无人艇重定义无模型自适应艏向控制方法与试验
2020-02-07廖煜雷杜廷朋付悦文姜权权陈启贤姜文
廖煜雷, 杜廷朋, 付悦文, 姜权权, 陈启贤, 姜文
(哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
无人艇(USV)是一种自主式无人水面艇[1]。在不同航速下艇体的浸湿面积、吃水等物理参数变化较大,导致艇体水动力系数随着航速的变化而改变,即无人艇具有非线性、不确定性和时变性特征;同时无人艇受到环境干扰力的影响较大,难以建立精确的无人艇动力学模型[2-3]。因此,探索不确定性影响下无人艇的艏向控制问题具有重要意义。
艏向控制是无人艇最基本的运动控制问题之一,也是控制理论应用较早、取得成果较多的一个研究领域。目前,无人艇艏向控制方法主要有PID控制[4-5]、切换控制[6]、最优控制[7-8]、自适应控制[9]、鲁棒控制[10]、滑模控制[11-12]及智能控制[13-15]等,其中PID控制的实船应用最为广泛[4-5,16-18],一些基于反步法、滑模控制原理的控制器也进行了试验研究的尝试[9,11],然而大部分基于数学模型的控制方法(“模型导向”设计策略)仍停留在理论研究及仿真试验阶段。
无人艇是一类复杂的控制系统,其运动控制难题体现在[2,19]:1)难以构建精确的数学模型,导致基于数学模型的许多控制方法难以在工程应用中保证控制性能;2)受到模型摄动、环境扰动等不确定性影响,常规“模型导向”设计策略开发的控制算法自适应性较差,很难保障不确定性影响下系统的鲁棒性与稳定性。因此,常规“模型导向”控制方法难以在工程应用中达到理想的控制效果、且物理实现困难,这严重地阻碍其应用[19]。
本文拟从数据驱动控制角度(“数据导向”设计策略,如PID、无模型自适应控制、迭代学习控制等),不考虑无人艇数学模型,而是基于系统的输入输出(input/output, I/O)数据进行控制器设计。事实上,PID控制器就是一种经典、常用的数据驱动控制方法。然而在仿真、外场试验中发现,无人艇容易受到模型摄动、环境干扰的影响,这导致PID控制器难以维持一致的控制性能,参数需要再次调节才能使系统稳定[5,18-19]。因此,无人艇需要一种鲁棒性好、自适应性强的无模型控制器。无模型自适应控制(model free adaptive control, MFAC)[19-20]方法很好地符合上述要求,是一种针对非线性系统设计的控制方法,在交通、炼油、化工等工业控制领域获得了应用[19-20],但是目前在飞行器、机器人、舰船等运动控制领域的研究还较少。
本文基于紧格式动态线性化MFAC(compact form dynamic linearization based MFAC, CFDL-MFAC)方法,探讨不确定性影响下无人艇的艏向控制问题。首先,分析CFDL-MFAC方法在无人艇艏向控制应用中面临的难题;然后,考虑无人艇艏向控制子系统的动力学特性,引入重定义输出增益,提出了重定义输出型CFDL-MFAC(redefinition output CFDL-MFAC, RO-CFDL-MFAC)方法;最后,利用仿真研究和“海豚-Ⅱ”号小型无人艇开展的外场试验,检验上述方法的有效性。
1 MFAC方法及无人艇应用分析
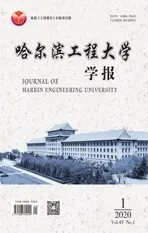
MFAC方法的基本原理是在每个工作点处,建立与非线性系统等价的动态线性数据模型,利用受控系统的I/O数据在线估计系统的伪偏导数(pseudo partial derivative, PPD),然后设计加权一步向前的控制器,进而实现非线性系统基于数据驱动的无模型自适应控制[20]。本文考虑无人艇系统特性以及工程实用性需求,以CFDL-MFAC方法为基础,探索无人艇的艏向控制问题。
1.1 紧格式动态线性化方法
一般单输入单输出非线性离散时间系统,可表示为[20]:
y(k+1)=f(y(k),…,y(k-ny),u(k),…,u(k-nu))
(1)
式中:u(k)∈R,y(k)∈R分别表示系统在k时刻的输入和输出,ny、nu是未知的正整数,无人艇的艏向子系统可以用式(1)来表示。
在介绍紧格式动态线性化方法之前,对系统(1)提出如下假设[20]:
假设1除有限时刻点外,f(·)关于第(ny+2)个变量的偏导数存在且连续。
假设2除有限时刻点外,系统(1)满足广义Lipschitz条件,即对任意k1≠k2,k2,且k2≥0和u(k1)≠u(k2)有:
|y(k1+1)-y(k2+1)|≤b|u(k1)-u(k2)|
(2)
式中:y(ki+1)=f(y(ki),…,y(ki-ny),u(ki),…,u(ki-nu)),i=1,2;b>0是一个常数。
假设1是控制系统设计中对一般非线性系统的一种典型约束条件;假设2是对系统输出变化率上界的一种限制,即有界的输入能量变化产生有界的输出能量变化,显然它包括一大类非线性系统,海洋航行器(如船舶、潜艇等)的艏向控制子系统满足上述假设条件。
定理1[20]对满足假设1、2的非线性系统(1),当|Δu(k)|≠0时,一定存在一个被称为是“伪偏导数”的时变参数φ(k)∈R,使得系统(1)可转化为CFDL数据模型:
Δy(k+1)=φ(k)Δu(k)
(3)
并且,φ(k)在任意时刻k有界,式中Δy(k+1)=y(k+1)-y(k),Δu(k)=u(k)-u(k-1)。
定理1的证明参见文献[20]。根据式(3),系统(1)的CFDL数据模型(泛模型)可以写为:
y(k+1)=y(k)+φ(k)Δu(k)
(4)
式(4)为一类离散时间非线性系统(1)的动态线性化表示形式,这是一个针对控制器设计、具有增量形式、只含一个单参数的线性时变数据模型,这与受控对象传统的机理模型和其他线性化方法得到的模型有着本质区别。
1.2 紧格式动态线性化MFAC方案
基于紧格式动态线性化无模型自适应控制的方案[20]为:
(y*(k+1)-y(k))
(5)

(6)



(7)

上述CFDL-MFAC方案中,算法重置机制(7)的引入,是为了使其PPD估计算法(6)对时变参数的跟踪能力更强[20]。
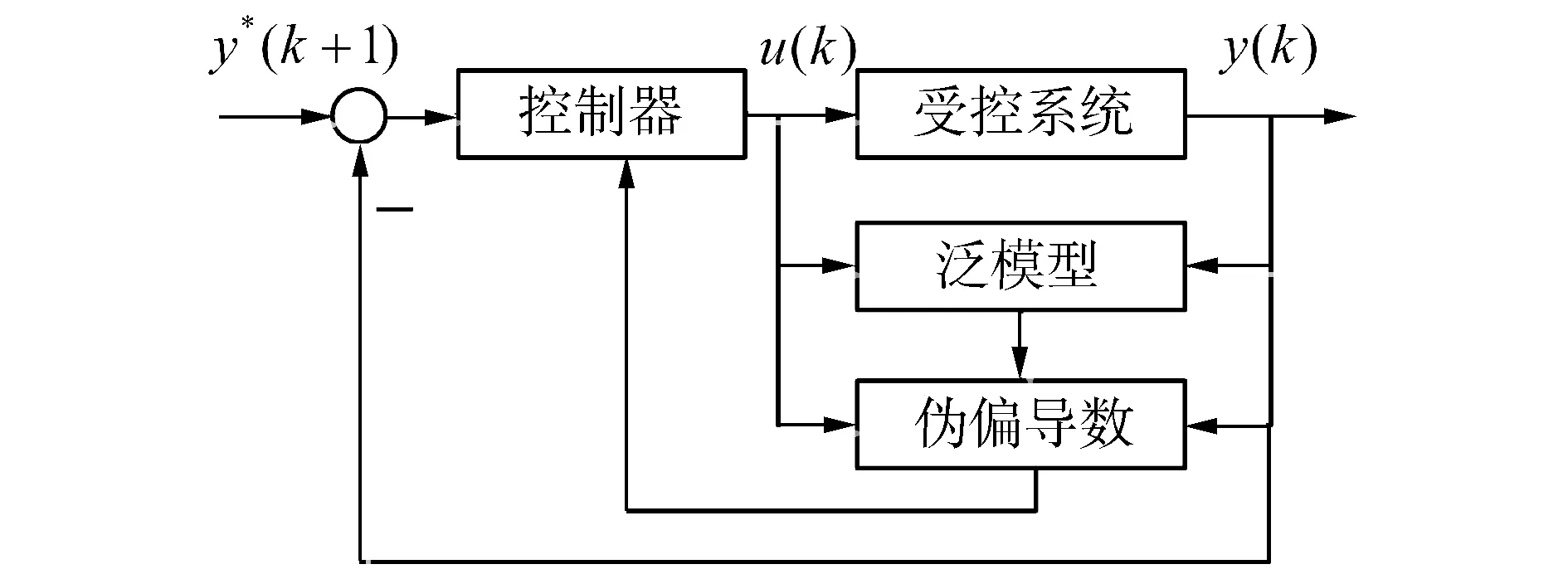
图1 MFAC控制系统原理Fig.1 Schematic diagram of MFAC control system
该方案基于受控系统I/O数据进行设计(“数据导向”),与受控系统的模型阶数和参数无关,对时变参数、时变结构等不敏感,因此有较强的鲁棒性和适应性。但是,MFAC方法也并不是万能的,它只针对一大类非线性系统有效,为了严谨的进行稳定性证明,这类系统除了要满足假设1、2之外还要满足以下假设[20]:
假设3系统(1)输入输出可观测、可控制,即对某一有界的期望输出信号y*(k+1),存在某一有界的可行控制输入信号u*(k),使得系统在输入u*(k)的驱动下,系统期望输出等于y*(k+1)。
假设4对任意时刻k及Δu(k)≠0,系统伪偏导数的符号保持不变,即满足φ(k)>ε>0,或φ(k)<-ε,ε为一个小正数。
假设3是是控制问题可设计求解的一个必要条件,也就是系统具有输出可控性;假设4的物理意义是控制输入增加时,相应的受控系统输出应该是不减的。这是系统的一种“拟线性”特性,此条件与基于模型的控制方法中要求控制方向已知(或符合不变)假设相类似,比如温度控制系统、压力控制系统等。
1.3 基于CFDL-MFAC的无人艇运动控制分析
无人艇艏向非线性控制子系统的设计是无人艇控制系统的核心部分,典型的艏向控制原理如图2所示,其中ψd为期望航向,ψ为实际航向,δd为期望舵角,δ为实际航向。
无人艇的艏向输出范围是-180°~180°,当控制输入(舵角或偏航力矩)增大时,受控系统输出(艏向角)并不是一直增大,不能满足CFDL-MFAC方法对受控系统的“拟线性”假设4,假设4是受控系统必须要满足的条件,这导致CFDL-MFAC方法不能直接应用于无人艇的艏向控制子系统。
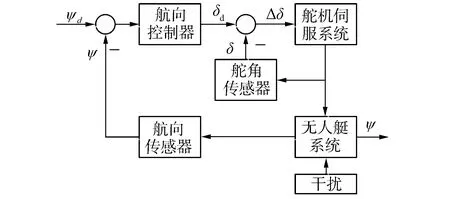
图2 典型的无人艇艏向控制原理Fig.2 Typical control schematic diagram of USV
针对无人艇艏向控制子系统存在的上述独特问题,考虑无人艇的特殊动力学行为,下面对CFDL-MFAC方法进行分析和改进。
2 重定义输出CFDL-MFAC方法
针对艏向子系统不满足“拟线性”假设4的问题,提出一种基于重定义输出的改进CFDL-MFAC方法:重定义输出CFDL-MFAC方法(RO-CFDL-MFAC),并分析其稳定性。
2.1 基于重定义输出的CFDL-MFAC方法
通过分析无人艇的动力学特性,结合CFDL-MFAC对受控系统的要求,将受控系统的输出定义为y(k+1)=ψ(k+1)+K1r(k+1),即将艏向子系统的艏向ψ、转艏角速度r的线性和作为系统的重定义输出信号,其中K1>Kmin为重定义输出增益(即转艏角速度增益),Kmin为某个最小正常数。
则无人艇艏向子系统镇定控制问题可写为y*(k+1)=ψd(k+1)+K1rd(k+1)=ψd+K1rd=Const,其中期望转艏角速度rd恒为零,如果选择合适的参数K1,当控制输入增大时,K1r会持续增大,抵消艏向ψ减小的问题,确保受控输出ψ+K1r也随之增大,从而满足了假设4的要求,使CFDL-MFAC方法可以应用于无人艇艏向控制子系统。基于RO-CFDL-MFAC方法的艏向控制子系统原理框图如图3所示。
图3 基于RO-CFDL-MFAC方法的艏向控制原理Fig.3 Schematic diagram of heading control based on RO-CFDL-MFAC method
从图3可知,艏向控制子系统多了1个可调参数K1,将角速度信号加入外环反馈系统中,丰富并改变了受控输出的内涵,满足CFDL-MFAC方法对受控系统的基本要求,从而实现对无人艇艏向的控制。同时,类似于PD型控制器,引入角速度增益有利于减弱超调以改善控制性能,整个改进系统结构简单、易于工程实现。下面分析RO-CFDL-MFAC方法的稳定性。
2.2 重定义输出条件下伪偏导数特性分析
考虑一种被广泛采用的无人艇水平面运动数学模型[21-23]:
(8)
式中:x、y、ψ分别表示无人艇在大地坐标系下的纵向、横向位移和艏向角,u、υ、r分别表示随船坐标系下的纵向、横向速度和转艏角速度,mii、dii分别是船的惯性和阻尼参数矩阵在随船坐标系3个坐标轴上的分量,控制输入为纵向力Fu和偏航力矩Tr。
式(8)中第3项和第6项构成的艏向控制子系统,可以写为离散时间形式:
(9)
式中:Ts为采样时间;ψ(k)、u(k)、υ(k)、r(k)、Tr(k)分别表示系统在k时刻的输出(艏向角、纵向线速度、横向线速度、转艏角速度)和输入(偏航力矩)。
设计艏向控制子系统的重定义输出为:
y(k+1)=ψ(k+1)+K1r(k+1)
(10)
式中K1>0为角速度反馈增益。
2.1节的定性分析表明,选择合适的参数K1可以使得艏向控制子系统满足假设4,然而不合适的参数K1将导致RO-CFDL-MFAC方法失效。下面针对式(10)定义的重定义输出及其参数K1进行分析。
依据式(10),可得差分形式的重定义输出为:

(11)
由定理1可知,考虑离散时间艏向控制子系统(9),任意时刻k满足Δδ(k)≠0时,有CFDL数据模型(3)成立。对比式(11)和(3)可知,艏向控制子系统的伪偏导数可等价表示为:
(12)
即对于离散时间艏向控制子系统(9),可以将φ(k)显式地表示为式(12)。
下面重点分析参数K1在何种取值范围下,才能够使得φ(k)满足假设4。首先,讨论ΔTr(k)>0的情况,即对于任意时刻k当满足ΔTr(k)>0时,使得伪偏导数φ(k)>0恒成立。由式(12)可知,φ(k)>0等价于下列不等式成立。
Δψ(k+1)+K1Δr(k+1)>0
(13)
考虑一种极端情况,随着艏向角ψ(k)的逐渐增大,当增大到180°时,下一时刻变为-180°。因此,此时Δψ(k+1)=-2π,依据船舰操纵常识和式(9)可知ΔTr(k)>0时,Δr(k+1)>0恒成立,因此式(13)变为:
-2π+K1Δr(k+1)>0
(14)
若选择合适的参数K1满足式(15),则不等式(14)成立。
(15)

(16)

上述分析是针对一种离散形式艏向控制子系统(9)进行的,理论分析表明通过引入重定义输出y(k+1)=ψ(k+1)+K1r(k+1),可使得艏向控制子系统满足CFDL-MFAC方法的假设4,且参数K1存在一个最小的取值范围。
3 仿真与试验研究分析
3.1 仿真研究与分析
3.1.1 重定义输出增益对比试验
利用重定义输出增益对比试验进一步分析其对艏向控制性能的影响,仿真中选取一种常用的无人艇数学模型[23],具体模型参数为:
m11=200 kg,m22=250 kg,m33=80 kg·m2,
d11=70 kg/s,d22=100 kg/s,d33=50 kg·m2/s。

图4 不同重定义输出增益下艏向角阶跃响应曲线Fig.4 Heading angle step response curves under different redefined output gain
从图4可知,在RO-CFDL-MFAC方法其他参数相同的条件下,随着重定义输出增益K1的不断变大,艏向控制子系统从失稳变为稳定,响应时间从快逐渐变慢,仿真结果表明通过引入重定义输出增益有效地解决了CFDL-MFAC方法不适用于无人艇艏向控制的问题。
在调节参数K1时发现,K1越小响应越快,同时超调也越大;反之K1越大响应速度变缓,超调越小。只有选择合适的K1和CFDL-MFAC控制参数,才能获得理想的控制性能。
3.1.2 标称模型下对比试验
为验证文中所提控制方法的有效性,分别与文献[24]和文献[25]中的数字式PID以及模糊PID控制方法进行了仿真对比试验。
在图5~8中,将“RO-CFDL-MFAC算法”在图例中简写为“MFAC”。
3种艏向控制方法的仿真结果如图5所示。PID、模糊PID和RO-CFDL-MFAC控制器艏向阶跃曲线较为相似,其中在PID、RO-CFDL-MFAC控制器作用下无人艇的艏向基本无超调,艏向稳定耗时约为40 s。模糊PID控制器响应速度最快,艏向稳定耗时约20 s,但艏向响应曲线出现超调。对比试验表明:在标称模型和无扰动影响条件下,PID和MFAC 2种控制器具有较为一致的控制性能,模糊PID控制器艏向响应虽然出现4%左右的超调,但可以显著提高艏向响应速度,并降低稳态调节耗时。
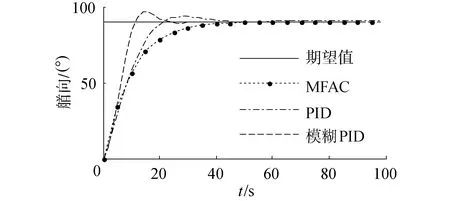
图5 标称模型下艏向角的阶跃响应曲线Fig.5 The step response curves of heading angle under the nominal model
3.1.3 不确定性影响下的对比试验
为进一步检验模型参数改变、环境扰动影响下的控制器性能,仿真试验中选用另一种小型无人艇数学模型[26],该艇长1.2 m、质量为17.5 kg,其模型参数为:
m11=25.8 kg,m22=33.8 kg,m33=2.76 kg·m2
d11=12 kg/s,d22=17 kg/s,d33=0.5 kg·m2/s


图6 不确定影响下艏向的阶跃响应曲线Fig.6 The step response curves of the heading under the uncertain influence
从图6可知,不确定影响使PID和模糊PID控制器的性能显著下降,在初期PID和模糊PID的控制器响应震荡剧烈,难以满足艏向的控制需求,而艏向性能恶化对于无人艇的安全航行极为不利;相比之下,RO-CFDL-MFAC控制器的艏向误差和较小、可以稳定的收敛,体现出较强的鲁棒性和自适应性,在不确定性影响下仍然保持一致的控制性能。
3.2 外场试验与分析
将PID、RO-CFDL-MFAC方法应用于“海豚-Ⅱ”号小型无人艇(如图7),开展了外场试验研究。“海豚-Ⅱ”号为小型单体船,长0.9 m、宽0.3 m、排水量12 kg。

图7 “海豚-Ⅱ”号小型无人艇Fig.7 “Dolphin-II” USV
在试验中,无人艇的航速约为1.2 m/s,PID控制器参数Kp=0.92,KI=0.01,Kd=1(外场试验中重新调节),RO-CFDL-MFAC控制器参数为λψ=0.5,μψ=1,ηψ=0.1,ρψ=1,K1=10(与仿真中一致),调节PID控制参数,使其与RO-CFDL-MFAC具有相似的控制性能,以体现对比试验的公平性,试验结果如图8、9所示。从图8、9可知,2种控制器均使无人艇艏向收敛到期望值,响应过程超调小、震荡小,具有较好的动态性能。
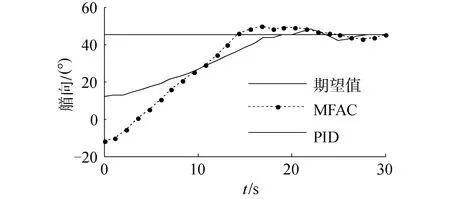
图8 45°定向艏向响应曲线Fig.8 Response curve of heading oriented at 45°
通过仿真及外场对比试验可知,由于外场试验中“海豚-Ⅱ”号与仿真中无人艇模型区别较大,PID控制器需要重新进行参数调节,而RO-CFDL-MFAC控制器则不用。这意味着RO-CFDL-MFAC控制器对无人艇的模型改变具有良好的自适应性,保持了一致的控制性能,这有助于提升控制系统的鲁棒性能;同时,RO-CFDL-MFAC控制器减少了参数的调节过程,有效节约了宝贵的试验时间,这对于推进工程应用具有重要意义。
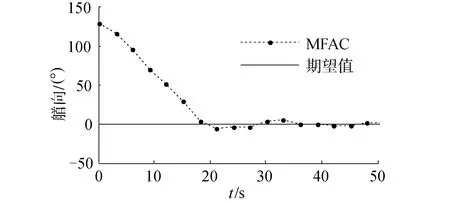
图9 0°定向艏向响应曲线Fig.9 Response curve of heading oriented at 0°
4 结论
1)通过对CFDL-MFAC方法及无人艇运动控制应用的分析表明,无人艇艏向控制子系统的特殊动力学特性导致其不满足“拟线性”假设4,使得CFDL-MFAC方法不能直接应用于无人艇的艏向控制;
2)引入重定义输出增益提出了RO-CFDL- MFAC方法,分析表明存在适宜的重定义输出增益可以保证RO-CFDL-MFAC方法满足“拟线性”假设4,解决了CFDL-MFAC方法存在的艏向控制应用局限;
3)通过仿真及外场试验表明,对比PID和模糊PID,RO-CFDL-MFAC方法对模型摄动、环境扰动等不确定性影响不敏感,具有较好的自适应性。