智轨电车液压转向系统动态响应特性研究
2020-02-18任晓军1虞鸿基旺1勇3王振海
任晓军1, 虞鸿基, 尤 旺1, 高 蕾, 刘 勇3, 王振海
(1.中车株洲电力机车研究所有限公司, 湖南 株洲 412000;2.北方国际合作股份有限公司, 北京 102249; 3.武汉华喜特种液压设备有限公司, 湖北 武汉 430000)
引言
由中车株洲电力机车研究所有限公司自主研制的智能轨道快运系统(Autonomous Rail Rapid Transist,ART)[1],采用一种全新的多编组胶轮车辆简称智轨电车,融合了有轨电车和道路巴士的优势,具有载客量大、基础建设成本低及运行灵活等特点,是未来城市轨道交通发展新的趋势[2-3]。
转向系统作为智轨电车核心组成部分,采用全轴液压转向控制技术[4-6], 各个转向车轴之间不需要机械连接,系统通过传感器获取第一轴转角,并结合车身姿态,实时计算各轴转角,通过控制比例伺服阀开口来控制转向油缸行程,实现各轴车轮与第一轴车轮相应的轨迹跟随。全液压转向系统作为智轨电车转向的重要驱动环节,其动态特性直接影响到整车的安全行驶[7]。目前,国内外对于公共交通、轨道交通领域多轴车辆液压转向系统的研究很少,主要集中在重型载货汽车及军用特种车辆等领域[8]。杨忠炯等[9]利用Simulink仿真软件研究了铰接运矿卡车液压动力转向系统的动态特性;VAN E C[10]对多轴车辆液压转向系统控制策略及稳定性进行了研究;黎鑫溢等[11]对加快多轴车辆电液比例转向系统随动响应速度的方法进行了分析;田阳阳[12]应用零偏角控制策略对电液比例转向系统的响应速度进行了分析;周军峰[13]应用MSC Easy软件研究了多轴车辆液压转向系统中液压缸总体积、系统压力和负载变化对动态特性的影响规律。研究者对车辆液压转向系统的研究多集中在控制策略及现有系统的动态特性等方面,而关键液压元件参数对车辆转向系统动态特性的影响很大。因此,对影响智轨电车液压转向系统动态特性的关键液压元件参数进行分析具有重要意义。
本研究基于AMESim首先建立了智轨电车液压转向系统模型,利用HCD液压库,对关键元件比例伺服阀进行了详细建模。通过仿真得到了液压系统带宽,并结合试验验证了仿真模型的准确性;在此基础上,根据理论分析改变仿真模型中伺服阀重叠量参数、液压缸的泄漏系数及蓄能器容积,研究其对液压转向系统动态特性的影响规律,从而为提高系统动态特性提供依据。
1 液压转向系统建模与试验验证
1.1 液压转向系统工作原理
如图1所示,智轨电车液压转向系统包括泵站、充压储能单元、比例伺服阀、转向油缸及电子控制单元,其中电子控制单元包括伺服控制器及各类传感器。液压转向油缸安装于车桥上,泵站及充压储能单元为系统提供液压油,压力油通过比例伺服阀驱动转向油缸,从而实现车轮转向。伺服控制器接收输入信号控制比例伺服阀开口度,同时油缸位移传感器检测油缸位移,反馈至输入端进行比较,形成闭环控制,实现对转向油缸位移方向和大小的高精度控制,从而满足液压转向系统响应的快速性、准确性及稳定性要求。

图1 智轨电车液压转向系统结构框图
1.2 系统建模与试验验证
根据智轨电车液压转向系统工作原理,搭建AMESim仿真模型,如图2所示。比例伺服阀作为核心控制元件,依据实际参数,利用AMESim中HCD模块对其进行了详细建模[14-16]。液压转向系统主要仿真参数按照实际转向系统参数进行设置,如表1所示。依据车辆满载时车桥最大载重要求,对转向油缸施加2 t的负载力,运行仿真得到转向系统仿真模型闭环Bode图,如图3所示。由图中可以看出转向系统的带宽为3.88 Hz,所谓系统的带宽,是指闭环系统的对数幅值不低于-3 dB时所对应的频率范围,其表征了系统响应的快速性[17]。
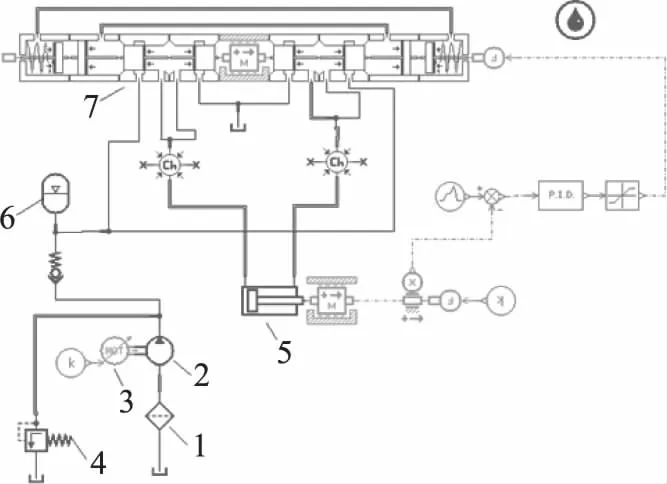
1.过滤器 2.齿轮泵 3.电动机 4.溢流阀 5.转向油缸 6.蓄能器 7.比例伺服阀图2 智轨电车液压转向系统AMESim仿真模型
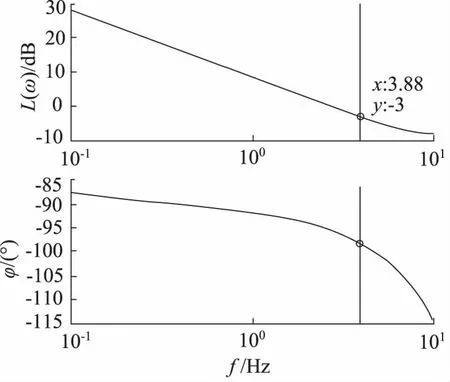
图3 仿真模型闭环Bode图

表1 仿真模型主要参数
为了验证仿真模型的准确性,通过图4所示液压转向试验台对系统带宽进行了测试。设置扫频区间为0.1~5.0 Hz,按对数等间隔分配方式,通过加载系统对车桥施加2 t负载力,采集30个频率点数据,得到智轨电车液压转向试验系统闭环Bode图,如图5所示,试验系统带宽测试结果为3.6 Hz,与仿真模型带宽3.88 Hz相比,相差0.28 Hz,一致程度较高,验证了AMESim仿真模型的有效性。

图4 智轨电车液压转向试验系统

图5 试验系统闭环伯德图
2 液压转向系统动态特性影响因素分析
智轨电车液压转向系统可以近似等效为阀控非对称缸位置伺服系统[18],其中比例伺服阀负载流量方程,线性化后可化简为:
qL=KqX-KppL
(1)
式中,Kq为阀在稳态工作点附近的流量增益;X为阀芯位移;Kp为阀在稳态工作点附近的压力流量系数;pL为负载压力。
液压缸流量连续性方程可化简为:
(2)
式中,Ct为液压缸泄漏系数;V为液压缸有效容积;βe为油液体积弹性模量;Am为平均活塞面积。
液压缸负载力平衡方程可化简为:
(3)
式中,m为负载质量;Bp为黏性阻尼系数;Ks为负载弹簧刚度;Fe为等效在活塞上的外负载。
由式(1)~式(3)可得到智轨电车液压转向系统位移闭环传递函数为:
(4)


Kt=Ct+Kp为总流量压力系数。
液压系统动态特性是指在收到信号之后,系统从初始状态到最终状态的响应过程,主要体现在两个方面:一个方面是系统稳定性,另一个方面是执行机构的响应品质和响应速度。根据式(4)可知,智轨电车液压转向系统中,影响系统动态特性的因素较多。其中,比例伺服阀作为核心元件,成本比重大,其零位重叠量对阀芯位移X影响较大,从而对系统动态特性有一定影响;智轨电车在实际运营当中,执行元件转向油缸可能发生油液泄漏现象,造成液压缸泄漏系数Ct改变,从而对系统动态特性也会产生一定影响;此外,在设计液压转向系统时,为降低整车噪声,提高舒适度,选择排量较小的齿轮泵作为压力源,需要考虑配置蓄能器作为辅助动力源,其具有存储能量、吸收液压冲击和消除压力脉动的作用,直接影响到值Kp,pL,同样会对系统动态特性产生一定影响。因此,本研究以比例伺服阀零位重叠量、油缸泄漏系数和蓄能器配置作为设计变量,开展液压系统动态响应特性仿真分析,探究3个参数对转向系统动态性能的影响规律。
2.1 比例伺服阀零位重叠量影响分析
比例伺服阀零位重叠量是指阀芯处于零位时,固定节流边与可动节流棱边之间的相对轴向位置关系,可分为零重叠、正重叠及负重叠3种[19]。比例伺服阀流量与阀芯开口度成正比,对于具有正重叠量的比例伺服阀,其输入电流必须大于一定值,阀芯通过重叠区域,才会有流量输出;而负重叠滑阀具有较大的零位泄漏,因此具有较高的流量增益。
在AMESim仿真过程中,设置比例伺服阀零位重叠量为全局变量,阀口最大开度为0.5 mm,重叠量范围为-0.04~0.04 mm,每隔0.02 mm取值,设置5组仿真模型,输入信号设置为阶梯斜坡信号,如图6所示。运行仿真,批处理得到不同重叠量对应的系统跟随曲线及转向油缸位移误差曲线如图7、图8所示。
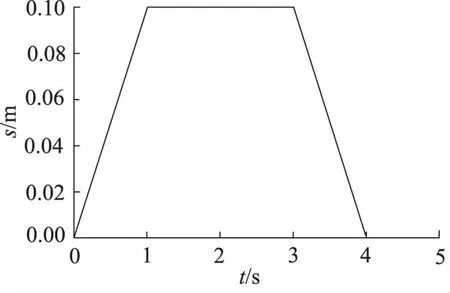
图6 转向油缸期望位移曲线
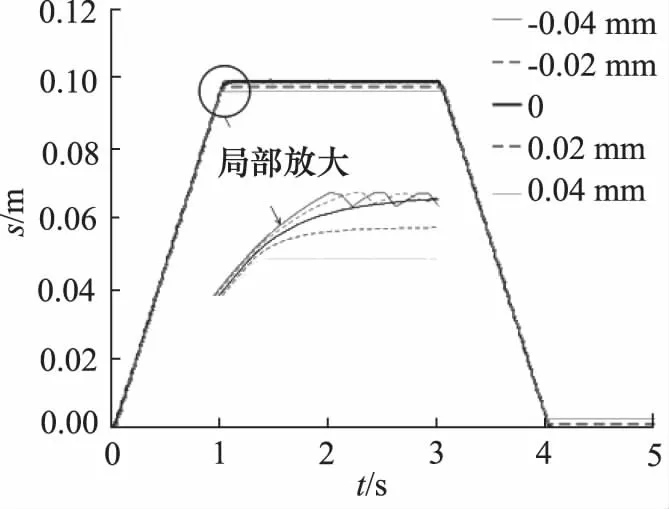
图7 不同重叠量对应油缸位移曲线
由图7、图8可知,当比例伺服阀为负重叠时,系统响应很快,跟随误差较小,随着负重叠量增大,系统开始出现超调甚至振荡现象,稳定性变差。当比例伺服阀由零重叠逐渐过渡到正重叠时,系统响应速度变慢,跟随误差增大,当重叠量在0.04 mm时,在1 s处,最大误差达到0.0045 m,且无法达到期望位移值,但系统稳定性好,对提高转向系统平稳性有一定作用。因此,在进行液压转向系统设计时,比例伺服阀重叠量的选取对系统动态特性具有重要影响,比例伺服阀为零重叠时,最大跟随误差为0.0036 mm,可达到实际位移值,且无振荡现象,具有最佳的综合动态特性。
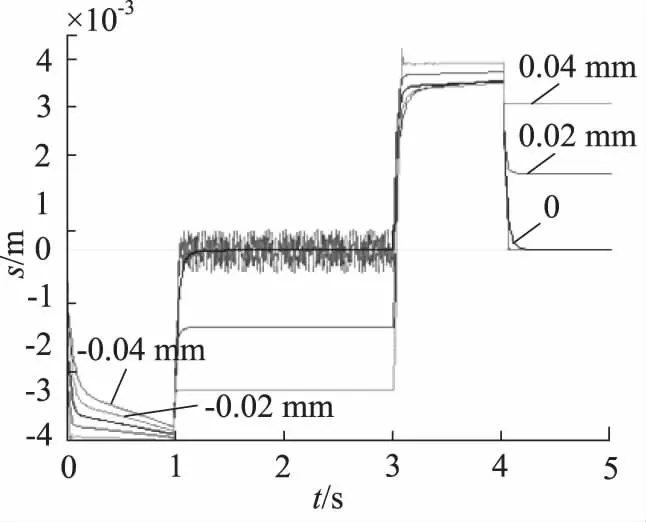
图8 不同重叠量对应位移跟随误差曲线
2.2 转向油缸泄漏系数影响分析
在智轨电车运行中,转向油缸作为液压执行元件,其性能直接影响转向系统的动态特性。转向油缸最为常见的故障为泄漏故障,分为内泄漏与外泄漏,其主要原因为油缸活塞两侧压力差存在、缸筒和活塞同轴度差、油缸磨损严重及密封件失效等。在AMESim仿真过程中,设置转向油缸泄漏系数为单一变量,分别为0, 0.5,1 L/(min·MPa),设置输入信号幅值为0.1的阶跃信号,对系统进行仿真研究,仿真结果如图9所示。
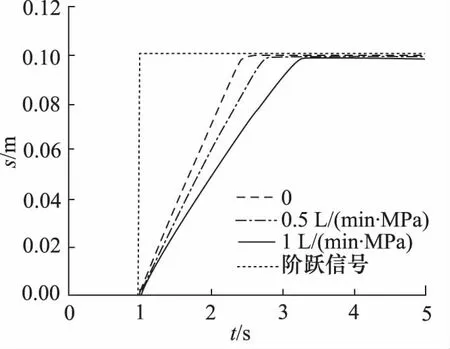
图9 不同泄漏量对应转向油缸位移曲线
从图9中可以明显发现,随着油缸泄漏系数的增加,转向油缸响应时间滞后逐渐严重,在泄漏系数为1 L/(min·MPa)时达到峰值所需时间为2.2 s,同时泄漏系数越大,响应精度也越差,泄漏系数为1 L/(min·MPa)时实际输出位移为0.097 m,出现了转向油缸无法达到期望位移的现象。由此可见,智轨电车转向系统对转向油缸泄漏故障较为敏感,油缸无泄漏时转向系统具有较佳的动态特性。因此,需要定期检修更换密封件,同时应特别注意油液清洁度要求,防止油液污染造成油缸磨损而加剧泄漏。
2.3 蓄能器容积影响分析
蓄能器的功用主要是储存油液的压力能,在液压系统中常作为辅助能源在短时间内供应大量压力油液,同时能在泵停转的时候维持一定的系统压力。此外,蓄能器能吸收泵启停、换向阀换向或液压缸停止运动时造成的压力冲击。基于此,在AMESim仿真中通过配置蓄能器容积及取消蓄能器,研究其对转向系统动态特性的影响。根据蓄能器选型手册,设置蓄能器容积为0.4, 1, 1.6, 2 L,根据系统工作压力要求,设置蓄能器气体预充压力为7 MPa,最高工作压力为16 MPa。输入信号为幅值0.1的阶跃信号,运行仿真,结果如图10、图11所示。
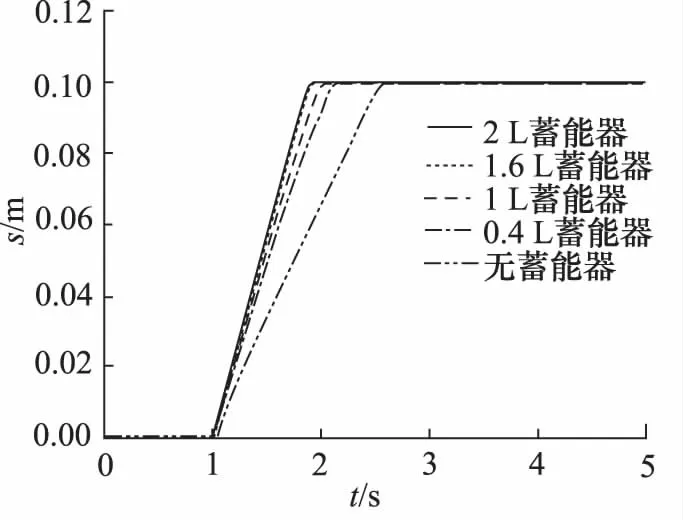
图10 有无蓄能器对应泵对应转向油缸位移曲线
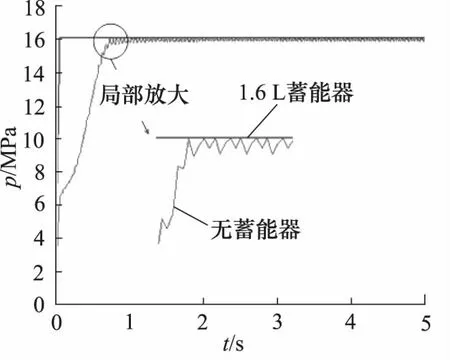
图11 有无蓄能器对应泵出口压力变化曲线
由图10可以很明显地看出,增加蓄能器后,可以瞬时提供较大流量,提高系统响应速度,当蓄能器容积逐渐增大,响应速度也随之提高,当容积增大到2 L时,响应速度增加不明显,与不配置蓄能器相比,达到峰值的响应时间提高了约1 s。因此蓄能器容积不能过大,避免浪费有效容积,同时需要考虑安装空间的限制。选择蓄能器容积为1.6 L时,液压转向系统有较佳的动态性能。
此外,由图11可以看出,系统不配置蓄能器时,泵出口会有明显的压力波动。增加蓄能器后,其不仅作为辅助能源供油,同时还能吸收泵出口压力波动,减小压力冲击,延长液压转向系统使用寿命。
3 结论
本研究建立了智轨电车液压转向系统AMESim仿真模型,得到系统带宽为3.88 Hz,并结合试验验证了模型的可信度。结合理论分析与仿真研究,可以得出如下结论:
(1) 比例伺服为正重叠量时,系统响应速度较慢,但跟随精度好,响应平稳;负重叠量时,系统响应速度快,但跟随精度差,过大的负重叠量会使响应曲线出现较大的振荡。伺服阀为零重叠时,液压转向系统具有较佳的动态响应特性。因此,比例伺服阀重叠量的合理选取对转向系统设计具有重要意义;
(2) 液压缸泄漏量越大,系统响应速度越慢,控制精度越差。在智轨电车运营中,应重视油液清洁度,并对转向油缸进行定期检查,更换密封件;
(3) 蓄能器的合理配置能有效提高液压转向系统的响应速度及稳定性,蓄能器容积为1.6 L时,液压转向系统具有较佳的动态响应特性。
研究结果对智轨电车液压转向系统优化设计及维护保养具有一定的指导借鉴意义。
