基于机载LiDAR点云数据的植被分类研究
2020-02-22李佳丽
李佳丽

摘 要:本文以某一区域地理国情监测中的植被和建筑物变化监测为工程背景,探讨了基于机载LiDAR点云数据的植被与建筑物提取方法,本文首先提出了整个技术流程,在此基础上,利用面向对象的分类方法,对某一年LiDAR点云的高程信息和首尾两次回波信息进行处理,从而得到该区域植被和建筑物监测情况,以期满足地理国情普查及监测信息的需要。
关键词:机载LIDAR 点云数据 植被 建筑物 提取
中图分类号:P237 文献标识码:A 文章编号:1674-098X(2020)10(a)-0138-03
Abstract: Based on the monitoring of vegetation and building changes in a region's geographical situation, this paper discusses the method of extracting vegetation and building based on airborne LiDAR point cloud data. Firstly, the paper puts forward the whole technical process. On this basis, using the object-oriented classification method, the elevation information and the first and last echo information of LiDAR point cloud in a certain year are processed in order to meet the needs of the general survey of geographical conditions and monitoring information, and the monitoring situation of vegetation and buildings in the region can be obtained.
Key Words: Airborne LiDAR; Point cloud data; Vegetation; Buildings; Extraction
近年來,高分辨率遥感影像一直是地理国情监测的重要数据源,但由于自然环境与遥感波谱之间关系的复杂性,提取的结果往往会受到地物阴影或“同谱异物”现象的干扰。机载激光扫描测高技术的出现,为地理国情要素普查与监测提供了新的数据源和方法,引起了测绘界的浓厚兴趣。
本文以某一区域地理国情监测中的植被和建筑物变化监测为例,利用面向对象的分类方法,对某一年LiDAR点云的高程信息和首尾两次回波信息进行处理,从而得到该区域植被和建筑物监测情况,以期满足地理国情普查及监测信息的需要。
1 研究方法
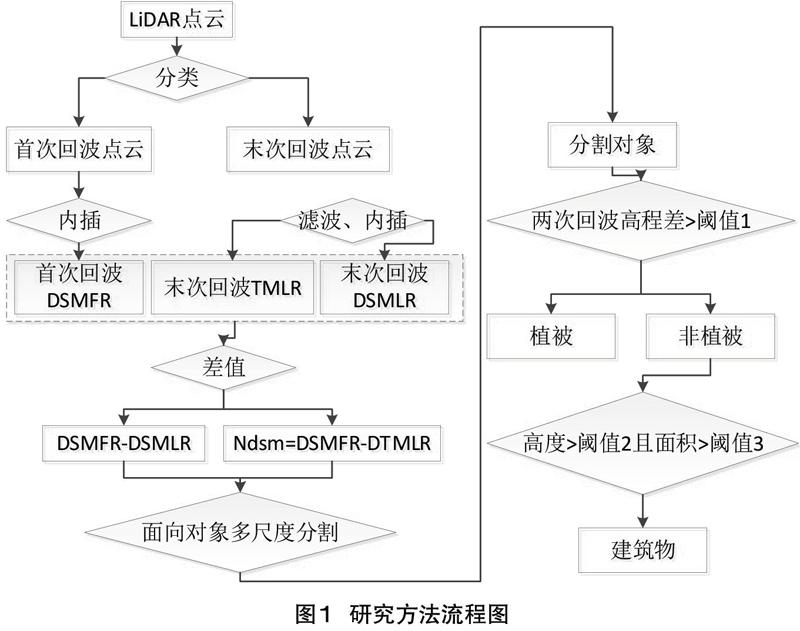
本文面向对象的机载LiDAR点云数据处理技术处理(见图1)。主要包括:(1)LiDAR 数据的预处理,首先通过滤波算法从末次回波点云中提取数字地形模型(DTM),再从首次回波点云生成的数字表面模型(DSMFR)中剔除DTM 影响,得到归一化数字表面模型(nDSM);将计算出的首尾两次回波点云生成的数字表面模型(其中首次回波高程模型为DSMFR,末次回波高程模型DSMLR)进行差值运算,得到对应激光脚点两次回波获得的高程之差(DSMFR-DSMLR);(2)利用多尺度分割算法对nDSM 和(DSMFR-DSMLR)进行分割。(3)在分割结果基础上先利用两次回波高程差区分出植被和非植被对象,然后在非植被对象中依据面积、高进行房屋建筑信息的提取。
1.1 LiDAR数据的预处理
首先要对LiDAR 点云数据进行滤波,此处采用不规则三角网迭代滤波算法从末次回波点云中将地面点提取出来;然后采用最近邻插值算法将首尾两次回波高程数据分别内插为数字表面模型DSMFR、DSMLR,再将滤波出的地面点插值为DTML R,分辨率统一设为2m,为了消除地形因素的影响,本文基于归一化数字表面模型进行处理,即将DSM与DTM进行差值处理,生成nDSM。由于机载LiDAR系统所发射的不是一条激光线而是具有一定发散角的波束,波束到达地面上会形成纵横向具有一定宽度的光斑,激光脉冲的部分光斑落到树叶上反射回去,而剩余的光斑则穿过植被枝叶的缝隙到达较低的部位或地面上,从而产生两次回波高程存在明显差异的情况。
通常,第一个回波DSMFR包含几乎所有功能,包括建筑物、植被、道路、桥梁、草地等。相反,最新回波DSMFR中包含的特征信息很少,尤其是缺乏有关植被的信息。因此,植被区域中的第一回波与最后一个回波之间的差异较大,而局部高程变化较小的道路或房屋屋顶等区域的高程差异则很小或接近于0。原则上,我们可以使用两个回波信号。高程数据可识别植被和其他特征。因此,比较由第一个和最后两个回波高程生成的DSMFR和DSMLR数字表面模型,以生成DSMFR-DSMLR。
1.2 面向对象多尺度分割算法
面向对象的机载LiDAR点云数据处理技术包括使用面向对象的分析方法以多尺度分割并提取预处理的光栅图像(nDSM,DSMFR-DSMLR)。面向对象的分析方法是将图像对象作为基本的图像分析单元,然后将对象的多空间特征值提取到图像对象单元中进行处理和分析,建立一个系统。图像对象是指在图像分割后生成的“同类”像素的集合,对象的属性包括颜色、大小、形状、结构、纹理、阴影和空间关系。该技术最关键的部分是图像分割,有许多成熟的图像分割算法。其中,使用最广泛的是基于边缘的分割和基于区域的分割。面向对象的分析方法使用基于区域的分割算法:多尺度分割算法。在本文中,我们选择了一种多尺度分割算法,将插值图像划分为多个对象。
多个级别的细分是增强区域增长的一种方法,这是面向对象的分析技术中最重要的部分。本文使用此算法对nDSM和DSMFR-DSMLR进行分段,以获得具有均质区域的对象。多尺度分割算法不仅考虑了LiDAR点云数据插值后图像中的亮度(海拔)信息,而且还考虑了几何信息的特征和空间关系。首先,将插值图像用作分割中涉及的波段,并计算该波段中亮度和几何异质性的积分特征值,然后根据两个特征值所占的权重计算加权值。具有相邻位置和相似属性的像素或对象将连续合并,直到内部亮度和新生成对象的几何异质性的组合加权值大于指定范围内的临界值为止。合并过程结束后,最终形成多个图像对象的多边形(对象内的异质性最小,相邻对象之间的异质性最大。
1.3 建筑物提取
在完成栅格图像的多尺度分割之后,必须对分割的多边形对象进行分类并提取信息。根据实验区域的特征和数据,用于提取建筑物的对象的属性包括图像灰度值(高程)、大小、形状、空间关系。首先,设置高程差阈值以对分割的多边形块进行分类,大于阈值的是植被,否则为非植被;然后根据最大区域和最大区域的面积,设置高度閾值,以根据该区域中建筑物(不包括非目标建筑物)的高度范围对分割的多边形块进行分类在该区域中最小的房屋建筑物进行第二次评估,过滤高度和面积与房屋建筑物一致的对象多边形。由于本文档中的高度计算基于nDSM而不是传统的DSM值,因此可以避免地面波动的影响。
2 试验结果与分析
该试验选用ISPRS网站公开的机载LiDAR点云数据为例,每个激光脚点都包含x、y、z坐标,点间距为1~1.5m。经过滤波、最近邻插值、归一化以及差值后生成2m 分辨率的栅格影像nDSM、DSMFR-DSML。
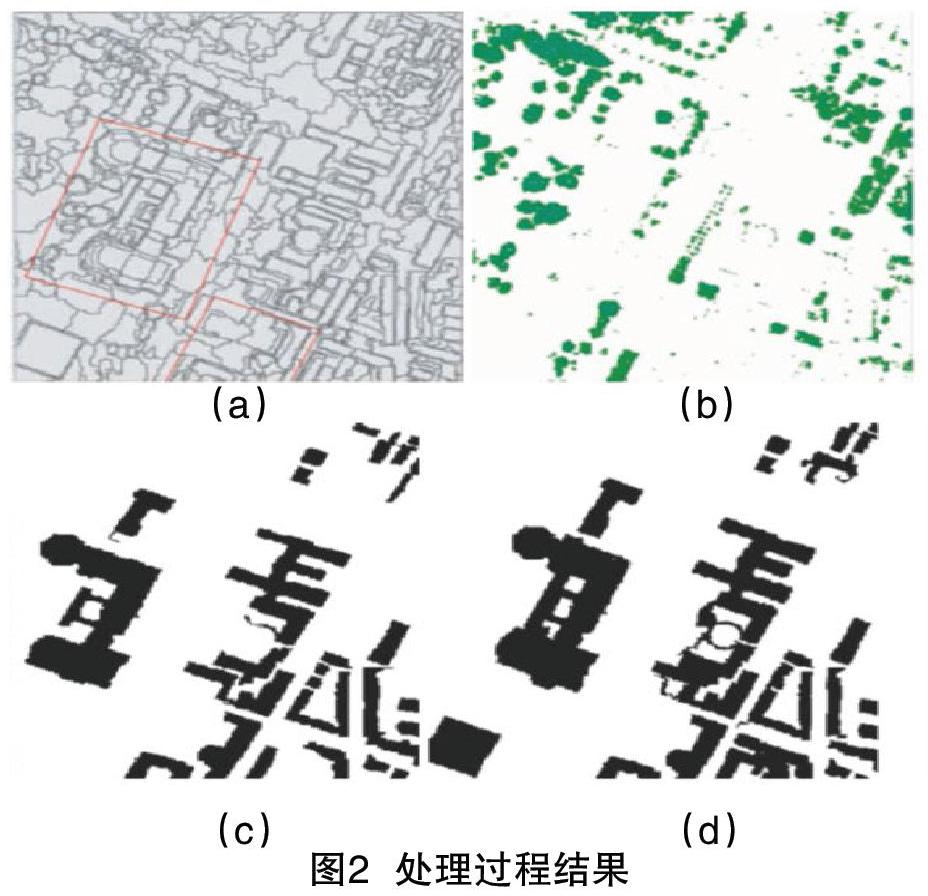
在Ecognition中对nDSM、DSMFR-DSMLR执行多尺度分割算法,分割参数设置为:分割尺度为5,波段权重为1∶1,形状权重为0.2,紧凑度为0.5,最终分割出713个对象,如图2(a)所示。
依据分割的结果,对植被和房屋建筑进行提取,依据实验区域地物的情况,首先设置首尾两次回波高程差阈值为0.3,高程差大于该阈值的为植被,否则为非植被;依据区域内建筑物的高度情况,设置高度阈值范围为8~60m,面积阈值为50~3000像素数,将非植被中高度面积在该范围内的作为房屋建筑对象提取出来。结果如图2(c)所示,可以看出较大部分房屋建筑信息被提取出来,低矮的植被或较高的异常点都被剔除出去,最后对提取的建筑物内部的小洞进行填充,填充依据八邻域关系进行增长。最终结果如图2(d)。
3 精度评价
植被和主体建筑物信息均被提取出来,提取结果基本准确,错分现象较少,完整度高,对象大小与影像中的实际地物目标轮廓相当,大小接近,相比较传统基于像元方法提取结果中存在的“椒盐”噪声、多尺度分割后提取的结果更符合人类的视觉要求。但是阈值是由于人工设置,不可避免地造成了一些地物的漏提或错提(见表1)。从表1中可以看出,本文的建筑物和植被提取生产精度、用户精度以及总体精度都可以达到80%以上。
4 结语
本文采用面向对象的分类方法对机载LiDAR点云数据进行了目标地物提取研究,对被研究区域植被与建筑物的分布情况进行了监测,探讨了面向对象的机载LiDAR点云数据处理技术在地理国情监测中的应用,为今后的地理国情监测工作累积了经验。
参考文献
[1] 李全荣.基于LiDAR回波强度数据的潮间带植被滤波方法[J].海洋测绘,2019(7):14-17.
[2] 郝长春.无人机载激光LiDAR在植被覆盖区大比例尺地形测绘中的应用分析[J].安徽建筑,2019(3):19-22.
[3] 李沛婷.荒漠植被区机载LiDAR点云生成DEM算法研究[D].石河子:石河子大学,2019.
[3] 郭鹏.基于机载LiDAR数据的农田区植被高度估测研究[J].干旱区地理,2017(11):1241-1247.
[4] 樊敬敬.基于机载LiDAR点云数据的城区植被与建筑物提取研究[D].徐州:中国矿业大学,2016.
[5] 刘润东.LiDAR-DP在广西多植被及陡石山DEM生产中的应用[J]. 地理空间信息,2018(12):104-106.
[6] 杨亚复.基于LIDAR技术的城市植被三维结构信息提取[J].科技资讯,2016(29):7-9.
