副翼差分驱动机构运动分析
2020-02-14宋春雨徐方舟石小亮
宋春雨 徐方舟 石小亮


摘 要:以RSSR空间机构为基础构型构建了无人机副翼差分驱动机构,通过Adams建立虚拟样机模型,对其进行运动特性分析,结果显示运动精度满足无人机控制需求。
关键词:无人机;副翼;RSSR;差分机构;运动分析
中图分类号:V224 文献标志码:A 文章编号:2095-2945(2020)01-0082-02
Abstract: Based on RSSR spatial mechanism, design of differential mechanism for unmanned aerial vehicle(UAV) aileron, built the virtual prototype model with Adams, and the motion characteristics were analyzed, the results show that the motion precision meets the requirements of UAV control.
Keywords: unmanned aerial vehicle; aileron; RSSR; differential mechanism; kinematic analysis
引言
随着无人机技术的发展,在军用和民用领域,无人机得到越来越广泛的应用。在军事领域,无人机技术可以进行目标指示、侦查、反恐、情报搜集等用途;而在民用领域,无人机技术则可用于数据采集、环境监测、影视拍摄、灾后救援、物流运输、遥感测绘、农业喷药等。
固定翼无人机作为目前研究较多无人机类型,其飞行姿态的控制往往是通过控制活动舵面的运动来实现,副翼是无人机的主操作舵面,利用左、右副翼差動偏转所产生的滚转力矩可控制无人机横滚机动。无人机副翼偏转通过舵机驱动,中间通过驱动机构将舵机输出力传递到舵面,而驱动机构的传递特性将直接影响的无人机操纵性能。杨锋平和孙秦对副翼平面六杆驱动机构进行了研究,针对其在机翼中的特殊构造,提出解析求解该机构的一种新算法,并建立满足其在飞机副翼操纵系统中约束的优化模型[1]。谢习华、陈志伟和欧阳星等利用RSSR空间连杆机构作为副翼操纵系统的末端传动机构,采用方向余弦矩阵法建立RSSR机构运动的数学模型,推导出该机构的位移方程,并在Adams软件中对该机构进行参数化建模[2]。文献[1]和[2]的左、右副翼运动依靠两套独立的机构分别控制,虽然独立的两套机构传动系统较为简单,但其控制系统相对复杂,存在舵面运动不同步,成本较高的缺陷;RSSR空间机构作为经典构型,利用两套RSSR空间机构可构建副翼差分驱动机构,将有效简化控制系统,提高控制精度。
1 副翼差分驱动机构构型
根据某无人机设计要求,需利用一套舵机实现左、右两侧副翼差分驱动,且在舵机-20°~+20°驱动转角范围内实现传动比近似为1的线性传递,左、右副翼最大转角偏差小于0.1°。RSSR空间四连杆机构作为机械领域中最常用、最基本的一种空间机构,具有传动精度高、结构紧凑的优点,将RSSR连杆机构与不同类型机构组合可实现复杂的运动轨迹和规律。
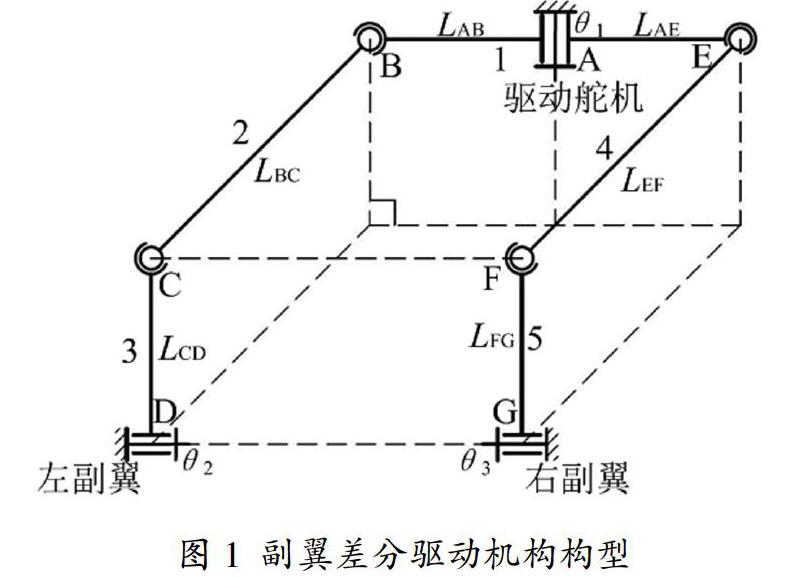
以RSSR空间机构作为基本运动构型,通过串连与并连的方式搭建双正交RSSR差分机构,构型如图1所示。运动链ABCD控制左副翼运动,运动链AEFG控制右副翼运动,两运动链采用相同的杆长条件和布置方式且关于驱动舵机对称。以左侧运动链为例,对差分机构构型进行说明,其中连杆1、3分别同机架构成转动副(R副),连杆2分别与连杆1、3构成球副(S副);驱动舵机轴与舵面转轴为垂直布置,且初始位置时,连杆2与连杆1、3均呈垂直状态。各连杆长度为LCD=LFG=LAE=LAB=100mm,LBC=LEF=300mm。
2 仿真分析
为分析双RSSR副翼差分驱动机构运动特性,根据图1差分机构构型示意图,在多体动力学软件ADAMS/View中建立虚拟样机[3],构件1与机架通过转动副相连,并将其设置为驱动关节,构件2分别与构件1、构件3通过球副相连,构件4分别与构件1、构件5通过球副相连,构件3与构件5分别与机加通过转动副相连,仿真分析模型如图2所示。
设置驱动舵机以20sin(2πt)的正弦规律运动,对驱动机构输入角度及输出角度进行监测,驱动舵机运动角度曲线如图3所示,左、右副翼角度偏转曲线如图4所示,从图中可以看出,在整个运动过程中左、右副翼偏转角度偏差如图5所示。
从图3~图5可以看出,当舵机运动转角在-20°~+20°范围内时,左副翼与右副翼的偏转角度方向相反,且两舵面偏转角度与舵机转角大小近似相等,达到了传动比近似为1的差分运动目的。当舵机转角为-20°时,右副翼偏转角为+20.074°,最大角度偏差为0.074°,左副翼偏转角为-19.926°,最大角度偏差为0.063°;当舵机转角为+20°时,右副翼偏转角为-19.927°,最大角度偏差为0.063°,左副翼偏转角为20.074°,最大角度偏差为0.074°,满足累计偏差小于0.1°的精度要求。
3 结论
以RSSR空间机构为基本构型设计了双正交RSSR副翼差分驱动机构,在多体动力学软件ADAMS/View中建立虚拟样机,对差分驱动机构进行了运动分析,分析结果显示左、右副翼偏转角度大小相等,方向相反,最大转角偏差为0.074°,满足某无人机左、右副翼差动,在舵机-20°~+20°驱动转角范围内实现传动比近似为1的线性传递,且左、右副翼最大转角偏差小于0.1°的要求。
参考文献:
[1]杨锋平,孙秦.副翼六杆机构优化设计研究[J].机械科学与技术,2007,26(9):1151-1154.
[2]谢习华,陈志伟,欧阳星,等.轻型飞机副翼操纵系统中改进的RSSR机构研究[J].航空工程进展,2017,8(2):213-218.
[3]李增刚.ADAMS入门详解与实例[M].国防工业出版社,2014:67-93.
