农机可视化调度系统的设计与应用
2020-02-02余永久顾晶晶王立泽
余永久,顾晶晶※,王立泽
(1. 苏州京卓智信息科技有限公司,江苏苏州215000;2. 江苏海洋大学海洋技术与测绘学院,连云港222000)
0 引言
农业机械化和农机装备是转变农业发展方式、提高农村生产力的重要基础,是实施乡村振兴战略的重要支撑[1]。根据2016年《中国农村统计年鉴》的统计,2004—2015年我国农用机械总动力从6.4亿kW增长到11.17亿kW,增长74.5%(国家统计局农村社会经济调查司,2016年)[2]。2017年关于深入推进农业供给侧结构性改革的发展意见中提出实施智慧农业工程,推进农业物联网试验示范和农业装备智能化[3]。2018年12月国务院提出要满足亿万农民对机械化生产的需要为目标,以农机农艺融合、机械化信息化融合,推动农机装备产业向高质量发展转型,推动农业机械化向全程全面高质高效升级[1]。农业机械化和智能化成为我国农业发展的必然趋势,给我国农业发展带来新的格局,快速提高了农业生产的作业效率、释放人力,带了经济效益的显著提升。随着农机作业的高速普及,我们也仍然发现普遍存在一些问题,比如受各地的地理环境影响、农机的调度不合理、农机作业不规范、缺乏有效的监控手段、作业的面积难以精确核算等[4-5]。
物联网技术提供了基于网络的物物相连技术,通过信息传播媒介进行信息交换和通信,能够感知农机的作业状态[6]。全球定位系统在精确农业以及农机作业管理中得到了广泛应用[7]。因此将信息化手段结合3S和物联网感知设备运用于农业机械化作业,能够加强对农机的实时监控、全过程监督以及农机资源的合理调度。20世纪80年代末,美国开始在农作物收割、播种、灌溉等农业机械上运用GPS监控技术,改善传统的农业生产模式[8]。国内早在2013年黑龙江省建设了升级农机资源管理指挥调度中心,结合3G、GPS、GIS等技术,实现对农机资源的日常管理、生产调度、售后远程服务等多项功能[9]。目前国内包括北京市、上海市、许昌市等全国各个区域都建成了农机资源调度指挥中心。
5G技术、物联网技术、3S技术的快速发展,给智慧农业发展带来了新的技术和思路,进一步解决了数据传输断点延迟、作业面积难以核算、农机资源调度不合理、跨区作业难监管难等问题。如何在农机智能化的基础上,进一步提高农业生产水平、合理优化农机资源分配、促进农民增收,指导农民精准作业,同时也为政府加强监管、发放补贴提供管理依据。文章主要是以深松机作业为背景,基于GIS技术,利用定位设备、深度传感设备、智能调度终端等对整个系统进行了设计并实现,系统以5G智能手机、PC浏览器为终端,面向广大农机企业、农民以及农机手等提供农机定位查询、农机分布查询、农机远程调度等农业行业应用产品,为农机化信息服务的智慧化提供一种新的思路和手段。
1 系统设计目标
农机深松整地是改善耕地质量,提高农业综合生产能力,促进农业可持续发展的重要举措[10]。系统以深松机作业为背景,以智能农机装备、物联网感知设备为基础,通过信息化手段实现精准农业,实现农机作业的数字化管理、科学化调度,推动农机作业效率的快速提升,为提高农机作业质量提供技术支撑,推进农机产业向智能化、现代化发展。系统能够对农机作业全过程进行监控,实现对农机作业信息的实时动态监测、及时预警、远程可视化调度管控、面积核算等,有助于科学合理调度农机,提高农机作业效率、节约成本投入,同时能够精确核算作业面积为农机补贴发放提供依据。系统主要包括农机实时监控、农机作业云图管理、农机调度管理、松土面积核算、报警管理、农机运营可视化等模块。
2 系统总体架构设计
2.1 系统开发技术架构
农机可视化调度系统为B/S(浏览器/服务器)结构,基于.NET框架,采用C#语言进行开发,开发环境使用Visual Studio 2019。系统从开发技术架构的角度分为数据/服务层、业务层和用户层3个部分,具体交互关系如图1所示。
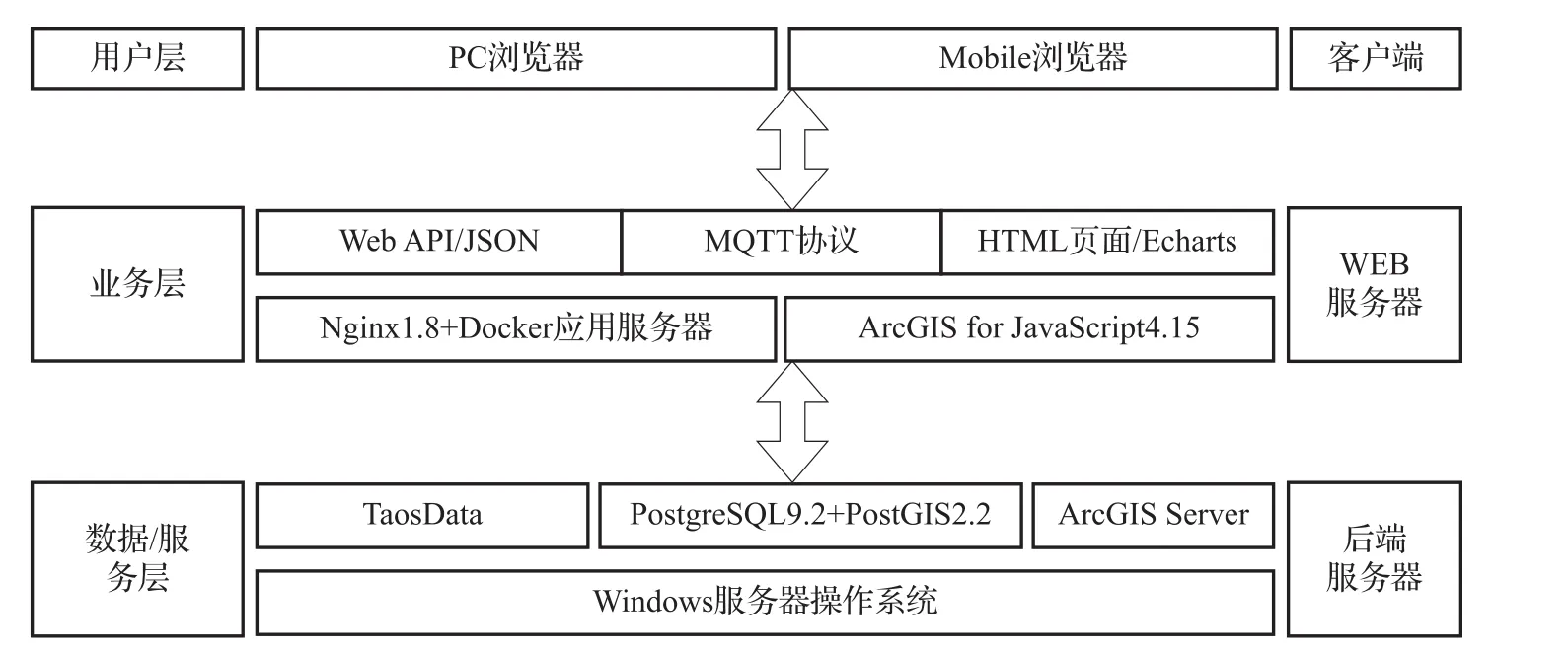
图1 系统开发技术架构Fig.1 Technical architecture diagram of system development
(1)数据/服务层。数据管理以及发布服务,为业务层提供数据服务支撑。系统严格按照数据标准支持对静态数据和动态采集数据的规范化管理,能够对多协议设备数据进行自动化采集、处理和发布,业务层根据业务需要进行数据调用。系统环境采用Windows服务器操作系统,数据按照性质分为两类,分别为空间数据库和属性数据库,采用PostgreSQL进行管理,空间数据引擎采用PostGIS平台;地图服务发布采用ArcGIS Server平台。同时,系统设计考虑大量监测数据的并行处理、访问效率,经过论证后采用TDengine大数据平台,能够极大的提高数据处理和访问的效率,提高用户的交互体验。
(2)业务层。是农机可视化调度系统的核心,根据实际业务需要进行业务逻辑设计,负责对底层数据业务逻辑处理,为用户提供可视化交互界面,将用户与数据联系起来,具有中间桥梁作用。该系统的业务层主要是针对农机可视化调度设计实时监控、轨迹回放、可视化调度等业务。业务层应用服务器采用Docker和Nginx。前端设计方面,主要是可视化图表和地图服务设计,其中图表主要采用Echarts组件,地图服务的调用和专题地图的生成使用ArcGIS API for JavaScript。采用WebAPI/JSON完成该平台与第三方平台的数据对接。
(3)用户层。采用WEB方式访问,主要是接收用户的请求,为用户提供了交互工具,系统为管理人员和驾驶员提供系统访问入口,便于用户操作。系统主要分为管理端和大屏端两个访问端,管理端主要是便于日常监管,大屏端主要是针对管理人员进行可视化调度和决策。
2.2 数据库设计
数据是基础性战略资源和核心生产要素,系统整合相关农业信息资源,同时加强标准化建设。系统数据具有空间性和多样性的特点,考虑数据的复杂性,需要事先制定数据标准,便于统一、规范化管理。系统涉及的数据包括:多协议的物联网传感设备实时监测数据、空间地理信息数据以及与第三方平台对接的数据。因此系统将数据库设计为空间数据库和属性数据库,分别制定数据的处理、存储、调用标准,具体指导后期的数据执行。
空间数据库主要包括:农田所在地区的卫星地图栅格数据、农场分布位置、农机运行轨迹、松土面积、作业面、农机实时位置等矢量数据。为了便于对空间数据的维护与修改,矢量数据的属性数据统一存入属性数据库,将矢量要素唯一标识码作为相应属性数据关系表的主键建立关联。属性数据库里主要为基础的管理信息和空间数据对应的属性信息,包含现场管理农机油耗、农机运行速度、松土管理、设备管理、基础管理、机构部门、人员管理、权限管理等业务数据。
2.3 平台架构
从农机可视化调度系统的业务需求出发,对整个平台架构进行设计,整个架构一共可以分为5个层次和两大保障体系,分别为基础设施层、数据层、支撑层、应用层、用户层,平台架构如图2所示。
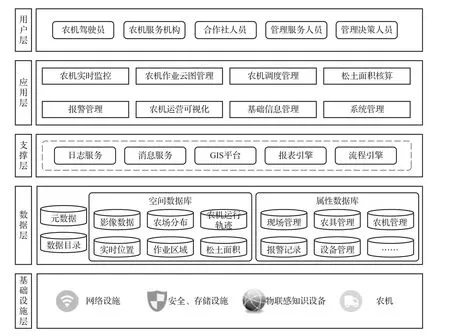
图2 平台架构Fig.2 Architecture diagram of platform
(1)基础设施层。包括网络设施、安全设备、基础的存储、物联网感知设备等;物联网感知设备具有超强的环境感知能力和智能性,包括深度传感设备、GPS定位设备、智能调度终端、物联网卡等,采集深松机实时作业的监测数据,通过网络设施进行数据传输,并通过主机设施、存储设施等存储,是数据层的重要支撑。
(2)数据层。指系统所涉及到的数据按照制定的数据标注进行分类、统一、规范化管理形成的数据集,包括用于管理数据的元数据、数据资源目录、空间数据和属性数据。空间数据主要包括实时和历史的地理信息空间数据;属性数据主要包括基础管理信息和农机运行产生的相关属性信息数据。
(3)支撑层。是支撑系统运行的中间件及服务支撑,包括日志服务、消息服务、GIS平台和流程引擎、中间件等。
(4)应用层。是根据实际业务需求,对实时采集的各类感知信息进行综合加工和智能分析,辅助以统计、分析等手段,为农户、管理人员等提供个性化、智能化服务。系统主要是对农机的实时监测、作业面积监测、农机调度管理等,便于加强对农机作业全过程的管理、能够合理调度农机资源,优化作业路径等,提高农机作业效率。
(5)用户层。是系统面向的具体应用对象,包括农机操作人员、农场人员、农机服务机构,以及农业局的管理者和决策人员。通过严格的权限管理机制,能够合理控制系统访问权限。
(6)标准规范体系、运维保障体系是贯穿系统建设的各个层面,为系统建设提供保障和支撑条件,确保农机可视化调度系统安全、可靠、持续运行的必要条件。
3 系统功能模块分析
农机可视化调度系统从功能设计上主要分为8个模块,分别包括农机实时监控、农机作业云图管理、农机调度管理、松土面积核算、报警管理、农机运营可视化、基础信息管理、系统管理。具体功能模块如图3所示。

图3 平台功能模块Fig.3 Function module diagram of platform
3.1 农机实时监控模块
通过安装在农机上的车载定位设备、深度感知设备实现农机作业车辆的实时位置的查看与追踪以及松土机的作业状态,包括农机实时GIS位置、地址、作业深度、速度、方向等信息,同步实时预警农机违规行为。根据农机作业位置,形成轨迹路线。用户可以在地图上看到所有农机的空间分布,且只需要在系统内绑定到对应的农机上,就可以查看农机的实时作业状态,便于对作业全过程的监管。
(1)实时作业状态监管。实现车辆实时信息的采集,能够根据作业任务的指定区域准确判断车辆是否在存在跨区作业的行为;同时在系统上表示当前农机的作业状态。
(2)实时农机作业状态。系统对农机作业状态实时监测,点击具体农机可以查看其作业状态、作业深度、所在位置、作业速度、作业人员等详细信息。
(3)实时告警。农机在跨区域作业、超速、作业不达标等违规行为出现时,进行实时预警,提醒监管人员进行及时提醒。
3.2 农机作业云图管理
农机作业云图是根据农机实际作业的深度在地图上生成带有空间位置信息的作业云图,直观反映农机作业情况。
(1)松土作业云图。系统能够根据农机作业的情况实时生成作业云图,也可以根据某个时间段查看历史云图。云图根据作业的平均深度分级显示,用不同的颜色进行区分展示,直观展示作业的合格情况。同时云图上可以直接查看作业区的距离与经纬度坐标。比如在内蒙某些地区深松为了能打破犁底层,深度一般要大于25 cm,不超过40 cm,则系统设定低于25 cm为红色,25~40 cm之间为绿色,高于40 cm为橙色,配色支持自定义。不同地区的深松的要求不一样,可以根据当地实际情况进行设定。
(2)历史轨迹回放。系统能够记录农机所有的实时监控作业信息,管理人员可以根据驾驶人员、作业车辆、作业时间进行查询,并且能够进行作业轨迹的额回放,便于管理人员核实历史作业状态。
3.3 农机调度管理模块
随着农机作业的高速普及,随之出现了农机资源调度不合理、跨区作业难以监管等问题。通过在农机上安装车载调度终端,实现农机车辆的日常监管、日常任务派发、智能优化作业路径、应急调度。
(1)日常作业任务。根据作业任务,管理人员可以根据作业量、作业区域等形成日常的作业任务,并且派发给指定驾驶人员,包括作业区域、作业要求、作业时间等信息。驾驶人员上车后,进行签到确认作业任务。任务完成后需要再次进行确认。
(2)智能优化作业路径。系统能够根据目前农机的作业状态、位置分布、任务完成情况,进行智能优化作业路径,合理分配农机资源。
(3)应急调度管理。农机在作业过程中出现突发问题不能继续作业,可以紧急调度另外一辆进行作业;天气恶劣的情况下进行作业规则的调整管理,系统形成调度记录,并标识调度记录持续时间。
(4)报警提示。系统将预警信息实时发送到农机对应的调度终端,提醒驾驶人员存在异常预警,便于及时调整作业情况。
3.4 松土面积核算模块
农机松土面积核算模块主要依据农机实际作业的运行轨迹进行作业面积的核算,系统能够有效核算重复作业的面积,由此作为补贴发放的依据。根据作业面积核算情况,对农机作业质量进行评估统计,由此作为对作业情况的考核依据。
(1)作业面积核算。系统能够记录农机作业的运行历史轨迹,通过对作业轨迹进行对比,能够识别重复作业的面积,并自动去重,准确核算实际作业面积,作为农机作业补贴的发放依据。
(2)作业质量考核。系统设定了农机作业的考核标准,主要从实际作业面积、有效作业深度、作业违规记录情况三个维度进行综合评估考核,能够加强对农机作业的考核监管,有效提高农机作业的质量。
(3)作业面积统计。对作业面积的情况的统计,包括作业面积、松土质量合格面积、合格率等信息的统计,并以可视化图表的形式直观展示。
3.5 报警管理
农机根据作业任务在指定作业区域、按照规定的速度、作业深度进行作业,如果存在跨区作业、违规超速、深度不达标、异常离线等情况,系统会发出预警信息,及时提醒驾驶员、管理人员,便于加强农机作业的规范性。
(1)报警记录。系统记录产生所有的报警消息记录,可以按照人员、报警类型等条件进行筛选,便于发现高频违规行为和人员,便于针对性的进行作业指导。
(2)报警规则管理。报警规则主要从作业区域、行驶速度、作业深度、作业状态几个维度进行设置,管理人员可以设置规定的范围,一旦实际作业超过规定的范围系统按照规定的时间间隔发送预警消息。
3.6 农机运营可视化模块
农机运营可视化模块是对整个农机运作情况的总览,能够以可视化的形式直观展示农机作业的情况,形成“一屏掌握全局”,辅助管理者了解辖区情况,辅助提高监管水平、加强区域内农机社会化服务水平及提升农机作业质量。
(1)基础要素一张图。在地图上展示农场、合作社、作业区域等重要信息的空间分布位置。
(2)农机分布一张图。在地图上展示农机实时的空间分布位置、作业状态信息,了解农机的分布情况和作业情况,紧急情况可以对农机进行一键调度。
(3)作业质量分析。在大屏端展示农机的作业云图,可以根据区域、作业时间进行筛选,同时以图表的形式展示作业合格率、违规情况统计及排名。
(4)作业完成情况统计分析。对各个区域的深松完成情况进行统计,了解当前完成进度,也作为补贴发放的依据。
3.7 基础信息管理
基础信息管理主要是建立农机基础信息档案,科学有效的管理相关基础信息,全面掌握辖区内的基础信息,便于统一管理和调度。
(1)农机管理。对所有农机数据的统一管理,农机信息包括农机的车牌号、品牌、购入时间、驾驶员、联系电话、所属农场等。
(2)农具管理。对所有农具数据的统一管理,农具信息包括作业类型(间隔深松机和全方位深松机)、补贴金额、作业深度、作业速度范围等。
(3)驾驶员信息管理。对所有驾驶员信息的统一管理,驾驶员信息包括联系方式、地址、所属农场等。
(4)农场管理。对区域内所有的农场信息的统一管理,农场信息包括名称、所属区域、地址、负责人等,农场可以绑定具体的地理位置,便于查看实际空间位置。
(5)监测设备管理。目前系统内涉及监测设备包括GPS定位设备、深度感知传感器、智能调度终端,对所有设备进行统一管理,设备信息包括:设备名称、设备类型、购入时间、对应农机等信息。
3.8 系统管理模块
系统管理模块主要组织机构管理与角色管理、权限管理、开发配置管理,系统能够通过用户角色进行权限控制。
(1)组织机构与角色管理。组织机构主要是对组织部门信息、电话以及联系人等信息,和一些岗位信息及人员管理等方面的信息进行设置与管理。角色在组织机构的基础上设定用户角色,根据角色进行权限的设定,能够控制用户的访问权限。
(2)权限管理。权限管理主要是对整个系统的有关权限进行设置,主要包括一些功能权限以及人员权限等方面。
(3)开发设置。主要是对系统的基础信息字典等内容的设定,比如设备类型、作业状态、区域等。
4 结论
农机可视化调度系统,依托物联网感知设备、GPS定位设备、智能调度终端,实现农机作业的全过程监管、可视化调度管理,促进精准农业发展,在提高作业效率、作业质量的同时能够合理调度资源、节约成本投入。该系统除了重点加强农机作业过程和作业质量的全过程监管提高作业效率和质量以外,还解决了几个核心问题:(1)智能调度优化,能够根据当前的作业任务、农机作业状态、作业完成情况进行合理优化,分配作业任务,能够实现农机资源的精准、合理利用。同时,智能调度在出现农机故障等情况还能够及时应急调度,保障作业任务快速高效完成;(2)作业面积核算,能够对作业面积进行去重分析得到有效作业面积,作为农机补贴发放的依据;(3)作业质量统计,首先系统能够根据平均作业深度计算规定深度范围内的合格率,此外能够依托GIS地图生成作业云图,用不同的颜色区分展示直观反映作业质量情况。农机可视化调度系统利用新技术与农机智能装备在农业生产上的融合,更加节能高效,推动智慧农业、精准农业的发展。