电动车用永磁同步电机的双模糊直接转矩控制
2020-02-14丁铎卢秀和
丁铎 卢秀和

摘 要:文章以永磁同步电机直接转矩控制作为研究的出发点,结合模糊控制,提出了一种模糊PI+模糊直接转矩的双模糊DTC控制方法。在模拟工况下对控制系统的性能进行了仿真实验性能对比,提高了驱动电机的转速响应和电动汽车的加速性能。
关键词:电动汽车;永磁同步电动机;直接转矩控制;模糊PI控制;双模糊直接转矩控制
中图分类号:TM341 文献标志码:A 文章编号:2095-2945(2020)01-0112-02
Abstract: Based on the direct torque control of permanent magnet synchronous motor(PMSM) and fuzzy control, a fuzzy PI+ fuzzy direct torque control method based on double fuzzy DTC is proposed in this paper. The performance of the control system is compared under the simulation condition, and the speed response of the drive motor and the acceleration performance of the electric vehicle are improved.
Keywords: electric vehicle; permanent magnet synchronous motor(PMSM); direct torque control(DTC); fuzzy PI control; double fuzzy direct torque control
1 概述
為改善环境污染以及解决石化能源枯竭问题,对绿色能源的开发和利用成为人类当下的首要任务,绿色新能源汽车,相比较燃油汽车有诸多优势。PMSM因其自身体积小、效率高、惯性低等优点慢慢走入人们视野作为电动汽车的驱动电机使用。文献[1]针对电动汽车低速状态电动机性能较差这一现状,提出了一种成本较低的电动汽车驱动电机在低速状态下的DTC系统,虽然驱动电机动态响应速率增加,但转矩波动较大;文献[2]设计了一种模糊自抗扰DTC系统,解决了传动DTC转矩脉动过大的问题,但转速响应慢,无法应用于电动汽车;文献[3-4]采用调制空间矢量的方式以改进永磁电动机DTC系统性能。
尽管模糊DTC系统有效的减小了驱动电机的转矩脉动,但当应用于电动汽车时,驱动电机的转速响应慢;控制精度低,缺点较为明显。本文针对电动汽车用电机加速过程中出现的转速响应时间长,超调量高,转矩脉动大,汽车抖动严重等问题,通过电动汽车实验台架模拟加速工况,设计了一种模糊PI控制+模糊DTC相结合的控制系统,通过Matlab/Simulink仿真实验,与传统DTC进行了对比,实验结果表明:该系统能有效的降低转速超调量以及转矩脉动较大的问题,提高转速的控制精度与电动汽车的加速性能,较常规DTC有更好的控制效果。
2 双模糊DTC系统
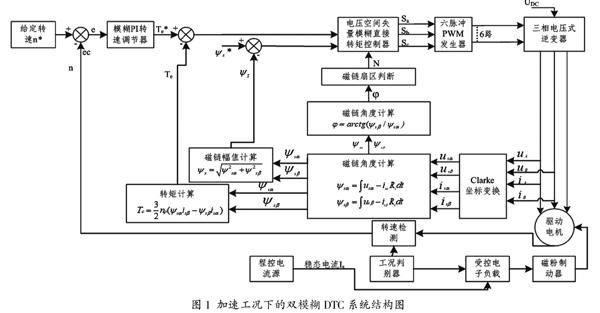
为了能够提高加速工况下的性能,建立了加速工况下的双模糊DTC系统,该系统由实验台架可控电子负载、PMSM模块、转速测量仪、工况识别系统、六脉冲PWM发生器、Clarke逆变换、三相电压式逆变器、模糊PI控制器、模糊DTC器等部分构成,具体结构如图1所示。
模拟加速工况下的该系统的控制过程为:将速度设置n*与电动机的实际速度n进行比较,以产生速度差。输入e和ec到模糊PI控制器,得到给定的转矩Te*,并通过转矩估算Te进行比较,从而得到转矩偏差ΔTe;将给定的定子参考磁链Ψs*与磁链估算得到的Ψs进行比较,得到磁链偏差?驻Ψs;经过扇区判断得到定子磁链所在扇区Sa、Sb、Sc。最后,?驻Te、?驻Ψs与磁链所在扇区Sa、Sb、Sc输入到模糊DTC控制器,经过SVPWM输出6路PWM信号来控制电机,以提高电机动态特性,提高系统的稳定性。
3 控制系统仿真对比
为了验证文中提出的控制方法,本文在Matlab/Simulink中搭建了常规DTC系统、双模糊DTC系统进行仿真对比,对PMSM进行参数设置,仿真时间设为0.2s,系统启动负载转矩为20N·m;启动给定转速500r/min。当系统启动到0.1s时,将给定转速突变到1000r/min,实验结果如图2-图5所示。
由图2、图3的仿真结果可知:双模糊DTC系统和常规DTC系统相比,前者使电机达到给定转速的时间明显少于后者,前者的转速超调量为=0.13%,后者的转速超调量为?滓=3.3%;保持驱动电机负载转矩不变,将给定速度从500r/min跳变到1000r/min,双模糊DTC系统在0.004s内完成加速且无抖动,而常规DTC系统PID则在0.02s完成加速,可知该系统的加速性能更好。由图4、图5的仿真结果可知:双模糊DTC系统相比于常规DTC转矩脉动低、控制效果更突出;保持负载转矩不变,将给定速度从500r/min变为1000r/min时,双模糊DTC系统能够在0.01s内降低转矩并恢复稳定,较常规DTC系统需要的时间更短。
4 结论
本文通过模拟加速工况和具有直接转矩的双模糊DTC系统,增强了加速性能和鲁棒性,解决了转速超调量大、转矩脉动大等问题。不难看出,双模糊
DTC系统有效的减小了驱动电机的转矩脉动与转速超调,有效提高了驱动电机的转速响应速度与电动汽车的性能。
参考文献:
[1]李浩,黄文新,邱鑫,等.一种低成本高性能的低速电动汽车控制系统[J].微特电机,2018(1):52-55.
[2]远绍羊,张政,熊志强,等.基于模糊自抗扰的永磁同步电机转矩控制[J].微特电机,2017(12):57-60.
[3]孙丹,贺益康.基于恒定开关频率空间矢量调制的永磁同步电机直接转矩控制[J].中国电机工程学报,2005,25(12):112-116.
[4]廖晓钟,邵立伟.直接转矩控制的十二区段控制方法[J].中国电机工程学报,2006,26(6):167-173.
