fault space than GAST-D. Thus, the allocated probability of the dual-frequency CCD fault needs to be experimentally validated, which will be carried out as part of a future analysis.
The thresholds of the test statistics can be used to analyse the monitor performance.8Fig. 8 shows the probability of a missed detection vs. the magnitude of the divergence rate.For GAST-D, the threshold is set to 1.1 m (as provided by Boeing13). Fig. 8 shows that the proposed dual-frequency DSIGMA has a higher performance than the singlefrequency DSIGMA because of a lower detectable divergence with the same PMD. The dual-frequency DSIGMA performance varies with the GAST-F fault modes.DF3 has a higher performance than DF1.Further performance validation is presented in the next section using experimental design.
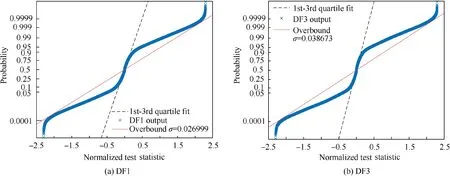
Fig. 7 CDF plot for normalized test statistics.

?
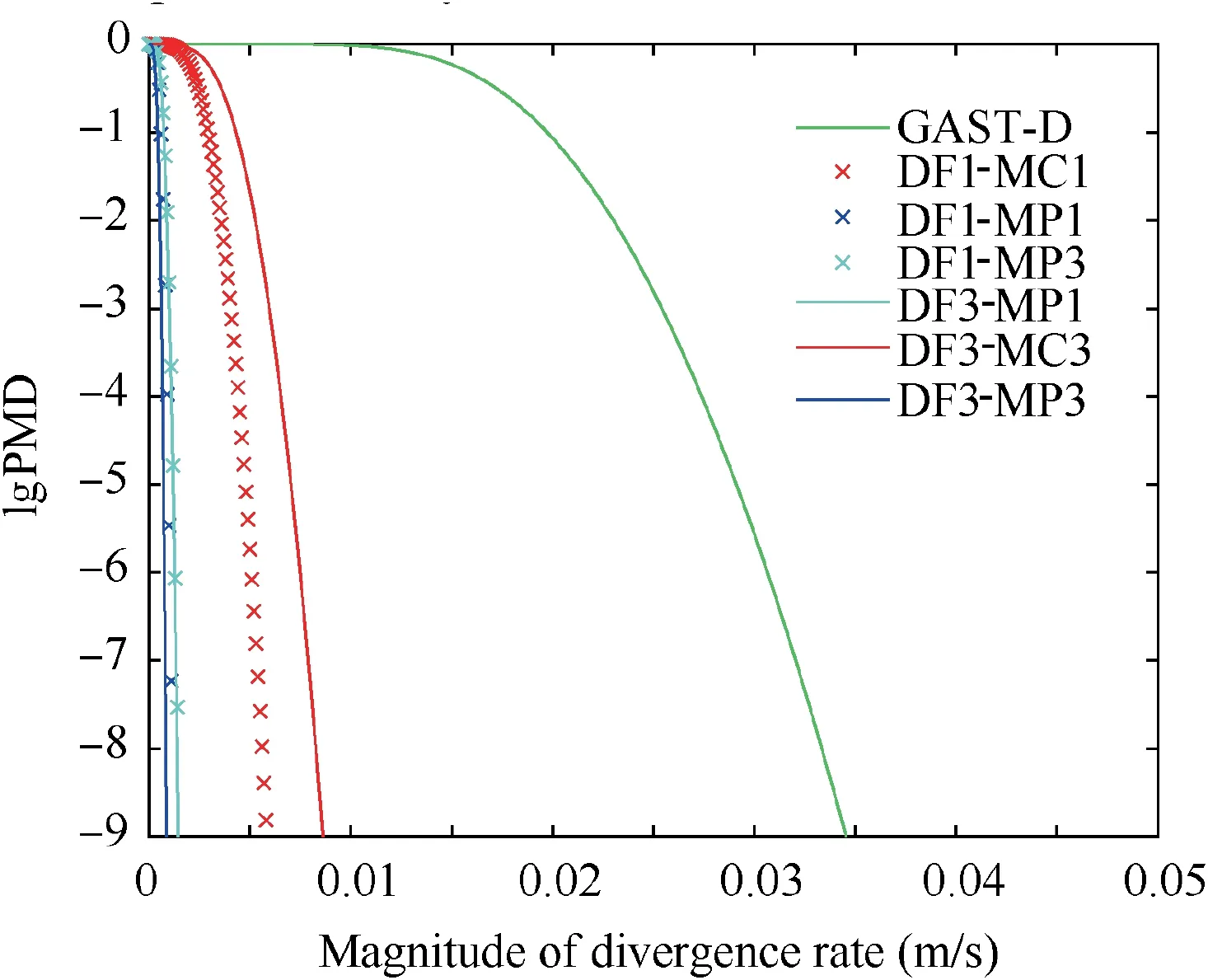
Fig. 8 DSIGMA monitor performance at steady state.
5. Performance validation
The monitor PMD compliance requirement,namely,the range domain PMD limits, has been defined in the ICAO standard document.12This requirement is derived from the Navigation System Error(NSE)and is based on both the limiting and malfunctioning case constraints, as shown in Fig. 9. For performance validation, we design an experiment to calculate the PMD and the differential range error ER,from which we determine whether the requirements of the range domain PMD limits can be met.
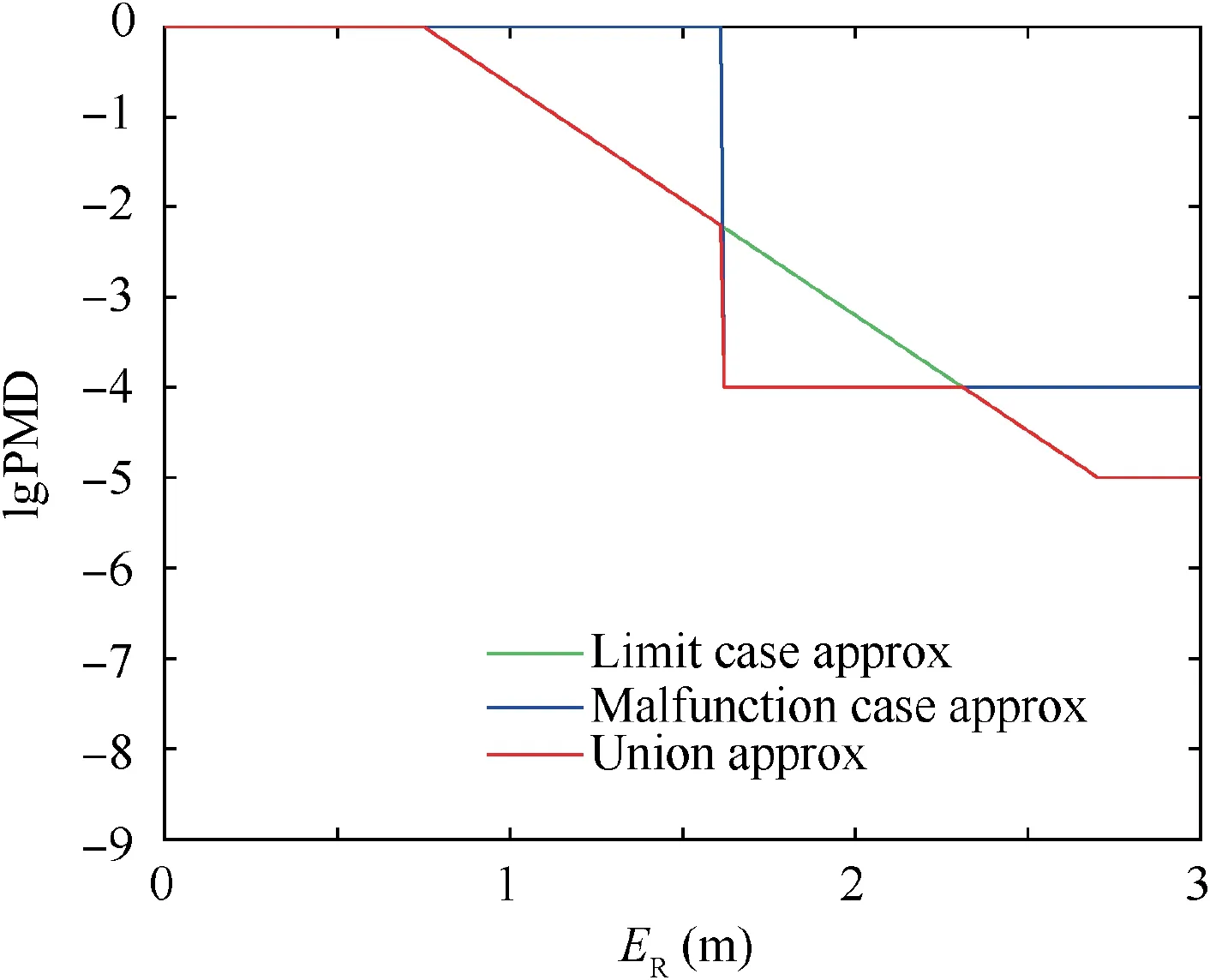
Fig. 9 Range domain PMD limits for monitor performance validation.12
The timing values impact the monitor performance10in addition to the PMD and differential range error ER.The relationship between these factors is expressed in Eq.(11),where f is defined as the mapping function, TTDABA is the allowed time to detect and affect the broadcast, and τGrepresents the ground latency.12In GAST-D, a TTDABA of 1.5 s is used to define a limit for protecting the aircraft against faults.6

IF measurements have been shown to introduce unexpected noise via inflation.8,16To address this problem, a ‘‘singlefrequency positioning with dual-frequency monitoring” strategy was applied in the Single European Sky Air Traffic Management Research (SESAR) project.17In our study, the PMD performances of BDS B1I and BDS B3I are assessed,assuming that the single-divergence fault modes are imported. The following Systemic Structural (SS) hypotheses are assessed, as required in relevant standards, to evaluate monitor performance.
(1) SS_01: Single-frequency positioning (BDS B1I, BDS B3I) with dual-frequency monitoring (DF1, DF3).
(2) SS_02: The multipath noise obeys a Gaussian distribution, and the parameters follow Section 4.
(3) SS_03: The faults follow the single-divergence fault modes (MC1, MP1, MC3, MP3), occurring on the B1 frequency or the B3 frequency.and 100 s for the two DSIGMA filters, in accordance with the message type defined in GAST-D.21The ground latency,denoted by τG, is set to 1.5 s, which equals the TTDABA value,because we do not consider error growth when evaluating monitor performance compliance. From Eq. (3), we infer that d=dρ1-dφ1can be imported to control the CCD fault in GAST-D; the range of divergence is chosen to produce a simulation with a PMD that is not less than 10-9. For GAST-F, the single-divergence fault modes (MC1, MP1,MC3 and MP3) are used as the fault source based on‘‘single-frequency positioning with dual-frequency monitoring”.

Table 3 Simulation configuration.
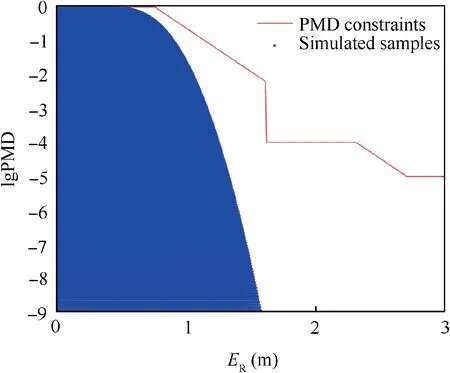
Fig. 10 Simulated results for GAST-D.
Fig. 10 shows the simulated results for GAST-D. The blue dots are the simulated samples from the experimental design,and the red line represents the range domain of the PMD limits. The monitor performance meets the requirements of the standard. The experimental results also show that the samples are close to the constraints, implying that it may be unsafe to reduce the delay time or use another frequency signal.
Fig. 11 shows that DF1 and DF3 can meet the current PMD limits under all fault modes for a 50 s time delay. Our simulation performs better for code divergence than carrier divergence. The dual-frequency monitor has a higher performance than GAST-D,and the minimum detectable divergence with the same missed probability is less than 50% that of GAST-D, which can be expected to meet the future GAST-F requirements. The time delay can even be reduced below 50 s, which corresponds to a faster response than the dualfrequency CCD monitor. Note that BeiDou II signals (B1I and B3I)are used in the model in this study.In the current Bei-Dou III signal design, QMBOC and ACE-BOC have already been applied to the new signals, B1C and B2a, respectively,which improves the flexibility of signal modulation and resolves the conflict between the requirement of diversified service and the limitation of both the bandwidth and the transceiver power.22The development of high-quality BeiDou III signals is expected to improve monitor performance.However,further tests and verification are still required.
6. Conclusions
A novel dual-frequency DSIGMA monitor for BDS GBAS is introduced in this paper. This monitor has a higher performance than the single-frequency monitor in the current standard and a faster response than the dual-frequency CCD monitor, which is expected to be included in future GAST-F monitoring algorithms.
The unique features of the novel monitor are given below:
(1) An input scheme was designed for dual-frequency DSIGMA by introducing DF combinations. A steadystate analysis shows that this scheme can protect users against threats from GAST-F fault space, such as satellite clock failure and excessive acceleration.
(2) The parameters of the dual-frequency DSIGMA monitor are based on an analysis of measurement data,which is reliable in the nominal case, especially for BDS.
(3) The proposed monitor meets the current PMD limits,and the minimum detectable divergence with the same missed probability is less than 50% that of GAST-D,which results from DF combination.
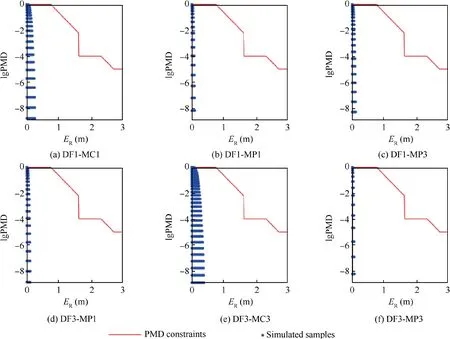
Fig. 11 Simulated results for GAST-F single-divergence fault modes.
As the GAST-F standards are still under development, the allocated probabilities of continuity and missed detections require further experimental validation, which will be performed as part of a future analysis. Further study is also required to obtain a threshold with less noise, which is an important step in improving and developing the monitor.
Acknowledgements
The authors would like to thank many people at the National Key Laboratory of CNS/ATM for their advice and interest.The work was carried out with financial support from the National Natural Science Foundation of China (Nos.61871012,U1833125),a project from the Ministry of Industry and Information Technology(Airborne RAIM/ARAIM Technology),Open Fund Project of Intelligent Operation Key Laboratory of Civil Aviation Airport Group (No.KLAGIO20180405), the Young Top Talent Support Program of Beihang University, and the Beijing Nova Program of Science and Technology (No. Z191100001119134).
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Design and experimental study of a new flapping wing rotor micro aerial vehicle
- CFD/CSD-based flutter prediction method for experimental models in a transonic wind tunnel with porous wall
- Prediction of pilot workload in helicopter landing after one engine failure
- Study of riblet drag reduction for an infinite span wing with different sweep angles
- Modulation of driving signals in flow control over an airfoil with synthetic jet
- Strong interactions of incident shock wave with boundary layer along compression corner