潜望式激光通信终端的扰动抑制与动态跟踪方法
2020-02-06张敏李勃滕云杰姜会林
张敏, 李勃, 滕云杰, 姜会林
(1.长春理工大学 空间光电技术国家地方联合工程研究中心, 吉林 长春 130022;2.中国科学院 深海科学与工程研究所, 海南 三亚 572000)
0 引言
空间激光通信技术是以激光为信息载体所建立的通信速率高、抗干扰性强、信息容量大的数据通信链路,相对于微波通信,具有体积小、保密性好等特点,是未来通信系统的发展方向之一[1-3]。激光通信终端系统中的指向、捕获、跟踪(PAT)子系统设计是实现远距离空间激光通信的关键技术,其主要功能是实现空间目标的扫描捕获、跟踪以及对准,它关系到能否成功建立激光链路,其跟踪稳定性与跟踪精度也决定着通信质量的好坏[4-6]。
潜望式激光通信系统是集光机电为一体的通信终端系统。随着卫星间激光通信的商业化与实用化发展,以及利用卫星激光通信网络进行空间组网、构建天地一体化信息网络,以实现全球化覆盖等需求的前提下,使激光通信终端的设计更加趋向于高集成度、小型化、轻量化等的发展方向[7-11]。而潜望式结构具有质量轻、转动惯量小的特点,常用于小口径的轻小型卫星通信终端。
激光通信系统中平台振动、安装结构误差以及转台力矩脉动等都是影响跟踪瞄准控制系统性能的主要因素[12-14]。不精确的跟踪系统会使得通信过程中信号丢失甚至导致建链失败,降低系统性能。需要通过控制策略设计以及优化跟踪算法等方式来辅助提高通信终端的控制性能,从而提高终端伺服系统的动态跟踪精度,保证信号传输[15]。
激光通信终端伺服系统普遍采用粗跟踪与精跟踪复合的控制结构,方位轴和俯仰轴的执行机构包括转台和振镜。其中,粗跟踪过程主要采用二维伺服转台实现大范围瞄准,终端利用振镜的实时角度位置作为粗瞄准转台的位置反馈值,完成复合跟踪过程的位置随动,粗跟踪模块具有跟踪范围大、带宽窄、控制精度低等特点[16-17]。精跟踪模块由二维振镜、高分辨率相机、精跟踪控制器等组成,精跟踪过程依据成像相机高频反馈的入射光斑位置脱靶量,驱动振镜实现高带宽精确对准,可以补偿粗跟踪过程的残余误差,虽然跟踪范围较小,但能够提高整个伺服系统的跟瞄精度[18-21]。
激光通信系统的轴系之间均采用相互独立的控制系统设计,且方法基本相同。本文以潜望式激光通信终端伺服控制为研究对象,系统采用基于永磁同步力矩电机的模型,参考自适应力矩估计方法设计通信终端控制系统的控制器,通过优化控制策略提高通信终端的低速跟踪性能。在此基础上重点从抑制电机力矩扰动以及提高跟踪过程速度平稳性的角度对控制系统进行设计,给出了详细的设计方法和动态验证的实验结果。在正弦波扰动条件下,对复合轴跟瞄控制系统进行动态模拟实验,完成复合跟踪过程的位置随动,验证了扰动条件下潜望式通信终端伺服系统的动态跟踪能力。
1 潜望式交流控制系统
潜望式激光通信终端伺服控制系统的方位轴和俯仰轴执行机构分别采用永磁同步力矩电机进行驱动,并且每个轴的控制结构都由相应典型的电流环、速度环、位置环以及光闭环组成。其中,光闭环是依据成像相机反馈的入射光斑位置脱靶量,反馈的偏差值经过控制器后输出控制量,驱动二维伺服转台实现校正,最终将目标光斑跟踪到探测器视场中心。位置回路通过给定指令以及实时采集位置编码器反馈信号实现闭环,速度回路将位置环控制器的输出作为输入,将采集到的位置编码器信号进行差分滤波并反馈以完成速度闭环控制,电流环的主要作用是将获得的力矩指令输出给电机驱动器,伺服系统结构如图1所示。图1中,θ为外部位置环反馈量,v为速度回路反馈量,i为内部电流回路反馈。
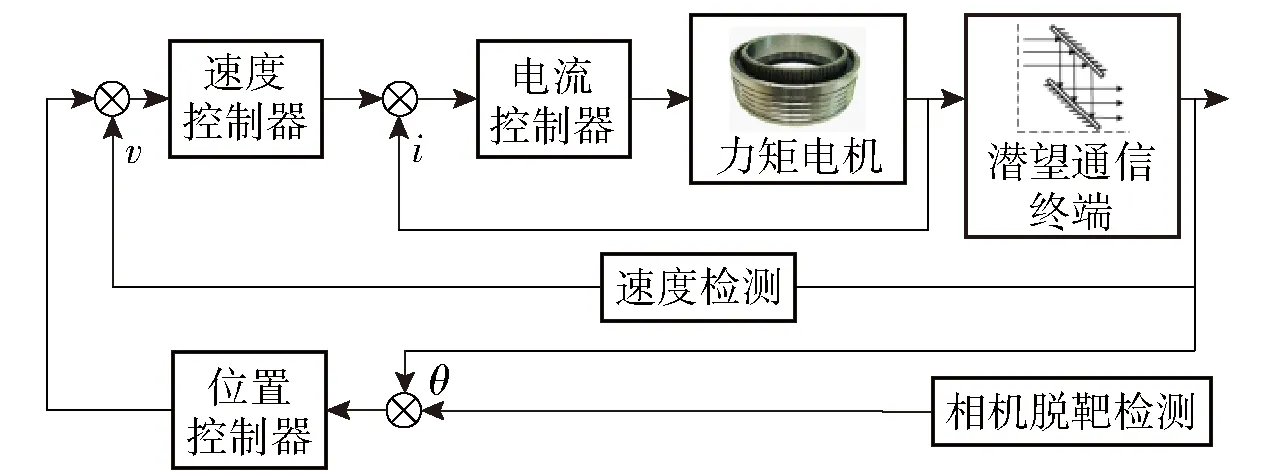
图1 通信终端控制系统结构图Fig.1 Structure diagram of communication control system
采用无刷的交流永磁同步电机作为激光通信伺服系统的重要执行机构,实现通信终端的驱动控制,该力矩电机的组成部分中定子为线圈,转子为永磁体,主要采用电子换向方式进行控制,并且无机械电刷,同时具有转动惯量小、抗干扰性强、功率密度大、可靠性高等特点。
基于永磁同步电机的潜望式通信终端系统主要应用于高精度低速跟踪模式,不需要弱磁调速,因此考虑选择表面贴装式永磁同步电机。为减小电机力矩波动对伺服系统性能的影响,在电机的驱动方式上将选择电机d轴的定子电流id=0 A的空间矢量控制方法,以实现电流解耦。首先,为了便于分析,需要建立三相电机驱动通信终端系统的数学模型,永磁同步电机在dq坐标系下的定子电压方程为
(1)
式中:ud、uq分别为电机d轴、q轴的定子电压;Rs为定子电阻;iq为电机q轴的定子电流;Ld、Lq分别为电机d轴、q轴的电感;ω为转子旋转的机械角速度;φd、φq分别为d轴、q轴永磁体的励磁磁链;t为伺服系统执行过程的时间变量。
永磁同步电机的电磁转矩方程为
(2)
式中:Te为电磁转矩;p为电机转子极对数;φf为永磁体中转子磁场链过定子的磁链。
定义如下转矩常数:
(3)
则电机的运动方程为
(4)
式中:J为转动惯量;TL为负载转矩;Bm为黏性摩擦系数。
基于永磁同步电机的潜望式调速系统,要求速度回路具有调速范围宽、抗干扰能力强、控制精度高的特点。而比例型迭代学习方法具有易实现的优点,广泛应用于电机控制系统的扰动抑制,因此本文采用带遗忘因子的比例型迭代学习控制策略。
在不考虑噪声干扰时,系统第k个控制周期的误差信号ek(t)将由给定命令和实时输出之间的差值给出:
ek(t)=yr(t)-yk(t),
(5)
式中:yr(t)为给定值;yk(t)为第k个控制周期的输出量。
将误差信号按比例累加到控制量中,实现前馈控制,则选取的控制律结构形式如下:
uk+1(t)=uk(t)+Φek(t),
(6)
式中:uk+1(t)为第k+1个控制周期的控制量输出;uk(t)为第k个控制周期的控制量输出;Ф为误差量的比例增益。
当考虑噪声信号对系统输出的影响时,系统的误差信号将是给定命令与实时输出以及扰动因素之间的差值,其表达形式如下:
ek(t)=yr(t)-[yk(t)+ξk(t)],
(7)
式中:ξk(t)为引入系统输出的噪声扰动因素。
将遗忘因子α(α>0)引入比例型学习算法,选取控制律的结构形式如下:
uk+1(t)=(1-α)uk(t)+
Φ{yd(t)-[yk(t)+ξk(t)]}.
(8)
2 通信终端系统的力矩波动抑制方法
通信终端控制系统各环路设计的刚度越高,其抗干扰能力越强,但系统的控制带宽受到终端结构谐振频率的限制,并不能做得很高,一般为十几赫兹。受伺服系统带宽的限制,如何降低力矩波动以提高运行速度平稳性,成为系统设计的关键。本文针对内部电流回路,采用模型参考自适应力矩估计的控制策略,对永磁同步电机的输出力矩进行估计,以实现抑制扰动以及削弱电机力矩波动的目的。
基于永磁同步电机的控制系统状态空间模型可以描述为如下形式:

(9)

(9)式力矩电机模型作为参考,实际通信终端系统的可调模型可表示为

(10)
(11)

A*D+DA*=-Λ,
(12)
Λ为正定矩阵,A*=A+η,并且满足A*的极点均位于开环系统的左半平面内。为了满足本文提出自适应算法的稳定性,选择如下Lyapunov函数:
V(e,φ,t)=eTDe+ξ-1φTφ,
(13)
式中:φ=Ψ-.
(13)式对时间求导,可以得到
(14)
(15)
式中:λmin(Λ)是正定矩阵的最小特征值。
因此,基于Lyapunov稳定性理论证明了所提出的自适应算法的稳定性,采用磁链的估计值,永磁同步电机的输出力矩可以通过(16)式估计:
(16)
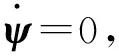
当通信终端系统内部电流环采用经典PI控制算法时,控制器参数均为kp=2.3,ki=0.7. 系统在速度给定值为0.5°/s时的电机三相电流以及速度阶跃响应曲线如图2所示。从图2(a)中可以看出,在速度阶跃过程中三相电流呈现出正弦波形,电流最大幅值接近于0.03 A;从输出电流可知系统存在着较大的力矩脉动,而受转矩波动的影响,伺服系统所能达到的跟踪精度也将受到限制,如图2(b)所示,速度回路阶跃响应输出超调量大、稳态精度低,稳态误差为±0.07°/s.
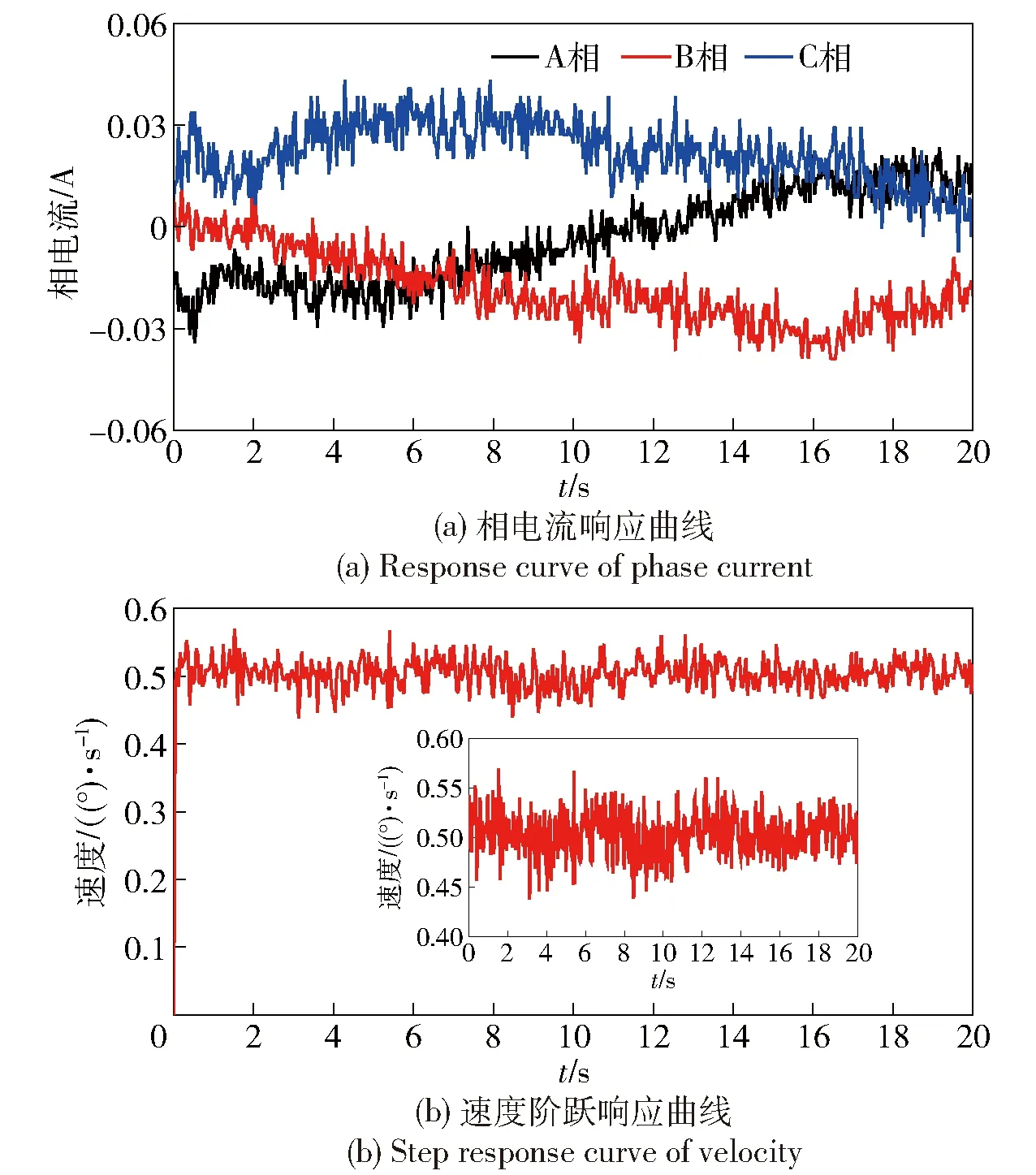
图2 经典PI控制策略的实验响应结果Fig.2 Experimental results of PI control strategy
当通信终端系统内部电流环采用模型参考自适应力矩估计方法时,系统给定速度为0.5°/s时的电机三相电流以及速度阶跃响应曲线如图3所示。从图3(a)中可以看出,在速度阶跃过程中,三相电流呈现出标准的正弦波形,电流最大幅值接近于0.03 A. 对比图2中经典控制实验结果可以看出,采用模型参考自适应力矩估计算法对比经典PI控制策略,能够有效降低系统中执行结构的力矩波动,使得控制系统的速度阶跃响应达到更高的稳态精度,为采用速度回路实现对动目标的稳定跟踪提高速度平稳性。
图3 自适应力矩估计控制方法的实验响应结果Fig.3 Experimental results of adaptive torque estimator control
如图3(b)所示,当采用模型参考自适应力矩估计方法时,稳态过程时速度阶跃响应误差可以保持在较高的控制精度,稳态误差可以达到±0.02°/s,相比较于经典控制策略的稳态误差得到了显著的提高,也验证了伺服系统具有较好的低速平稳性,为进一步实现扰动条件下的基于速度回路动态跟踪奠定了基础。
3 动态跟踪实验
为了验证模型参考自适应力矩估计以及控制算法的实际应用效果,搭建了基于潜望式通信终端伺服系统的动态跟踪实验。室内跟踪实验如图4所示,实验基于10 m平行光管来模拟平行入射光,目的在于验证扰动条件下潜望式通信终端伺服系统的动态跟踪能力。实验装置由发射端和接收端两部分组成,发射端由波长850 nm功率可调的激光器和10 m平行光管组成,为测试提供可靠的目标光信号。接收端主要由潜望周扫转台、光源、扰动平台、电控箱、电源、上位机以及相机图像显示器等部分组成。
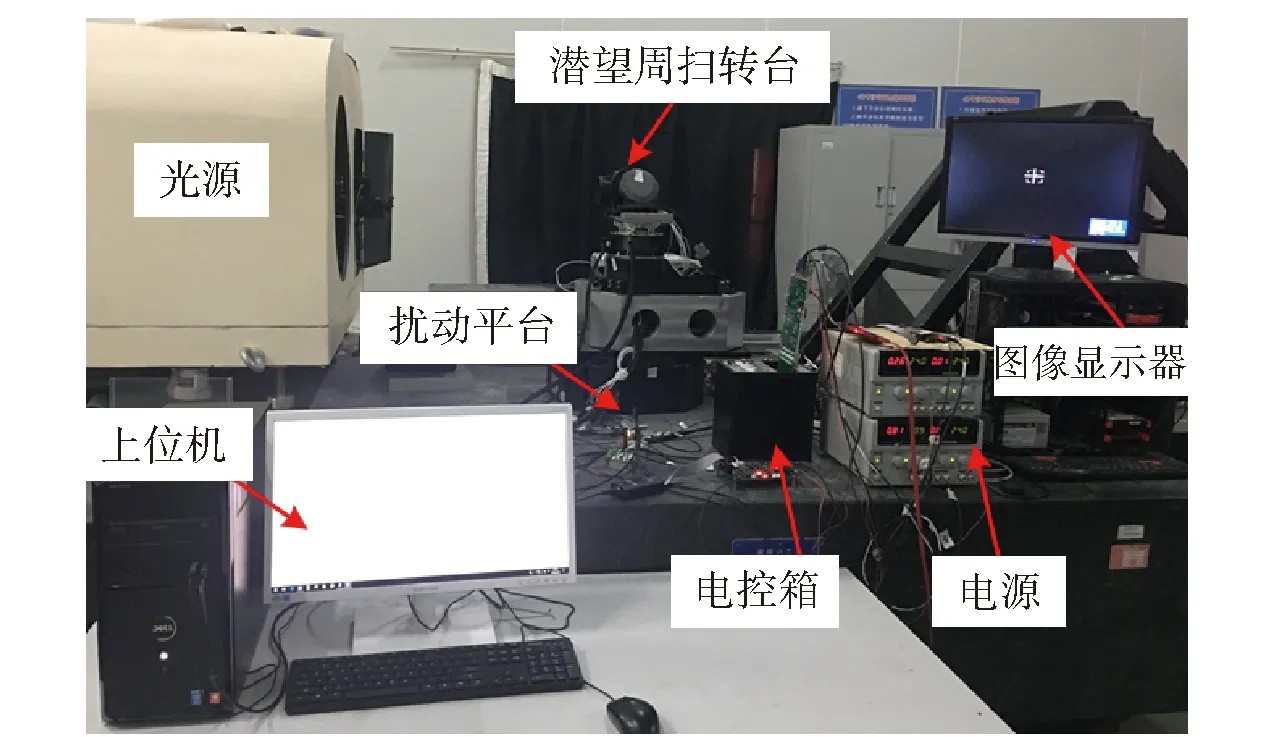
图4 动态跟踪实验平台Fig.4 Dynamic tracking experimental platform
潜望式通信终端主要通过控制安装在正交轴上的两个45°平面镜旋转来实现空间扫描,由永磁同步电机直接驱动。该二维伺服转台的组成部分包括方位轴和俯仰轴的电机、编码器、望远单元、光学系统结构。
永磁同步电机的主要参数为:方位轴:电阻Rs,a=6.6 Ω,磁极对数pa=11,电感Ld,a=Lq,a=21.3 mH;俯仰轴:电阻Rs,e=18.4 Ω,磁极对数pe=13,电感Ld,e=Lq,e=27.5 mH. 光学系统的主要组成部分为高分辨率开窗口成像相机、用于实现精跟踪目的的PI压电陶瓷振镜、用于通信的雪崩光电二极管传感器等。扰动源的主要作用为模拟平台扰动,实现不同周期、不同加速度的扰动条件,为单端动态跟踪验证试验创造外部平台扰动条件。电控箱主要包括粗跟踪转台的电机控制器、驱动器,以及精跟踪振镜的控制器与驱动器、多路通信系统、图像处理板、供电板等。
实现通信终端系统动态跟踪的主要目的是在平台振动以及星间相对运动等扰动因素影响的条件下,将入射光斑稳定地跟踪在成像相机的视场中心。动态跟踪过程中跟踪子系统依据成像传感器上的光斑位置偏移信息计算出控制量,并在控制回路中完成校正,以实现对接收信号光束的瞄准过程。
潜望式激光通信终端系统方位轴动态条件下的粗精复合跟踪数据曲线如图5所示。单端动态跟踪伺服转台在外部平台扰动条件下,记录潜望周扫转台方位轴的跟踪情况。包括扰动波形、粗跟踪轨迹、粗跟踪误差、精跟踪轨迹以及粗精复合跟踪条件下的精跟踪误差。
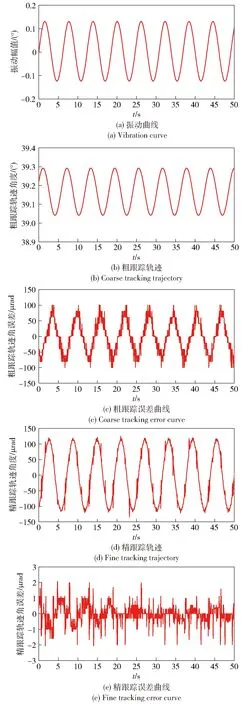
图5 方位轴动态跟踪曲线Fig.5 Azimuth axis dynamic tracking curves
下面依次对二维伺服转台在典型振动条件下的动态粗精复合跟踪结果进行分析。
图5(a)所示为方位轴系的正弦波扰动,扰动源用于模拟平台扰动周期为6 s、峰峰值为0.25°、最大加速度为0.137°/s2的正弦波扰动条件。在此动态扰动条件下,二维伺服转台的粗跟踪随动位置曲线如图5(b)所示,在此情况下,入射光斑经过粗瞄准机构校正后与成像相机视场水平方向中心之间仍存在一定偏差,其动态粗跟踪的误差范围为-100~100 μrad,如图5(c)所示。该粗跟踪实验结果表明,上述终端的跟踪控制系统设计可以在一定程度上有效抑制平台振荡。在粗跟踪基础上,需要进一步通过粗精复合跟踪方式来提高通信终端系统的抗扰动能力,提高激光链路的跟踪精度与稳定性。在粗精复合的模式下,利用成像相机开窗口模式下的高帧频反馈,采用振镜对动目标水平方向进行高精度快速跟踪,而潜望周扫终端利用振镜的实时角度位置作为粗瞄准转台的位置反馈值,完成复合跟踪过程的位置随动,复合跟踪后误差值被抑制到2 μrad以内,精跟踪轨迹以及跟踪精度分别如图5(d)和图5(e)所示。
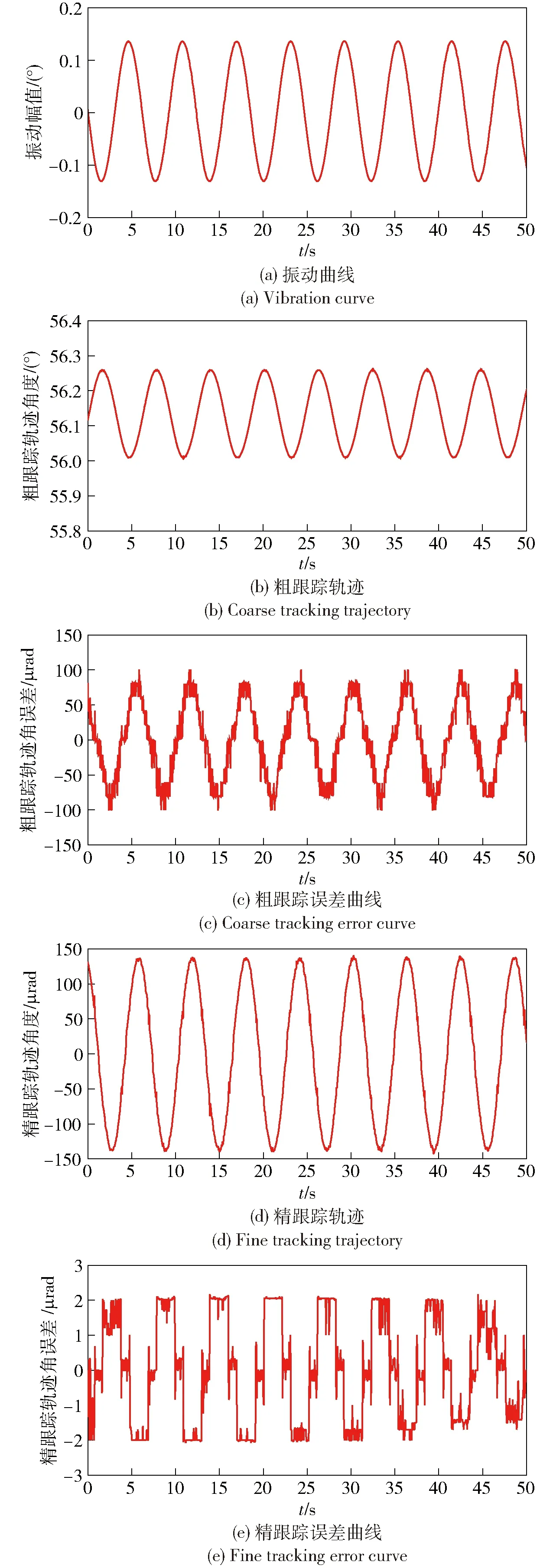
图6 俯仰轴动态跟踪曲线Fig.6 Elevation axis dynamic tracking curves
潜望式激光通信终端系统俯仰轴的粗精复合跟踪数据曲线如图6所示。同样在单端动态跟踪伺服转台外部平台扰动条件下,记录潜望周扫转台俯仰轴的跟踪情况,包括扰动波形、粗跟踪轨迹、粗跟踪误差、精跟踪轨迹以及粗精复合跟踪条件下的精跟踪误差。其中,图6(a)为俯仰轴系的正弦波扰动,扰动源用于模拟平台扰动周期为6 s、峰峰值为0.25°、最大加速度为0.137°/s2的正弦波扰动条件。在此动态扰动条件下,二维伺服转台的粗跟踪随动位置曲线如图6(b)所示,在此情况下,入射光斑经过粗瞄准机构校正后与成像相机视场垂直方向中心之间仍存在一定偏差,其动态粗跟踪的误差范围为-100~100 μrad,如图6(c)所示,该粗跟踪实验结果表明上述终端捕获与跟踪控制系统设计可以在一定程度上有效抑制平台振荡。在上述粗跟踪基础上,需要进一步通过粗精复合跟踪方式来提高通信终端系统的抗扰动能力,提高激光链路的跟踪精度与稳定性。在粗精复合的模式下,利用成像相机开窗口模式下的高帧频反馈,采用振镜对动目标垂直方向进行高精度快速跟踪,而潜望周扫终端利用振镜的实时角度位置作为粗瞄准转台的位置反馈值,完成复合跟踪过程的位置随动,复合跟踪后误差值被抑制到2 μrad以内。精跟踪轨迹以及跟踪精度分别如图6(d)和图6(e)所示。这种高精度的激光跟踪系统允许建立一个双向通信链路。
为了验证不同扰动条件下通信终端系统的动态跟踪能力,针对方位、俯仰轴系完成了平台扰动周期为3 s、峰峰值为0.15°、最大加速度为0.329°/s2的正弦波扰动条件下的跟踪测试,实验结果分别如图7和图8所示。由图7和图8可见,方位轴的动态粗跟踪的误差范围为-75~75 μrad,复合跟踪后误差值被抑制到2 μrad以内,俯仰轴的动态粗跟踪误差范围为-100~100 μrad,复合跟踪后误差值被抑制到2 μrad以内。实验结果表明此系统能够有效地抑制振动,也完成了对所设计的卫星光通信系统的地面验证实验,提高了终端伺服系统的速度平稳性以及复合跟踪过程的动态响应性能,在有效抑制转矩脉动的同时增强了系统的鲁棒性。
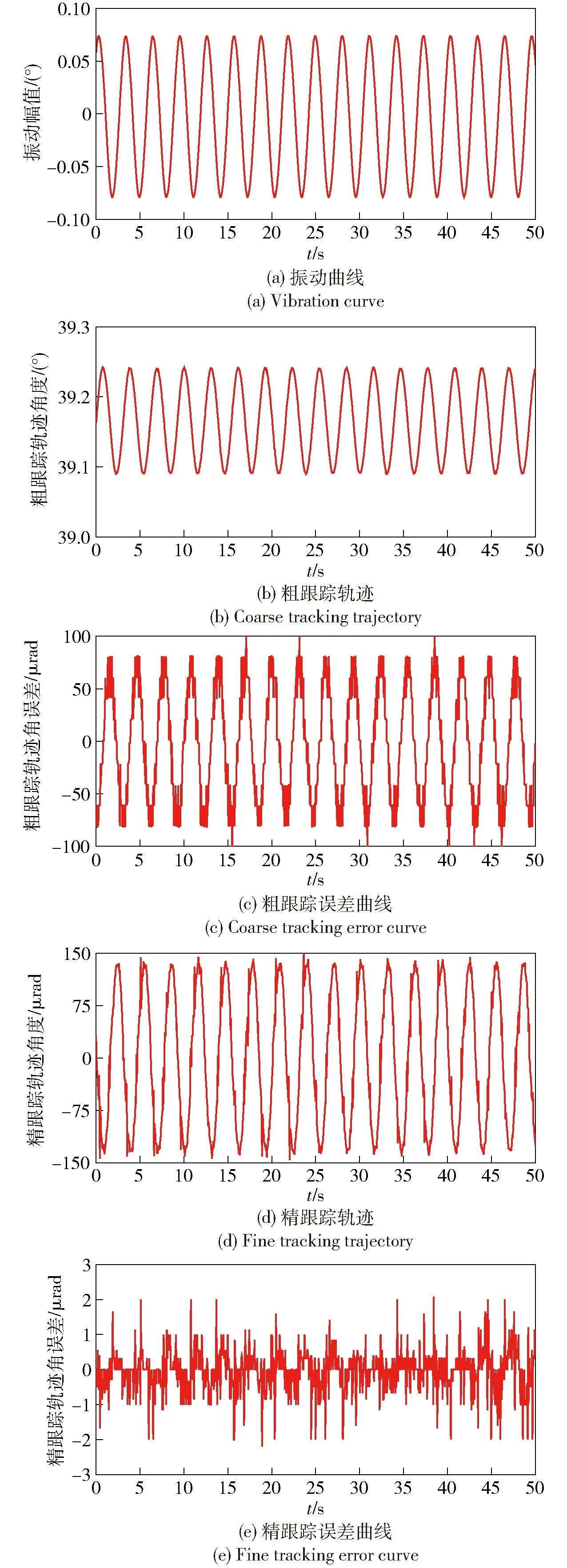
图7 不同扰动下方位轴动态跟踪曲线Fig.7 Azimuth axis dynamic tracking curves under different disturbances
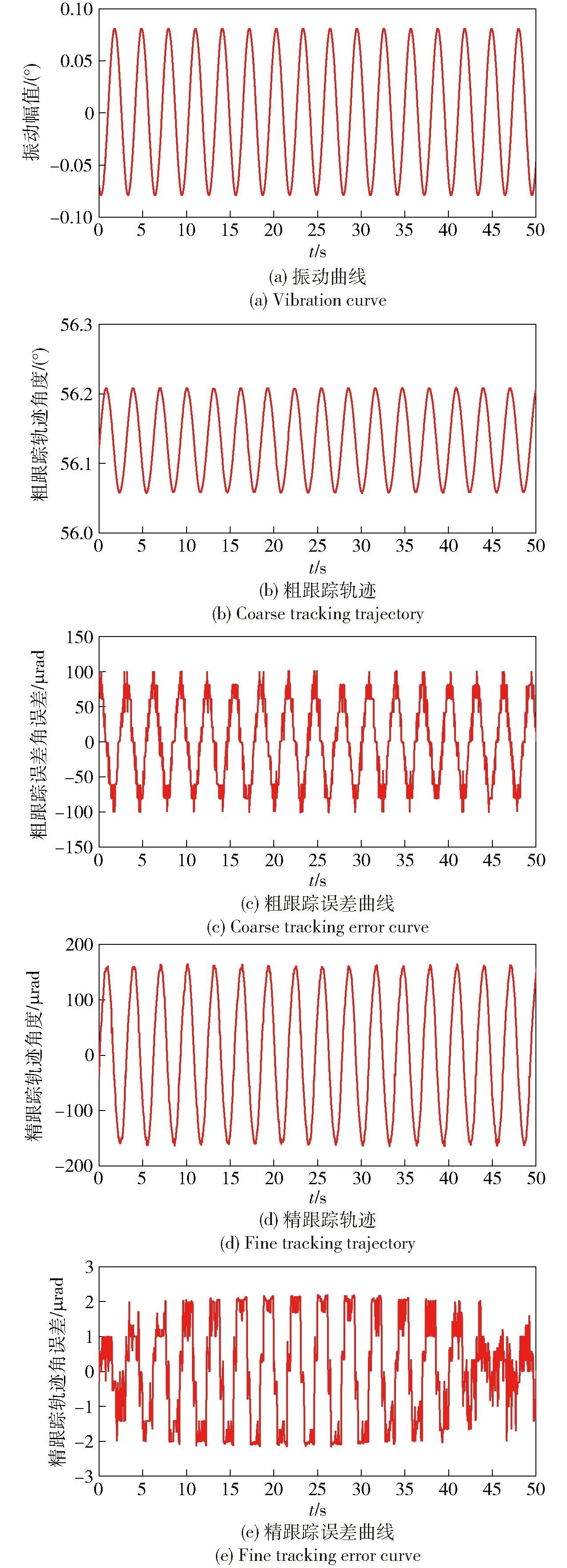
图8 不同扰动下俯仰轴动态跟踪曲线Fig.8 Elevation axis dynamic tracking curves under different disturbance
4 结论
本文针对基于永磁同步电机的潜望式激光通信终端系统抗扰动问题,引入一种模型参考自适应力矩估计方法,并用于通信终端系统内部电流环,通过降低系统中执行结构的力矩波动,使得控制系统的速度阶跃响应达到更高的稳态精度。另外,设计了潜望式激光通信的室内等效验证实验,搭建采用平行光管模拟平行入射光的室内单端动态跟踪实验,利用扰动转台模拟平台抖动,在最大加速度分别为0.137°/s2、0.329°/s2的正弦波扰动条件,二维伺服转台的方位轴、俯仰轴的动态粗跟踪误差范围为-100~100 μrad. 在粗精复合的模式下,为进一步提高跟踪精度,利用成像相机开窗口模式下的高帧频反馈,在平台扰动条件下粗精复合跟踪精度可以达到2 μrad以内。上述实验结果完全满足激光通信系统的建链需求,而稳定的跟踪算法与精度能够有效提高双向激光链路的稳定性,为激光通信终端动态跟踪伺服系统的设计提供了依据。
