基于激光点云数据的建筑物外立面测量与制图
2020-02-03魏进京
魏进京
(厦门市集美区测绘地理信息中心 福建厦门361024)
1 引言
在科技与经济快速发展的今天,许多新兴技术异军突起。与三维技术有关的包括有3D 打印技术、VR 实景技术与三维激光扫描技术,其中三维激光扫描与测绘行业息息相关。三维激光扫描在节省人力物力和时间的情况下,能够准确的扫描出所测量物体的点云图,并通过测量点与点之间的距离,来完成测绘的目的以及其他的任务。三维激光扫描技术的应用十分广泛,这项技术是正向建模的对称应用,也称为逆向建模技术[1-2]。
点云是逆向建模技术所得到的数据集合,顾名思义,是数量比较多的点的集合。这些点通常以坐标的形式表示,表示一个物体的外表面形状,也可以表示点的颜色、灰度值等等,它是由3D 扫描设备产生的[3-4]。
随着三维空间数据获取能力的提高和人们对三维空间信息需求的提升,城市地区的三维重建成为研究及应用的热点[5]。一方面,建筑物立面包含丰富和直观的细节信息,是建筑物三维建模不可或缺的组成部分[6];另一方面,随着人们的生活水平不断提高,无论是什么事情,都要求的比较高,越来越追求品质与效果,在购买房屋时,对外立面也有一定的要求。
三维激光扫描技术是非接触测量,能够快速、轻松、精确获取复杂物体和建筑物的测量结果,测量速度快、精度高,其结果能直接运用于多种软件,这使它在计算机辅助技术日益广泛的今天很受欢迎。本文以某校区建筑物外立面为研究对象,利用三维激光扫描仪获取建筑物外立面点云数据,基于高精度的点云数据,对点云数据进行拼接、去噪等处理,精确绘制二维线划图,输出CAD 立面图形文件[7]。
2 点云数据获取与处理
2.1 三维激光扫描仪
三维激光扫描仪,在部分地区有人叫“抄数机”,从字面意思简单理解就是抄下数据,主要用于采集被测物体的空间三维数据,并用于各种逆向工程。近年来,三维激光扫描技术不断创新发展并日渐成熟,三维扫描设备也越来越多应用于不同的领域,虽然扫描仪种类繁多,但其功能是相似的[8]。三维激光扫描仪不同于全站仪等测绘仪器系统,全站仪是单点测绘,获取的是单点坐标数据,目镜对准被测物体,激光发射出去一次测量一次数据[9];三维激光扫描仪是多点测绘,获取的是海量的点云数据,是在所设置的测量范围内,激光不停的测量,获取被测物体与扫描仪本身的空间关系,自动化程度较高[10]。三维激光扫描仪主要由激光测距仪、反射棱镜、内置数码相机、电源供应系统等组成[11-12]。
2.2 三维激光扫描技术基本原理
三维激光扫描技术是利用激光测距的原理,实现非接触的激光测距、测角等。通过发射激光不断测量,获得被测物体至扫描仪之间的距离、水平角、垂直角等信息,然后通过计算机计算得出被测物体的三维坐标信息,扫描过程中,利用自身水平和垂直马达等装置可连续地对空间被测物体按设定的取样密度进行上下左右前后全方位的扫描测量,得到被测物体的三维空间数据—点云[13-15]。
2.3 软件准备
(1)SCENE 软件:SCENE 软件是FARO 扫描仪专用的一款三维扫描数据处理软件,该软件可以很好的对FARO 扫描仪获取的三维场景进行处理、简化、拼接等操作,是较为直观有效的扫描数据处理和配准软件,只要将数据导入软件,用户可通过执行简单的测量操作即可进行自动处理。
(2)AutoCAD:CAD 是一种辅助绘图与设计的软件,用于二维绘图、设计图案等,经过不断的完善,已成为目前较为流行的绘图软件,可配合CASS 软件进行测绘的数字化成图,其将向智能化、多元化方向发展。
2.4 作业流程
三维激光扫描作业的主要流程如图1 所示,具体可以分为三部分:
1)实地踏勘,根据扫描对象确定扫描的范围、路线及仪器架设位置,确定合理的扫描距离、采样密度等相关参数设置,设计扫描方案;
2)数据获取,在拟定的路线上架设扫描仪,安置靶球,通过扫描测量获取被测物体的点云数据,并将其导入计算机;
3)数据处理,包括点云数据的拼接和去除噪点等操作,绘制建筑物外立面二维线划图。
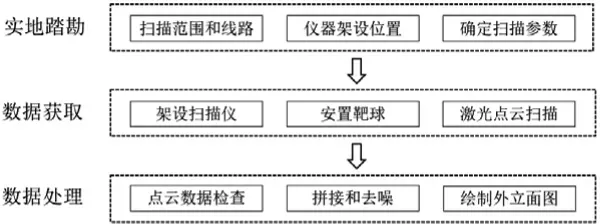
图1 作业流程图
2.4.1 实地踏勘
为了对实际的工作有更进一步的了解,同时为制定合理的测量方案,必须对被测建筑的周边环境进行现场踏勘,在踏勘过程中要注意查看已有点的位置、保存情况、可使用的可能性等,尽可能采用保存完好且精度符合要求的已有点;根据建筑物的高度、方位等特征初步拟定测量路线及仪器架设的位置,确定合理的测量距离、采样密度等,最大程度上保证被测建筑不被遮挡。此外,还要考虑到天气恶劣增加噪点的情况及所剩电量的使用时间[10];选点完成后,可通过绘制草图、拍照等多种方式制作点之记,以做记录方便后续测量工作的进行和测量方案的设计(包括测量路线、测量天数及各测站的时间安排和人员分工等),还可用于工程汇报的撰写。
2.4.2 数据获取
实地踏勘准备完成后,即可根据拟定的方案展开测量工作。首先我们需准备好外业所需的仪器,检查其电源、存储空间等,确认完成后再进行外业,以免返工。在所拟定的路线上架设好仪器,在参数设置选择合理的测量距离、采样密度、时间等,即可开始扫描,对被测物体进行扫描时,两两测站之间扫描范围要保证有一定的重叠度,这样有利于内业数据处理的拼接操作;测站之间要保持最优的距离,在保证作业精度的同时使工作量降到最小,测站至被测物体的距离也要保持同样的原则;尽可能保证扫描时被测物体不被遮挡,也要保证测站所扫描区域能够覆盖被测物体。多站点之间扫描的点云数据在处理时要进行拼接操作,这要求两测站扫描范围要有一定重叠以寻求公共的同名点,所以需要在测区内安置靶球,通过各站点扫描的数据自动求出圆心点,可以快速进行拼接操作。外业人员还需绘制现场的草图,并多角度对被测物体进行拍照记录,一来是为了记录外业过程中所选的测量方位,二来是为后续的内业绘图工作提供参考。扫描完成后,将生成的数据导入计算机中配合相应软件进行数据的处理。
2.4.3 数据处理
(1)首先进行数据检查:新建工程,将扫描的数据导入SCENE 软件,在工作区一次性加载全部的数据,打开其平面视图观察数据是否完整,如果发现数据不完整,则需要对不完整区域再次进行扫描。
(2)然后进行拼接和去除噪点操作:打开三维视图,可以观察到由无数点云构成的立体图像,在平面视图下利用“标记球体”工具标记两幅数据中的公共靶球并精确测得其坐标,通过对不同角度测得的点云数据重叠部分的信息进行拼接,得到完整的3D 数据图,如图2 所示,此操作的意义在于可以从整体上全面显示处各个数据,数据具有相同的拓扑结构;由于测站的位置一般位于被测物体的前方以便于全面扫描,但扫描得到的建筑点云数据中包含有大量的噪声点,如树木、行人、车辆等,我们需要根据实际进行删除噪点的操作,即去除不需要的点云数据。

图2 点云数据拼接完成
(3)最后绘制外立面:将处理完成的点云数据导出到XYZ 格式,以便于在CAD 中进行立面图的绘制。由于CAD 不能直接读取XYZ 格式文件,需要先转换为CAD 所支持的PCG 文件。利用“创建点云”的功能,添加SCENE 软件导出的XYZ 格式文件,即可得到Autodesk 文件,进行此操作后需要重启CAD软件,以保证数据可以有效使用;再次打开CAD 后,进行“附着点云”操作,即可将点云数据显示在CAD中,如图3 所示。
建筑外立面绘图不仅需要我们对图片的细心观察,还需要将图片和点云结合起来,进行绘图,通过点云分布情况和图片确定其表示的物体,图片上的细节也需要尽可能的还原到CAD 成图上,这就需要绘图人员要十分的细心并且细心地进行绘制。具体操作如下:

图3 点云数据在CAD 中显示
1)将坐标轴移动至点云上,打开对象捕捉中的节点捕捉,将坐标轴旋转至与点云平行。并调整其方向,进行绘图。
2)首先绘制墙体,利用CAD 的基本绘图操作,勾画出建筑尺寸,接着按照“从下到上”、“从左到右”、“从简到难”的原则逐层勾绘。
3)根据门窗等在外立面图上的位置,结合外业实际拍摄照片,绘制图形细节部分,对外立面瓷砖等部分进行图案填充,根据外业照片不断进行完善并标注,结果如图4 所示。

图4 外立面绘制成果图
3 精度评定
在建筑物里面测量方面,边长精度决定着最终立面图的精度,所以进行边长定位精度评价。
在三维激光扫描精度的评价中,采用的是边长对比分析方案,即将在点云数据中量取的特征边的长度和采用2″级全站仪测量出的特征边的长度做对比分析。该方法可以成为三维激光扫描仪边长定位外部精度符合评价方案。采用该方案进行试验,得出三维激光扫描仪和高精度传统测量仪器之间的精度对比,从而可以得出三维激光扫描仪获取的点云数据的精度水平,结果直观可信。
采用2″级全站仪和FARO 三维激光扫描仪对同样的10 条边进行长度观测,每条边观测6 次,得出数据如表1、表2,数据对比如表3。

表1 三维激光扫描仪测量边长

表2 全站仪测量边长

表3 全站仪和三维激光扫描仪数据对比
由表3 对比结果可知三维激光扫描仪测量数据与全站仪测量的数据较为接近,尤其是1、7、8、10 号线差值均达到毫米级,由此可得出结论,三维激光扫描仪测量精度完全可以达到测量建筑物立面图的测图精度,而且大大提高了数据采集的工作效率,节约了大量人力物力。
4 结束语
本文通过某校园建筑实例对三维激光扫描的作业流程和建筑物外立面的绘制作了详细的描述,并对所绘制的立面图进行精度评价分析,实验结果证明与传统测量技术相比,使用三维激光扫描进行建筑物外立面测量与制图制图能够提高设计自动化程度,在保证高精度设计的同时,缩短了数据获取时间,大幅度提高了工作效率。三维激光扫描技术是测绘界的一项技术革新,具有超强的三维建模和虚拟重现的功能,适用于多种逆向工程,该技术在未来的应用中会更加趋向自动化、智能化,会有更大更好的发展空间。