智能轨道列车综述
2021-03-19中车长春轨道客车股份有限公司国家轨道客车系统集成工程技术研究中心陆海英
中车长春轨道客车股份有限公司 国家轨道客车系统集成工程技术研究中心 陆海英
西南交通大学 丁铁成 杨 岗
为了更好地推广智能轨道列车,文章通过文献资料整理,综述了目前智能轨道列车相关研究内容。首先,文章整理了智轨列车参数,并且将智轨列车参数与地铁,有轨电车的参数进行对比;其次,分析智轨列车的优缺点;最后从适应性分析、转向系统、自动循迹、智能优化四个方面整理了智轨列车的研究进展。
为了促进城市公共交通发展,缓解城市运输压力,中车株洲所自主研发了智能轨道快运系统ART(Autonomous rail Rapid Transit,以下称“智轨列车”)。该系统2010年首次提出概念,2011年实现仿真平搭建,2016年底完成了工程样车的研制,2018年顺利通过了三个月的试运行阶段,目前在宜宾市,哈尔滨市,韶山市等多个城市投入实际运行。智轨列车是融合了现代有轨列车和公共汽车各自优势的新型交通工具,其不需要传统轨道交通使用的铁轨,能够在既有城市公路上正常运行。
1 智轨列车参数
智轨列车为100%低地板车辆,车辆物理尺寸:长度31640 mm,宽度2650 mm,车门间距9.06 m。车辆主要性能参数:设计结构速度为80 km/h,最高运行速度为70 km/h;正线能适应最小平面曲线半径20 m的路段条件;最大爬坡能力130‰;最大车速直行动态偏差0.15 m,转弯最大动态偏差0.35 m,最大载客人数307人。
为了便于直观了解智轨列车相关参数,下面将智轨列车与地铁,有轨列车进行比较,具体如表1所示。
根据表1可以看出,智轨列车主要承担中运量的运输,在爬坡能力以及最小转弯半径上更有优势。同时,智轨列车为双车头设计,不需要掉头即可反向运行,运行更为灵活,能够很好地适应城市路段。
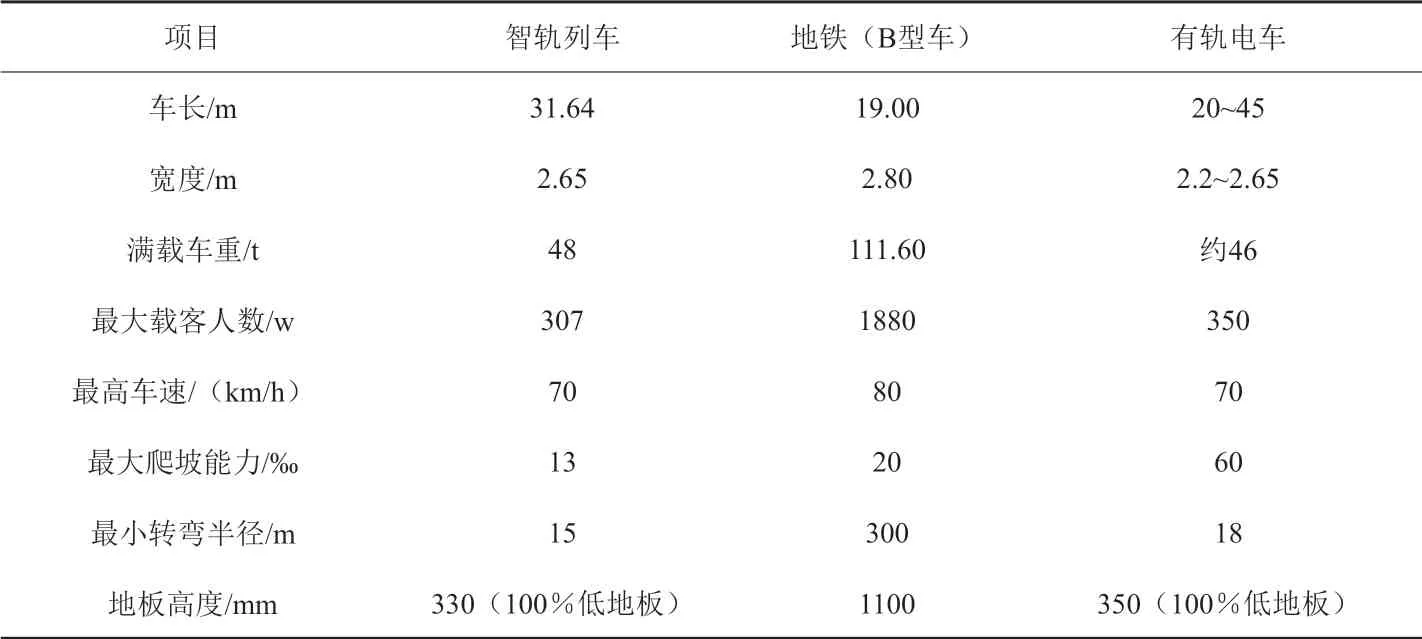
表1 智轨列车、地铁(B型车)以及有轨列车参数表
2 智轨列车优缺点分析
2.1 优点分析
(1)资金投入成本低
无需铺设钢轨,对于原本道路建设改变小;整车车辆小,单轴承承载低,无需对既有路面和桥梁进行结构加强;可借助现有的道路交通管理系统,无需大批量改造运输道路的信号系统;纯电动车,不需要像传统电车一样铺设电网,节省了供电网络建设成本。
(2)运行能耗低
智轨列车采用的是株洲所自主研发的永磁牵引控制技术,该牵引系统的电机额定功率达到98%。同时智轨列车使用超级电容,是纯电动车,首末站充电,单次充电只需要10 min,可满载行驶25 km。
(3)基础建设周期短
智轨列车的路面建设主要为绘制店面标志线,不需要铺设钢轨铺设;智轨列车路线建设可以借用城市现有道路运营,缩短了道路规划,拆迁和建设周期。
(4)运营灵活
智轨列车采用共享路权方式,运营线路布置灵活;转弯半径小,双向行驶无需掉头,可以适应老城区相对狭窄的道路;可实现自动驾驶,半自动驾驶。
2.2 缺点分析
(1)运量较低
智轨列车列车的运量为中等水平,实现大运量运输较为吃力,难以应对突发性客流。
(2)易引发突发事故
智轨列车无独立路权,极易受社会车辆干扰,引发不必要的安全事故;占用大量的道路资源,可能会影响社会车辆交通运输;同时自动驾驶技术还未完全成熟,稳定性有待于提高。
(3)不确定性高
智轨列车作为新型交通方式,管理以及应急方案不够完善,相应的运行制度规章还有待完善。
3 智轨列车研究进展
3.1 适应性分析
由于智轨列车是一种新型交通工具,至试行至今不过1年多时间,运营管理,线路规划,交通组织没有案例可供参考,还处于探索阶段。因此,智轨列车的适应性分析研究对于其发展有着重要意义。
赵帅综合分析智轨列车系统特点,结合株洲智轨列车实际工程,对智轨列车的关键技术方案进行了分析研究。蒋小晴等以宜宾市智轨列车线路为背景,详细阐述了智轨列车在线路规划,设计施工,交通组织,运营方面的探索结果,为后续智轨列车提供可参考复制的工程案例。明小松对智轨列车在大城市,中小城市,景区园区进行了不同功能定位,提出了智轨列车系统的规划思路。冷怡霖基于智轨列车市场经营现状,针对智轨列车市场营销,通过SWOT分析智轨列车优缺点和调查问卷方式分析运输需求以及消费者需要,为智轨列车市场推广提供了建议。黄爱萍等人结合轨道交通和道路交通相关安全标准,通过事故严重度,事故暴露概率和避免伤害3个方面阐述了智轨列车安全完整性等级的判定和定量计算依据,进而确定了智轨列车安全相关功能的安全完整性等级。
3.2 转向系统
智轨列车是一种多节编组、全轴转向的新型交通工具,它有别于由轮轨导向的传统轨道车辆,其完全依靠自身的全轴转向系统实现在常规道路上转向运行,因此转向系统是智轨列车的核心研究内容之一。根据目前的文献,转向系统的优化方法主要有开发试验平台;优化关键部件;系统仿真分析。
(1)开发试验平台
牛慧峰等人针对智轨列车电液伺服转向系统的动态特性测试问题,开发设计出具有针对性的动态测试试验台,模拟智轨列车在pid闭环控制下转向工况,为转向系统性能改进提供了数据支撑。张晓基于该平台,通过Adams和AMEsim的联合仿真分析改善了智轨列车的转向系统;佟祥伟以该平台为依托,基于虚拟仪器技术,开发设计智轨列车的转向系统动态特性的测试控制系统,从而分析得到智轨列车转向系统的动态特性指标。
(2)优化关键部件
董鸣勇等人设计出一种智轨列车转向架的导向装置,该装置通过放置在上支架和下支架用于调整定位轮和轨道之间间隙的调整块,实现导向装置精准定位,提高智轨列车运行的安全性能。夏云等人设计出具有缓冲功能的智轨列车转向架,缓解了运行过程中的线路不平顺产生的振动影响,减少运行时机车各部件的冲击影响,使得各轴之间载荷均匀,提高了智轨列车运行稳定性。李有坤等人设计出一种智轨列车车轮转向角度的测量方法与测量装置,能够实现快速的角度测量和角度校准,进而指引改善车辆行驶过程中出现跑偏,甩尾及双向驾驶性能不一致等问题。
(3)系统仿真分析
黄松等人针对智轨列车全轴转向冗余控制需求,提出一种基于油缸位置的闭环控制策略,并且通过Matlab建模和ADAMS仿真验证了所建模型准确性。任晓君等人利用AMESim建立智轨列车的液压转向系统的仿真模型,通过该模型进行仿真分析得出伺服阀为零重叠,液压缸无泄漏且蓄能器容积为1.6 L时,液压转向系统具有较佳的动态响应特性。
3.3 自动循迹
智轨列车与社会车辆在同一道路上共同运行,如果采用人工驾驶方式,控制精度偏低,而且更容易因操作失误而导致车辆偏离,引发交通事故。因此,提高智轨列车自动循迹精度,降低横向偏差,具有重要的现实意义。
石阳阳等人设计出一种智轨列车的循迹方法,该方法可以获取智轨列车待行驶区域的图像信息和识别所述图像信息中的目标地面警示装置的标志信息。彭京等人分析轨迹跟踪控制原理,建立智轨列车转向系统模型,并且通过仿真分析,验证了该系统能满足车辆在转向过程中的响应速度及轨迹跟踪精度要求。袁希文等人提出一种基于深度学习的车道线识别和数字虚拟轨道生成算法,根据智轨列车特点,通过PID控制发和MPC控制法降低了智轨列车高速行驶时横向偏差,提高了自动循迹控制水平。
3.4 智能优化
智轨列车要实现更全面推广,彻底与城市交通系统融合,离不开智能优化的过程,智能优化过程也是提高运行自动化,乘坐便捷性的过程,对于智轨列车发展有着长远意义。
陈杨等人提出了智轨列车乘客信息系统和广播系统融合的PIS系统方案,在人机界面,接口,业务功能等方面实现深度融合,减少了硬件的投入,降低了运营成本,实现了数据融合,提高系统自动化程度。陈录超等人对智轨列车低电压配电和数据采集系统进行研究,采用网络化,模块化设计思路,实现了智轨列车对负载电源的智能控制和信息管理,提升了列车智能化。熊凯等人提出一种基于模块复用技术的乘客信息系统信息生成方法,解决了智轨列车在多线路复杂模式下乘客信息生成问题。
结语:智轨列车作为新型的轨道交通工具,对于我国不同种类的大城市具有广泛的适应性,其可以作为解决三四线城市拥堵的一种解决方案,又可以作为作为一二线城市交通出行工具的补充。智轨列车由于其资金投入低、能耗低、建设周期短、运营灵活等优点,符合国家公共交通发展战略,是一种值得提倡推广的交通出行方式,但其也存在运量低、易引发事故、不确定性高等缺点,离技术完全成熟还有一段时间。目前针对智轨列车的相应研究也在不断进行,包括促进智轨列车与城市融合的适应性分析,提高运行稳定性的转向系统研究,保障运行安全性的自动循迹功能开发,提高乘坐便捷性的列车智能优化。相信在不久的未来智轨列车会继续快速发展,使中国城市交通系统更加全面完善。
