一种水下模拟载荷的设计与工作原理
2020-02-14刘贺军蒋龙杰
刘贺军 蒋龙杰
摘 要:本文主要研究了一种水下模拟载荷装置,该装置采用模块化设计,可以实现延时启动,通过自身搭载和释放抛载,最终可以实现水面回收。
关键词:模块化;延时;抛载
1 系统组成
基于模块化设计思想,模拟载荷可以分为主体结构模块、动力推进模块、功能模块和能源控制模块四个主要部分。
主体结构模块主要包含1个独立密封舱段,材料选用PVC材料,相对密度在1.4(1.2-1.7)左右。密封舱两端采用铝制端盖,端盖与密封舱之间利用O型圈密封。动力推进模块包含螺旋桨和直流电机。功能模块包含抛载系统(利用电磁铁吸附和释放重物)和感知系统(压力传感器和深度计)。能源控制模块包含能源电池和主控部分(电路设计、程序写入)。
2 工作原理
当模拟载荷系统中压力传感器检测到发射舱内压力增大到之前设置的阈值,且满足延时条件后,启动推进系统,电机开始工作,螺旋桨转动产生推力,模拟载荷开始运动出筒;载荷运动一定时间后,抛载系统抛出重物块,满足一定时间条件后,螺旋桨停车,模拟载荷利用自身浮力向上运动,达到水面后,回收模拟载荷。
3 主要设计要点
3.1主尺度
模拟载荷的长度为2000mm,直径为177mm,质量为40kg,排水量为40kg。
3.2推进方式选择
水下常见的推进方式有螺旋桨推进器和以负排量泵,如轴流泵、混流泵为核心的喷水推进器,喷水推进利用喷射管喷出的高速水流的反作用提供推力。考虑到实际情况及安装要求,由于模拟载荷在发射筒中速度较低,考虑到推进效率,选用螺旋桨推进方式。
3.3阻力计算
3.4浮力计算
设计模拟载荷浮力与重力之差为0,使模拟载荷可以悬浮在水中。
3.5抛载系统
现有水下释放工具的驱动方式主要为爆破式、电机式和电磁铁式。爆破式释放机构通常采用爆炸螺栓,不可重复利用,且危险性较高;电机式释放机构通常采用力矩电机,结构复杂,对水密性要求较高[2];因此本文采用以电磁铁为核心设计水下模拟搭载装置的释放机构。
对电磁铁选型时主要考虑以下参数:
(1) 电磁铁外形尺寸(长、宽、高);
(2) 电磁铁行程大小、吸附力大小;
(3) 供电电源类型、电源电压大小、电流特性;
(4) 最长通电时间、连续两次通电之间最短时间间隔。
设计释放机构时按照以下思路:
(1) 安装方便;连接压载块与释放单元时只需一个动作,限位机构触发,实现自锁。
(2) 未通电状态下有一个吸力,维持释放机构锁住压载块,在通电状态下,这个吸力消失,释放机构释放压载块,降低能耗。
通电率是电磁铁一个比较重要的参数,通电率即通电时间除以一个周期的时间,通电率的通俗叫法为占空比。本文中所述释放机构不需要电磁铁不间断的上电工作,只需电磁铁一次可靠上电即可完成释放任务,因此对通电率的要求不高,现有电磁铁的技术参数完全可以满足要求。
为降低装置功耗,本文选用吸盘式失电电磁铁,该种电磁铁使用與上电式电磁铁相反的工作方式:失电状态下,电磁铁能够对磁性材料产生吸引力;当给电磁铁线圈通以与内置永久磁铁固有磁力极性相反的电流时,吸力相互抵消使电磁铁整体表现为不产生吸引力;当给电磁铁线圈通以与内置永久磁铁固有磁力极性相同的电流时,吸力相互增强,产生更大的吸引力。
在安装抛载压载铁时,电磁铁吸附位置必须处于压载铁的中心位置,保证吸附力与压载铁的重力在同一条直线上,否则会使电磁铁与重物接触面之间存在切向力,导致电磁铁不能达到最大吸附力。同时还应注意电磁铁与重物接触面的平整光洁,减小两者之间的气隙,使电磁铁吸附力达到最大。
3.6供电系统
能源选择锂电池组,具体参数如下:
1)输出电压:标称电压DC14.4V,输出电压范围11.2V~16.8V;
2)最大工作电流:≥20A;
3)标称容量:≥40.8AH(能量转换效率,90%);
4)体积:≤¢125×200mm;
5)重量:4kg±1kg(参考值);
6)放电工作温度:-10~+55℃;
7)充电工作温度:0~+50℃;
8)充电时间:≤4.5小时。
3.7控制模块硬件设计
控制模块不仅控制电磁铁通断电以释放压载铁,而且读取深度传感器的数据,控制水下推进器电机的工作。本文采用模块以stm32单片机为主控芯片设计的外围电路,最小系统确保了单片机的基本功能。
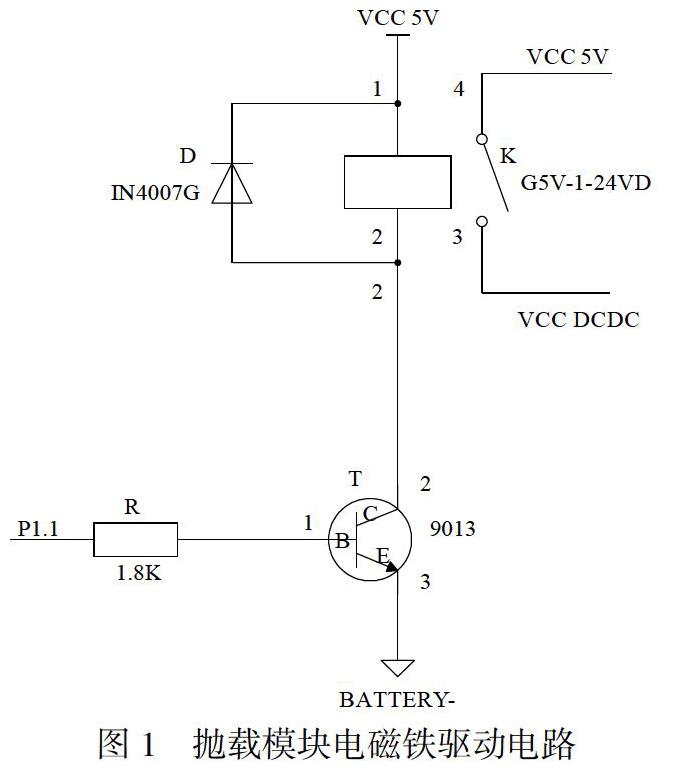
电磁铁驱动电路如图1所示,电磁铁驱动电路由三极管 9013、电磁继电器 G5V-1-24VD、1.8K 电阻和二极管 IN4007G 组成。当单片机 P1.1 口输出高电平,三极管 9013 导通,VCC_5V 对继电器供电,继电器线圈通电产生磁力吸引簧片 K2 导通,电磁铁通电,释放机构动作;当 P1.1 输出低电平,三极管 9013 截止,继电器断电,继电器内部线圈失电,K 断开,电磁铁断电,释放机构不动作。继电器内部线圈断电时会产生反复震荡的感应电流,加入二极管 SS14 可以加速线圈电流的单向释放,提高释放机构动作的可靠性。
4 总结
为了满足水下模拟载荷的实际应用,本文在分析国内外水下搭载和释放技术的基础上研制了一种水下模拟载荷装置,该装置能够通过功能模块感知外部环境,实现延时启动,并能通过抛载系统实现自身的回收,从而提高了水下模拟载荷的工作能力。
参考文献
[1] 刘愉强等。潜标系统静态力学分析计算及其应用程序开发[J]。海洋技术,2010,29(3)。
[2] 黄寿康。面向AUV的水下模拟搭载装置研制[D]。武汉:华中科技大学,2015.