变桨距提高升力型垂直轴风力机性能研究综述
2020-02-19许应桥孙晓晶
许应桥,孙晓晶
(上海理工大学 能源与动力工程学院,上海 200093)
随着化石燃料的日益衰竭以及环境污染的不断加剧,寻找与开发清洁的可再生能源是当今人类所面临的一项刻不容缓的任务[1]。风能是一种可再生的清洁能源,其储量大、分布广。从20 世纪70 年代至今,世界范围内风能利用得到迅速发展,风力发电技术日趋成熟,然而与常规能源相比,风能的利用率仍然较低[2]。近些年,全球风力发电机的装机容量不断增加,从2004 年6 614 MW 到2015 年的433 GW,以平均每年1.2倍的速度增长。世界各国都把风力发电作为新能源开发的重点,并结合各自不同的国情出台了新的政策和措施以期进一步推动风能利用技术及其产业的发展。根据全球风能理事会预测,到2050年全球风力发电机的装机量将会达到3 545 GW[3]。
根据旋转轴的不同,风力发电机主要分为水平轴风力发电机和垂直轴风力发电机两类。图1为传统风力机的分类。图1(a)中水平轴风力发电机的旋转轴与来流风向平行,转速高,最大风能利用率可达50%,是当今风电市场上的主流机型。然而,水平轴风力机风轮直径较大,重心高,对塔柱和地基的强度要求高。此外,水平轴风力机还需借助尾翼或者偏航系统来使风轮可随风向的改变而转动,因而整体结构相对复杂,造价较高[4]。
垂直轴风力机的旋转轴与来流风向垂直,根据工作原理不同又可分为两类:升力型垂直轴风机[图1(b)]和阻力型垂直轴风力机[图1(c)]。与水平轴风力机相比,垂直轴风力机具有结构简单、安装维护方便、可以多向受风而不需要偏航装置等优点[5-6]。但垂直轴风力机的风能利用率较低,其最大风能利用率只能达到40%左右,且自启动能力差。这些问题是阻碍垂直轴风力机发展的主要制约因素。因此,如何改善垂直轴风力机的气动特性,提高其风能利用率,这些问题一直被研究人员长期关注。
近年来,各种流动控制方法逐渐应用在垂直轴风力机叶片上以抑制或减缓大攻角下翼型的动态失速现象,从而提高风力机翼型的升力及升阻比,进而提升风力机的捕风能力和输出功率。变桨距是目前最为常见的一种应用在升力型垂直轴风力机上的主动式控制方法。该方法尽管比较简单、廉价,但对提高垂直轴风力机的风能利用率非常有效。本文主要对目前应用在升力型垂直轴风力机上的变桨距控制方法的研究现状进行系统的总结和归纳,旨在发现该领域中有待解决的技术难点,以期为从事该研究的相关人员提供参考。
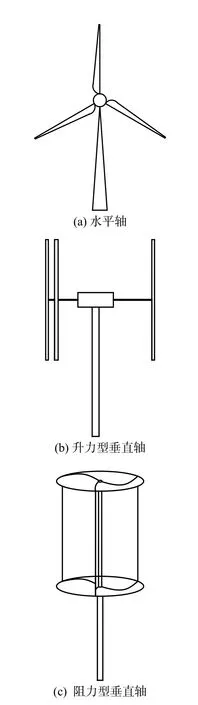
图1 传统风力机的分类Fig. 1 Classification of traditional wind turbine
1 升力型垂直轴风力机研究现状
随着风能的开发和利用,垂直轴风力发电机的相关技术也取得了显著的进步,越来越多的科研人员开始关注垂直轴风力机的气动特性。Tjiu等[7]对不同时期的达里厄型垂直轴风力机的特点进行了分析,指出了不同类型的达里厄型风力机的优缺点。与水平轴风力机相比,垂直轴风力机的研究起步较晚[8]。早期的垂直轴风力机的叶片普遍采用航空翼型,没有针对垂直轴风力机运行工况而设计的专有翼型。
近年来,很多学者致力于采用不同的方法来优化设计适用于垂直轴风力机的专用翼型。Chen等[9]对不同的垂直轴风力机翼型的设计方法进行归纳和总结,并提出新的垂直轴风力机翼型的优化思路。目前,垂直轴风力机翼型的设计大部分仍基于格朗特在1935 年为研究旋翼直升机应用所提出的叶素动量理论。然而,垂直轴风力机在实际运行过程中,其叶片与气流的相互作用使得叶轮周围的流场十分复杂。叶素动量理论仅适用于理论理想工况的计算,但这种计算方法并不准确。实验和数值模拟能精确地得到与实际相符的结果,所以实验和数值模拟逐渐成为现阶段垂直轴风力机气动性能研究的两种主要方法。
2 垂直轴风力机失速特性的研究
翼型作为风力机主要做功部件的基本单元,是风力机不可或缺的一部分,但其做功条件有限,在大攻角翼型表面容易产生流动分离,从而导致翼型失速。对于垂直轴风力机来说,风力机转子在旋转过程中其翼型攻角变化幅度很大,这将导致在有些相位角下翼型会由于攻角太大而发生失速,进而失去做功能力。
Hand 等[10]对NACA0018 失速特性进行了二维数值模拟,以翼型前缘1/3 处为旋转中心进行正负30°的俯仰运动,模拟垂直轴风力机翼型的动态失速特性。Kim 等[11]利用类似的方法研究了转子上游的大涡对垂直轴风力机气动性能的影响。
Almohammadi 等[12]利用转捩模型和k-ω SST模型对比研究垂直轴风力机的动态失速特性时发现,利用转捩模型计算得到的垂直轴风力机动态失速现象要比利用k-ω SST 模型计算得到的提前。Nobile 等[13]分别利用转捩模型、标准k-ω模型和标准k-ε模型模拟分析垂直轴风力机的失速特性,结果也表明利用转捩模型计算得到的结果的精潘确盼性等比[14]其对他旋两转个状模态型下的的高垂。直轴风力机和与非旋转状态下的垂直轴风力机的气动性能进行了对比,结果表明:旋转状态下的垂直轴风力机的输出扭矩要比非旋转状态下的理想;前缘涡和翼型表面剪切涡有助于翼型上表面生成低压区,从而获得额外升力。
Ferreira 等[15-16]利用粒子图像测速法对垂直轴风力机的动态失速进行了可视化测量,分析不同雷诺数和不同叶尖速比下垂直轴风力机的动态失速特性,并对比垂直轴风力机翼型在不同时刻的涡结构。粒子图像测速法能将垂直轴风力机的翼型表面涡脱落过程可视化,展现出更清晰的量化过程。相比于模拟,该方法的信服力较高。但粒子图像测速法只能分析翼型周围的局部流场,要检测输出转矩还需要配备其他检测设备。
3 提高升力型垂直轴风力机性能的变桨距控制方法
与水平轴风力机相比,自启动性能差和风能利用效率低是阻碍升力型垂直轴风力机发展的主要因素。为了进一步改善升力型垂直轴风力机的气动性能,提高其风能利用率,许多研究者提出了改进方法。目前这些方法主要分为两类:一类是对现有成熟翼型的气动特性进行详细的研究和对比,寻找能使垂直轴风力机获得更高风能利用率的翼型型号[17-19],或者开展升力型垂直轴风力机专用翼型的优化设计[20];另一类是采用主动和被动的流动控制方法抑制翼型表面的流动分离,改善垂直轴风力机叶片周围流场,提高风力机转矩特性。
对升力型垂直轴风力机叶片来说,翼型在攻角0°~15°均能产生升力。当攻角超过15°,叶片表面将产生动态失速,导致做功性能显著下降。传统的升力型垂直轴风力机的叶尖速比必须维持在4 以上,此时叶片攻角较小,才能保证叶片具有较好的气动性能和较高的捕风能力。而要在低叶尖速比下也能维持较好的气动性能,就要采用主动控制的方法减小叶片旋转到不同相位角处的攻角,以延缓其表面的流动分离。
变桨距技术是目前应用在升力型垂直轴风力机中最常见的一种控制方法:根据风速的变化及叶片旋转到不同位置,调节叶片的桨距角,改变叶片的攻角,减小叶片表面上的流动分离,从而改善叶片的气动性能,提高垂直轴风力机整体的输出功率。
3.1 变桨距垂直轴风力机的理论分析
目前比较成熟的用于升力型垂直轴风力机气动性能的理论预测方法主要有两种:第一是基于势流理论的涡方法;第二是基于动量理论的多流管模型。单盘面单流管模型相对简单,但是不能反映垂直轴风力机转子作用平面范围内上游区和下游区的流动参数变化。
为了解决这一问题,Paraschivoiu 等[20]提出了双盘面多流管模型。该模型在流管理论的基础上又将每个流管进一步细分为上游和下游两个盘面,可以实现上、下游两个盘面的不同性能分析。流管型简单快捷,便于工程应用,且双盘面多流管模型计算的结果比叶素动量理论的更为精确,因此目前理论研究中多采用双盘面多流管模型对风力机气动性能进行计算。此外,当风力机翼型为不对称或有安装角时,采用双盘面多流管模型对其气动性能进行计算可以得到更为精确的预测结果。
Jain 等[21]基于双盘面多流管模型计算并对比了不同叶片桨距角下垂直轴风力机风能利用率随叶尖速比变化曲线。与不采用变桨距控制的风力机相比,采用变桨距控制的风力机最高风能利用率可提高80%。
顾华朋等[22]提出新型自动变桨距式垂直轴风力发电系统结构,并探索了可显著提高翼型气动性能的变桨距控制方法,还通过计算流体力学(CFD)软件模拟计算了NACA0012 翼型在0~180°攻角范围内的升、阻力系数。利用翼型的升力系数并根据叶素动量理论分别计算变桨距和定桨距风力机单个翼型旋转一周产生的转矩系数。结果表明,变桨距风力机的转矩系数可比定桨距风力机的提高一倍左右,且变桨距式垂直轴风力机的自启性能也有一定的提高。
张立勋等[23]采用双盘面多流管模型对升力型垂直轴风力机进行了数学建模,以此方法计算单个翼型的气动力,并通过CFD 软件计算出不同桨距角下定桨距风力机的风能利用率。结果表明,变桨距控制下风力机与不同桨距角下的定桨距垂直轴风力机相比,其风能利用率有明显提高。
赵振宙等[24]基于双盘面多流管模型对传统的变桨距方式进行了改进。传统变桨距只对风力机翼型的相对相位角的大攻角进行改善,使大攻角在桨距角改变的情况下变小。赵振宙等[24]提出使相对相位角对应的小攻角在桨距角的改变下变大,大攻角在桨距角的改变下变小的想法,重点提高小攻角相对相位角区域翼型的气动性能。该方法扩大了风力机高性能的相对相位角的范围,在高叶尖速比下风力机的性能明显提高。
3.2 变桨距升力型垂直轴风力机的数值模拟
李健等[25]利用数值模拟方法计算了不同桨距角下垂直轴风力机的风能利用率。然而,他们仅对桨距角为正值时的风能利用率的变化规律进行了研究。埃因霍芬理工大学的Rezaeiha 等[26]采用数值模拟方法对比研究了升力型垂直轴风力机叶片桨距角β固定在-7°~3°之间不同角度时叶片的转矩系数。根据该方法可以得到不同桨距角下叶片输出转矩随其相位角变化的规律。当叶片旋转到不同相位角时,可以通过调整叶片的桨距角,使其保持较大的输出转矩,从而提高风力机的风能利用率。
加拿大学者Abdalrahman 等[27]提出了一种控制垂直轴风力机变桨距角变化的新理论,即多感神经网络方法,利用该方法能计算出不同工况下风力机的风能利用率。垂直轴风力机每个叶片在不同相位角下都有一个最佳桨距角,使其在各个相位角下的做功能力达到最大。Abdalrahman等利用多感神经网络PID 控制器来调整风力机叶片在不同相位角下的桨距角,进而使垂直轴风力机的风能利用率达到最大。与不加控制的垂直轴风力机风能利用率相比,该控制方法可将垂直轴风力机风能利用率提高25%左右。
张立勋等[28]利用多种用户定义函数方法对变桨距式垂直轴风力机的性能进行了分析,对比了变桨距和定桨距的垂直轴风力机在不同尖速比、雷诺数和风速下的风能利用率。结果表明,采用变桨距控制的垂直轴风力机的风能利用率得到较大提高,最大风能利用率提高了90%左右。
左薇等[29]采用Flow Vision HPC 软件对垂直轴风力机进行数值模拟,风力机的叶片采用NACA0022 翼型,并以该翼型的失速攻角为目标条件调节该风力机叶片桨距角的变化。与定桨距风力机功率系数相比,采用变桨距控制后的风力机功率系数提高了45%左右。
目前文献中对变桨距垂直轴风力机的CFD数值模拟多为二维计算,主要包括物理模型的建立、网格划分、求解器和后处理等步骤。但不同的研究者在模拟过程中控制风力机叶片变桨距的方法有所不同,主要可分为两种:①根据叶片的失速特性和气流对叶片的相对速度,确定叶片桨距角在转子旋转一周内的变化规律,通过自编程序(比如Fluent 软件中的程序编译UDF)在模拟过程中控制桨距角,使其能够随着翼型的相对位置的变化而变化;②分析不同定桨距角风力机的转矩系数在一个旋转周期内的不同变化规律,根据其规律确定在一个旋转周期内不同相位角下的最佳桨距角。该方法由于每个固定的桨距角都需对应一套计算网格,因此网格划分的工作量较大。
与传统的实验方法相比,计算机数值模拟方法可以节省大量的人力、物力和时间。但为了节省计算时间,大部分数值模拟都处在二维模拟研究阶段。二维模拟中假设叶片展长为无限长并忽略了叶尖效应、机械结构及一些控制机构之间的摩擦损耗,这样就导致数值结果与实验数据存在一定的误差。变桨距式升力型垂直轴风力机的结构较复杂,加工难度大,现阶段关于其实际运行情况的实验研究仍较少。然而,为了验证数值模拟计算结果的准确性,开展针对变桨距式升力型垂直轴风力机的实验研究非常必要。
3.3 变桨距垂直轴风力机的实验研究
Elkhoury 等[30]通过实验和三维数值模拟方法对变桨距垂直轴风力机的性能进行了研究。实验中采用如图2 所示的风力机模型。该模型中在距叶片前缘15%弦长左右处加装与偏心轮相接的连杆。该结构可使偏心轮随转子旋转带动叶片摆动,从而调整旋转过程中叶片桨距角的变化。模拟与实验研究结果均表明,采用变桨距控制后升力型垂直轴风力机在低叶尖速比下的风能利用率最高可以提升一倍左右。

图2 变桨距垂直轴风力机三维轴视图与俯视图[32]Fig. 2 Axonometric drawing and top view of variablepitch vertical axis wind turbine[32]
台湾国立大学Miau 等[31]团队采用多流管方法对变桨距垂直轴风力机的性能进行了计算,同时进行了实验测试。对风力机叶片的桨距角分别在-10°~10°和-70°~70°范围内的控制效果进行分析。他们发现:分别采取-70°~70、-10°~10°和定桨距混合式控制方式均可以使垂直轴风力机的风能利用率在各叶尖速比下得到一定的提高。
Benedict 等[32]对被动式变桨距控制的垂直轴风力机的气动特性进行了数值模拟和实验研究。该变桨距控制方法通过连杆和凸轮机构(如图3所示)实现风力机叶片在旋转过程中桨距角的变化,不需要安装额外的控制器,从而减少了能量的消耗。研究表明,采用这种变桨距结构的风力机在低雷诺数下的最大风能利用率可提高15%左右。
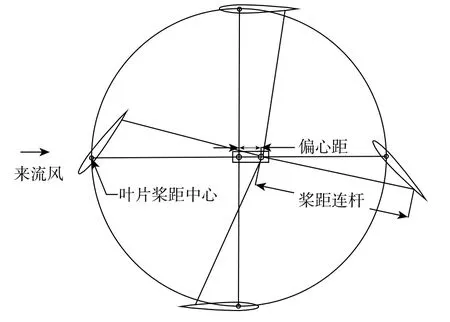
图 3 被动变桨距式风力机的结构示意图Fig. 3 Structure of passive-pitch wind turbine
Hwang 等[33]提出一种基于变桨距角的摆线式垂直轴风力机。与定桨距式垂直轴风力机输出功率对比发现,这种变桨距角的摆线式风力机的输出功率提高一倍左右。Kiwata 等[34]针对小型变桨距角垂直轴风力机进行了实验研究。实验结果表明,与定桨距式垂直轴风力机相比,采用变桨距控制后的垂直轴风力机的自启动能力得到提高,且其风能利用率提高22%左右。
4 讨论与总结
目前垂直轴风力机变桨距的控制方法按是否有额外功率的输入分为两种:被动式变桨距的控制方法和主动式变桨距的控制方法。
被动式变桨距的控制方法通过在风力机转子上添加一些辅助的机械结构来实现叶片在旋转过程中桨距角的变化。一些常见的辅助机械结构有凸轮连杆结构、弹簧结构、摆锤结构等。但这些辅助机械结构对连续性、强度、润滑性等要求较高。此外,这些附加结构只能使风力机叶片桨距角在一个较小范围内发生变化。因此被动式变桨距控制方法的控制效果不理想。
主动式变桨距的控制方法比较灵活,能使风力机叶片的桨距角根据风速变化产生相应的变化。叶片在旋转过程中处在不同相位角时都可维持较高的做功能力,因此可有效提高垂直轴风力机的输出功率系数。由于主动式控制方法需要额外功率的输入,因此主动式变桨距垂直轴风力机的风能利用率需将额外的输入功率计算在内。然而,目前大部分研究人员都没有对这部分能量进行定量计算。
众多研究结果表明,通过变桨距控制方法可有效改善垂直轴风力机的气动性能。然而,在自然环境下,由于风速和风向不断发生变化,要使风力机叶片的桨距角能够进行相应的调整,就需开发更加智能化的控制系统,所需要的机械与控制结构也将更为复杂。因此,目前变桨距控制垂直轴风力机技术仍多停留在理论研究阶段,而如何使这项技术的实际应用更加智能化、高效化仍需进一步探索。
