基于视觉的工业机器人自动焊接引导分析
2020-02-14郭英豪
郭英豪
摘 要:随着社会的快速发展,焊接技术在加工制作行业中的应用越来越广泛,但是由于焊接技术的长时间作业会对人体造成一定程度的损伤,所以在现代加工制造业的发展过程中,工业机器人的使用成为我国焊接自动化的一个重要研究方向。文章通过对图像坐标系的构建,重点研究了增强图像的办法,并以此为基础为视觉图像进行边缘检测以及特征提取与匹配,从而输出相关有效数据,为基于视觉的自动焊接技术提供了技术研究方向和方法论支持。
关键词:工业机器人;自动焊接;视觉图像
中图分类号:TP242.2 文献标志码:A 文章编号:2095-2945(2020)01-0110-02
Abstract: With the rapid development of society, welding technology is more and more widely used in the processing and manufacturing industry, but the long-time operation of welding technology will cause a certain degree of damage to the human body, so in the development of modern processing and manufacturing industry, the use of industrial robots has become an important research direction of welding automation in our country. Through the construction of the image coordinate system, this paper focuses on the method of enhancing the image, and on this basis, edge detection and feature extraction and matching are conducted for the visual image, so as to output relevant effective data. This provides technical research direction and methodology support for vision-based automatic welding technology.
Keywords: industrial robot; automatic welding; visual image
引言
關于焊接技术的自动化发展,目前我们重点应该解决的问题是焊缝跟踪引导方面的不足。此次研究通过对视觉识别原理的探究,将焊接物体进行图像处理,从而对焊缝的大小形状进行识别分析,通过数据的计算将其转为工业机器人的目标位置,实现焊接自动化的目标,使得长时间的焊接作业可以被工业机器人所替代。
1 焊接自动引导模型
目前,自动焊接主要有三种自动引导模型,分别如下:(1)在焊接时,被焊接的物体呈静止状态,焊枪则根据焊缝的位置变化进行运动焊接,这也是现下最为常见的一种人工焊接模式。(2)在焊接时,焊枪处于静止状态,焊接的物体则根据焊接的情况改变位置来对焊缝进行焊接,这种方法一般适用于物体较小但焊缝不在同一水平面上的焊接。(3)在焊接时,焊接的物体和焊枪均处于运动状态,此种方法适用于异形焊接和面积较大的焊接。
这三种模型通过外加视觉都可以实现焊接自动引导,具体可根据视觉相机的位置分成两种。(1)将相机架放在焊接物体附近的指定位置,然后在焊接过程中保持原有位置和姿势不变,此种方式更加适合体积较小或易于焊接的物件。(2)将相机架放置在机器人的尾端关节位置,让它和机器人的关节之间形成联动,然后根据焊接的需要不断变换位置。此种方法在视觉提取应用里较为常见,其使用起来也更加灵活。
2 视觉空间坐标构建与标定
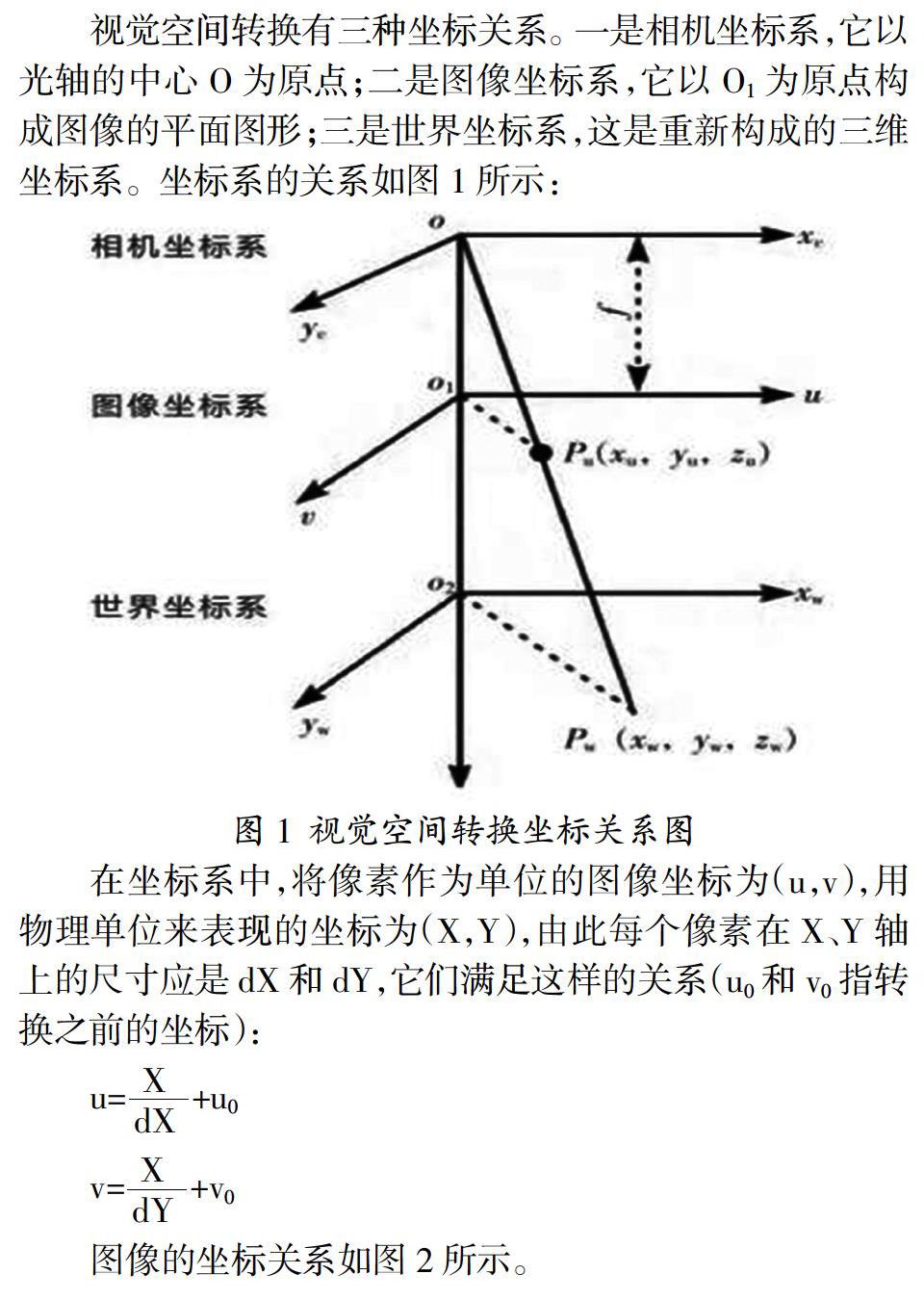
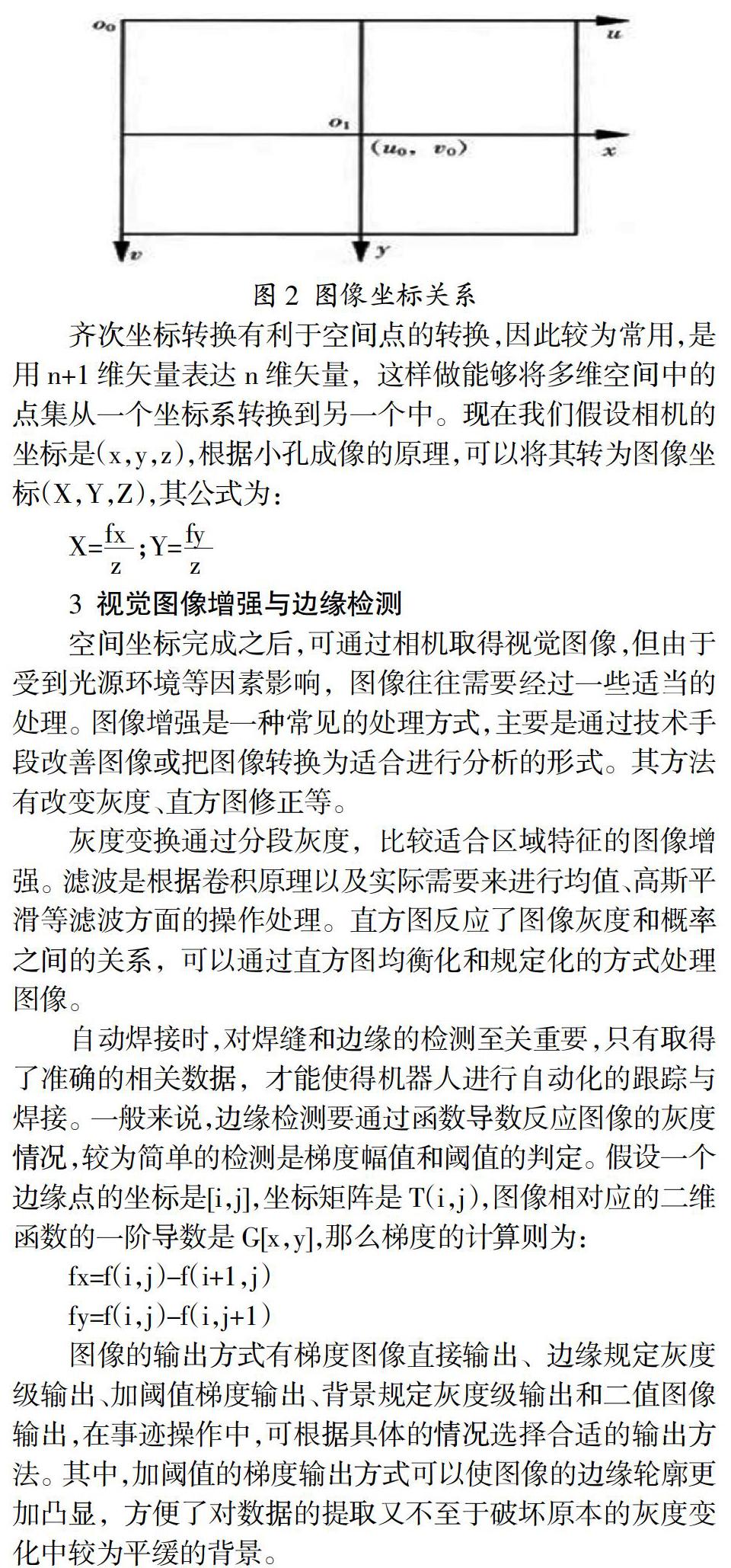
视觉空间转换有三种坐标关系。一是相机坐标系,它以光轴的中心O为原点;二是图像坐标系,它以O1为原点构成图像的平面图形;三是世界坐标系,这是重新构成的三维坐标系。坐标系的关系如图1所示:
3 视觉图像增强与边缘检测
空间坐标完成之后,可通过相机取得视觉图像,但由于受到光源环境等因素影响,图像往往需要经过一些适当的处理。图像增强是一种常见的处理方式,主要是通过技术手段改善图像或把图像转换为适合进行分析的形式。其方法有改变灰度、直方图修正等。
灰度变换通过分段灰度,比较适合区域特征的图像增强。滤波是根据卷积原理以及实际需要来进行均值、高斯平滑等滤波方面的操作处理。直方图反应了图像灰度和概率之间的关系,可以通过直方图均衡化和规定化的方式处理图像。
自动焊接时,对焊缝和边缘的检测至关重要,只有取得了准确的相关数据,才能使得机器人进行自动化的跟踪与焊接。一般来说,边缘检测要通过函数导数反应图像的灰度情况,较为简单的检测是梯度幅值和阈值的判定。假设一个边缘点的坐标是[i,j],坐标矩阵是T(i,j),图像相对应的二维函数的一阶导数是G[x,y],那么梯度的计算则为:
图像的输出方式有梯度图像直接输出、边缘规定灰度级输出、加阈值梯度输出、背景规定灰度级输出和二值图像输出,在事迹操作中,可根据具体的情况选择合适的输出方法。其中,加阈值的梯度输出方式可以使图像的边缘轮廓更加凸显,方便了对数据的提取又不至于破坏原本的灰度变化中较为平缓的背景。
