智慧路灯雨水收集与调控策略研究
2020-02-02张国泉李俊杰赵崇杰姚宇茏骆少明
张国泉,李俊杰,赵崇杰,姚宇茏,黄 福,杨 勇★,骆少明★
(1.广东技术师范大学,广东 广州 510635; 2.广州长仁工业科技有限公司,广东 广州 511338)
0 引言
智慧城市作为城镇化的终极发展方向,在其发展过程中,各大城市仍存在较多问题.一方面是暴雨连袭及排水管道不畅而造成的城市内涝事故.另一方面是传统的路灯不能配合其它路面感知技术和装备,使得路灯无法实时检测气象和安防等功能.
“逢雨必涝”的城市顽疾,为何久治不愈[1]?城市的降雨量超过了其自身的排水系统的极限,导致城市内涝不时发生.目前,国内学者对雨水控制利用进行过一系列研究.徐美[2]等通过精细化洪涝模型,实现了全程模拟雨水在河道、地表、管网的流动情况,为城市内涝的识别与预警提供有力的数据支撑.任伯帜[3]提出了雨水径流的设计方法,为城市的排水系统的设计以及城市雨洪调控等提供有效工具.
张嫣和裘鸿菲[4]通过对城市的降雨汇水路径进行分析,从另一个层面上设计了湖水与绿地共融的城市雨洪安全格局.李佳[5]对于雨水控制利用工程的现行规范进行解析,广州市雨水调蓄入渗及雨水回收利用系统设计重现期可提高到五至十年,以抵抗大暴雨或特大暴雨.刘楠楠等[6]对雨水资源化利用工程所存在的问题进行归纳,得出影响雨水资源的利用效率的原因是缺乏多个单项技术的系统化应用,导致雨水的收集、存 储、输送与利用联系不紧密.城市发生内涝有历史的、现实的原因,而根治则需集合各方面智慧.
暴雨强度、雨水的径流计算模型、内涝的识别等都已具备了成熟的理论支持,但排水系统的设计与调控还不够完备.城市内涝、照明信息化水平低下已然成为当下各大城市亟待解决的问题.为此,本文设计了一种能自动调控雨水流量、收集存储雨水与太阳能、体积小、结构简单的智慧路灯,为智慧城市生态系统建设提供一定支撑.
1 智慧路灯的三维模型设计
针对现有路灯安装后不可拆卸、升降、笨重等关键技术问题,对高效雨水、阳光收集装置结构、雨水通道、升降关键零部件等进行创新优化设计,本文建立高效雨水、阳光收集装置的三维优化模型和参数化设计系统,如图1所示.

图1 智慧路灯结构示意图Fig.1 Structure diagram of smart street lamp
智慧路灯的灯杆内部为空心,灯杆两端为开口,水箱安装在灯杆的下部,灯杆和水箱相连通.灯杆上部的开口安装挡板,太阳能光伏板转动式安装在灯杆上部,太阳能光伏板可随太阳的变化而转动,雨水经过太阳能光伏板进入半圆柱筒雨水收集台.太阳能光伏板和挡板、半圆柱筒雨水收集台、空心灯杆、水箱共同形成雨水收集器.蓄电池和路灯安装在灯杆上,蓄电池和太阳能光伏板、路灯电连接.本装置能根据降雨量大小实时自动调控阀门开放大小与方向,在大降雨量的时候,开启调控系统阀门,利用水泵将水箱中的雨水抽至蓄水池.
2 伺服电机及抽水泵的建模
本文研究的是抽水系统的动态特性,先将系统分为几大部分,再对各个部分建立数学模型,这是比较常见的数学模型建立的方法.通过分析系统后,将其分为两个子系统、分别建立其数学模型、最后集总建模三个阶段[7]. 本文将抽水系统分为两大模块,分别是直流伺服电机调速模块、抽水泵模块,图2为伺服电机与抽水泵控制系统图.系统的被控对象为路面水位的高度,位移传感器作为系统的反馈检测元件.

图2 伺服电机与抽水泵控制系统图Fig.2 Servo motor and pump control system diagram
2.1 伺服电机数学模型建立
本文将伺服电机简化为一阶环节,第一个模块为交流调速模块,该模块主要是控制定量泵的流量,模块中的电机和定量泵是连接在一起的,连接器对系统的影响小,故可忽略,伺服电机数学模型[7]:

式中,Ne( s)为电机转速(r/s),U(s)为输入电压(V),Kv表示速度增益(r/s/v),Tm表示时间常数(s).
2.2 抽水泵数学模型建立
抽水系统通过伺服电机的转动,来控制泵体的抽水量,每个定量泵的抽水量是不变的.在系统建模时,确保以下假设成立:
(1)泵的流动状态是层流.
(2)不会出现压力饱和的现象.
(3)忽略泵的流量脉动.
因此,抽水泵的输出流量为[7]:
3 伺服电机及抽水泵控制系统综合模型
由以上各个模块的数学模型可以得到抽水系统传递函数框图.当电机转动时,抽水泵开始抽水,系统的数学模型框图如图3所示:

图3 伺服电机及抽水泵控制系统综合模型Fig.3Integrated model of servo motor and pump control system
本系统的闭环传递函数为:

式中,A为实验区域面积(m2).
本文利用MATLAB根据表1系统参数进行实验仿真,模拟当降雨量超过预设值时,启动抽水泵进行抽水,能否快速将雨水水位降低至预设值.

表1 泵抽水水位控制系统参数Table1 Parameters of pump level control system
4 模糊PID控制器及算法研究
目前应用较为精确的控制器是模糊PID控制器,其具有鲁棒性强、结构简单的特点.抽水泵抽水会因为外界温度的变化而造成干扰,因此采用模糊PID控制器可以增强抗干扰的能力.
4.1 模糊PID控制器设计
由于抽水泵需要在外界存在干扰的情况下进行抽水,为了提高抽水泵的调节精度和调节速度,采用PID控制策略可以有效提高抽水泵响应速度.PID控制器中的比例系数是影响抽水泵的调节速度,积分环节是用于调节系统的误差,提高精度,微分环节是为了防止系统出现超调现象.
PID控制主要是对PID的参数进行整定,但在很多情况下,系统存在非线性的问题,如果采用传统PID的控制方法,其精度可能达不到期望值.故选择模糊PID控制,让模糊规则自动推理出PID最佳参数.以误差e及误差变化率ec为输入,自动完成PID参数的自整定.设计的模糊控制器如图4所示[8]

图4 模糊PID控制器结构Fig. 4 Structure of fuzzyPID controller
4.2 模糊PID控制算法与模糊规则的设计
PID控制的表达式[9]如式(5)所示:

式中,u(t)为PID控制的输出,e(t)为PID控制的输入,KP为比例系数,KI为积分系数,KD为微分系数.
模糊PID控制算法能对当前系统的误差及误差变化率进行调节,根据模糊规则进行推理,实现对PID参数的自动调节,增强系统的抗干扰能力.KP、KI、KD整定如(6)(7)(8)所示:

将误差e及误差率ec作为系统的输入为系统的输出,输入输出的模糊子集为{NB、NM、NS、Z0、PS、PM、PB},分别代表负大、负中、负小、零、正小、正中、正大.设置输入输出论域为[-3,3],量化等级设置为{-3、-2、-1、0、1、2、3}[10].选择输入隶属度函数与输出隶属度函数分别为高斯函数、三角形函数,误差e及误差率ec的隶属度函数如图5所示:

图5 误差e及误差率ec的隶属度函数Fig. 5 Membership function of error e and error rate ec

表2 ΔKP 参数调节模糊规则表Table 2 Fuzzy rule table of ΔKP parameter adjustment

表3 ΔKI 参数调节模糊规则表Table 3 Fuzzy rule table ofΔKI parameter adjustment

表4 ΔKD 参数调节模糊规则表Table 4 Fuzzy rule table ofΔKDparameter adjustment
5 雨水调控仿真实验结果及分析
根据模糊规则,在MATLAB 中的simulink进行系统的搭建,模拟在900m2区域内,5min 降雨量为10500L ,即水位高度约为12mm ,输入雨水水位预设高度为10mm . 在Simulink上搭建好数学模型[12],通过不断调试,设定模糊PID控制器的3 个参数初始值分别为时,控制效果较好.由此,可以得到以下的仿真图:
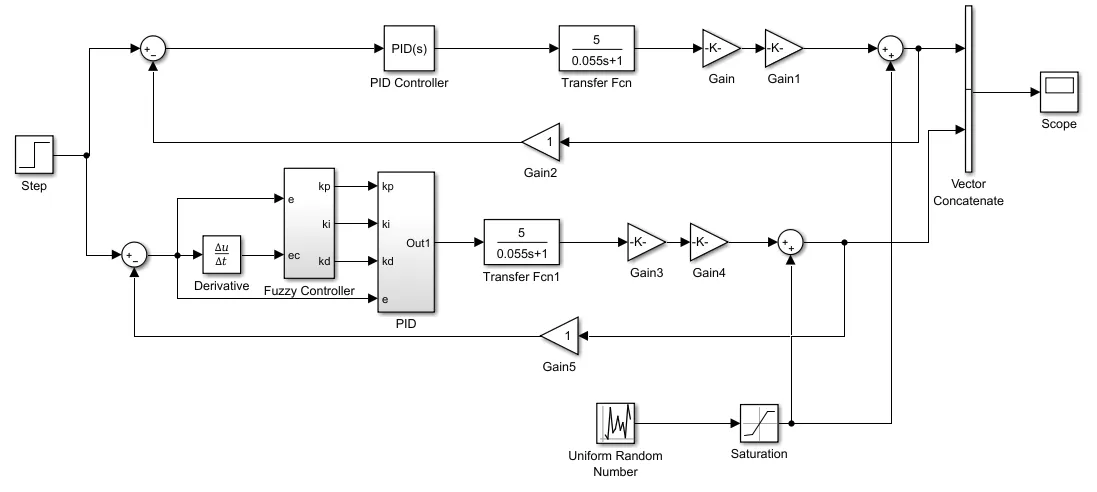
图6 伺服电机及抽水泵控制系统模糊PID控制图Fig.6 PID control chart of servo motor and pump control system

图7 控制系统响应图Fig.7 Response diagram of control system
图6为本文研究的抽水泵控制系统PID控制图.系统仿真实验搭建完毕后,开始仿真实验.在Simulink上输入一个水位高度,将仿真时间设置成0.5s,可以得出传统PID调节时间大约为0.2s,引入模糊控制后,系统调节时间大约为0.1s,响应速度得到明显的提高,调节时间更为迅速.从图7中可以看出,模糊PID控制的调节时间为0.1s,即暴雨天气下,当雨水水位超过设定值时,启动抽水泵进行抽水,0.2s后即可将雨水水位降至设定值.

图8 加入干扰的控制系统响应图Fig.8 Response diagram of control system with disturbance
图8为本文研究的抽水泵控制系统在加入干扰后的系统响应图,在0.3s时加入干扰,传统PID调节的时间大约为0.04s,进入稳定状态的速度较慢,而在引入模糊规则后的PID控制,调节的时间大约为0.02s,响应速度较传统PID快,由于加入模糊控制后,控制器的参数能够根据目前的系统状态做出相应的PID参数调整.所以,引入模糊规则的PID控制器比传统PID控制器的鲁棒性更强、响应速度更快、稳定性更好.
6 总结
本文针对大降雨引起的城市内涝、道路淹堵以及能源紧缺等一系列问题,提出了一种利用智慧路灯收集雨水和自动调控雨水流量的策略.首先利用三维绘图软件SolidWorks对智慧路灯进行建模,设计了一种能自动调控雨水流量、收集存储雨水与太阳能、体积小、结构简单的智慧路灯.接着,以智慧路灯为平台,通过对抽水泵进行改装,对抽水泵位置控制系统建立数学模型,在MATLAB中的Simulink进行实验仿真,传统PID 控制的抽水泵位置控制系统的水位响应曲线较平滑,无超调量,稳态误差较小,但进入稳定状态的时间长.引入模糊规则后的PID控制器,系统响应时间短,无超调量,误差小,显示该系统工作状态良好,响应速度较快,稳定性和适应性较好.在加入干扰后,模糊PID控制器比传统PID的响应时间短,稳定性好.即在暴雨天气下,当雨水水位超过预设值时,启动抽水泵进行抽水,可以快速将雨水水位降至到预设值.