一种基于粒子群寻优的无模型自适应控制方法
2020-01-25杨龙飞王琦王蓉郑光廷陈龙胜
杨龙飞 王琦 王蓉 郑光廷 陈龙胜

摘 要:针对倾转翼飞机过渡段时变、强耦合、非线性等特点,利用基于数据驱动的无模型自适应控制理论设计过渡段飞行控制器,使用粒子群优化算法解决无模型自适应控制器调整参数的问题。仿真结果表明,基于数据驱动的无模型自适应控制器可实现倾转翼飞机过渡段平稳飞行,同时证明了基于数据驱动的无模型自适应控制方法在处理时变、强耦合的非线性系统时具有独特的优势。
关键词:倾转翼;数据驱动;无模型自适应;粒子群优化; 飞行控制
中图分类号:TJ765
文献标识码:A
文章编号:1673-5048(2020)06-0074-05
0 引 言
倾转旋翼飞机综合了直升机和固定翼飞机垂直起降、悬停、平飞速度快、大航程等特点[1-2],能够完成多种飞行任务,是飞行器未来发展趋势之一。近些年,国外一直热衷于倾转旋翼飞机的研究,并且取得不错的成果。虽然国内起步较晚,但也在积极进行倾转旋翼飞机控制理论的探索。
本文所研究的倾转翼飞机与以往的倾转旋翼飞机有所不同。倾转翼飞机把处于旋翼下洗流影响的部分机翼与旋翼一同倾转,进而减小飞机在垂直起降阶段的升力损耗,但是在过渡阶段飞机各部件之间存在复杂的气动干扰,多个参数存在严重耦合,构成一个时变强耦合非线性系统,是过渡段飞行控制的难点所在[3-5]。
国内外学者对倾转翼飞机控制方面进行了深入研究[6-12]。在倾转翼飞机过渡段控制的方法中,最常见的是经典的PID控制。经典的PID结构简单、可调参数少、稳定性好,但对非线性、强耦合、时变系统控制不佳。
为了实现倾转翼飞机飞行平稳过渡的控制要求,本文首先建立飞机动力学模型,然后设计基于数据驱动的无模型自适应控制方法的控制器,使用粒子群优化算法对控制器进行参数寻优,最后在MATLAB中仿真验证飞行控制品质。
1 倾转翼飞机动力学模型
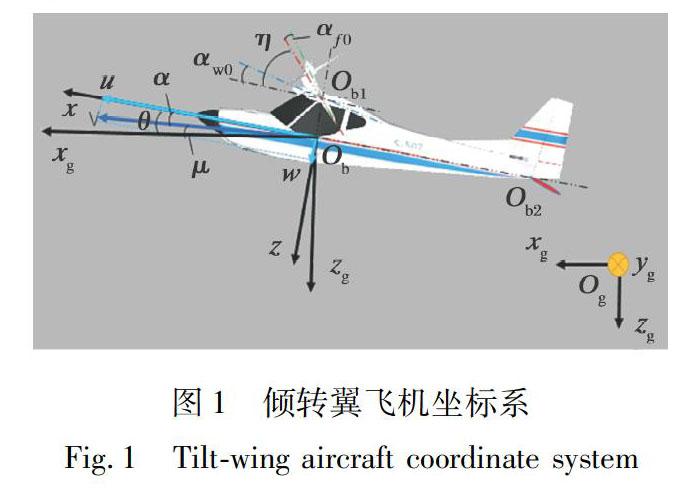
倾转翼飞机坐标系如图1所示。其中:x,y,z是机体坐标系的三轴,xg,yg,zg是地面坐标系的三轴,抬头力矩为正。
把倾转翼飞机分为固定翼、转翼、旋翼、平尾和多功能副翼五个部分,分别建立对应的空气动力学模型,再通过坐标转换把各个部分的受力和力矩转换到机体坐标系下构成整体的飞机纵向模型。各部件气动力模型详见文献[13-14]。倾转翼飞机纵向运动方程为
式中: V为飞机的空速;m为飞机质量;g为重力加速度;h,α,x,q,θ分别代表飞机气动中心的竖直高度、飞机
迎角、水平位移、俯仰角速度以及俯仰角;Iy为倾转翼无人机y轴上的转动惯量;FxQ为飞机x轴上除重力外所受的合力;FzQ为z轴上所受的合力;My为飞机y轴上总力矩。为简化计算过程,暂定襟翼不参加控制。
过渡段模式下(直升机模式到固定翼模式),转翼转角从88°变化到2°,旋翼向前倾转,旋翼拉力在水平方向上的分量增加,飞机快速加速,这时旋翼拉力在垂直方向的分量(升力)减小。在着陆时(固定翼模式到直升机模式),转翼转角从2°变化到88°,旋翼向后倾转,提供阻力,飞机迅速减速,垂直方向分量(升力)增大[15]。根据倾转翼飞机的运动学方程,在MATLAB中可以仿真得到倾转翼飞机的仿真模型。该模型的输入信号有旋翼拉力、倾转翼转角(单位角度)和升降舵舵力;输出信号主要有飞行高度、迎角、空速、俯仰角、俯仰角速度、航迹角、地速和爬升速度。
2 无模型自适应控制器设计及参数寻优
无模型自适应控制算法(Model-free adaptive control,MFAC)是基于数据的控制方法,只需要被控系统提供输入输出实时测得的数据信息,不依赖受控系统数学模型,以及经过算法处理而得到受控对象的信息来设计控制器,是未来控制理论发展方向之一。但是无模型自适应控制方法初始参数较多,而且在调整参数时参数之间相互影响较大,人工调整参数比较困难。
本文引入粒子群优化算法对无模型自适应控制算法进行参数寻优。
2.1 过渡段控制器设计
基础的多输入多输出MFAC控制算法为[16-17]
由式(2)~(3)构成MFAC控制算法。其中:Φ-c(k)为计算得到的伪偏导数;Φ-ij(1)为Φ-ij(k)的初值;a,b1,b2为常数,是为了保证Φ-c(k)为对角占优矩阵,分别取1,1,2;y*(k+1)为受控系统期望输出;u(k)为系统控制输入;y(k)为系统实际输出;权重因子系数λ>0;权重因子μ>0;η∈(0,2],步长因子ρ∈(0,1]。
传统的线性控制方法在控制倾转翼飞机过渡段时,由于转动惯量的改变,非线性气动干扰也会带来幅值摄动,所以不能达到理想的控制效果。现采用MFAC方法结合粒子群优化算法来进行控制。
倾转翼飞机从直升机模式过渡到固定翼模式时,初始状态为 [Vd ;Vp ;q;θ;h ;xg;V;α],期望输入为y*=[h* ;Vd*]; 实际输出为y=[h ;Vd];控制输入为U=[η;T;σe;Fd]。在倾转翼飞机动力学模型中加入控制系统模块,构成倾转翼飞机过渡段MFAC控制结构。
在设计过渡段控制器时,把姿态控制回路分为外环角度回路和内环角速度回路。姿态回路内环将飞行器俯仰角速度作为反馈传递给升降舵,以升降舵舵力作为控制信号输入。姿态回路外环把俯仰角作为反馈信号,通过控制算法解算達到对系统虚拟输入信号的控制。由于倾转翼飞机的姿态回路中角速度通常比角度响应快一个数量级,所以根据时标分离原则,设计双环控制器[18]。
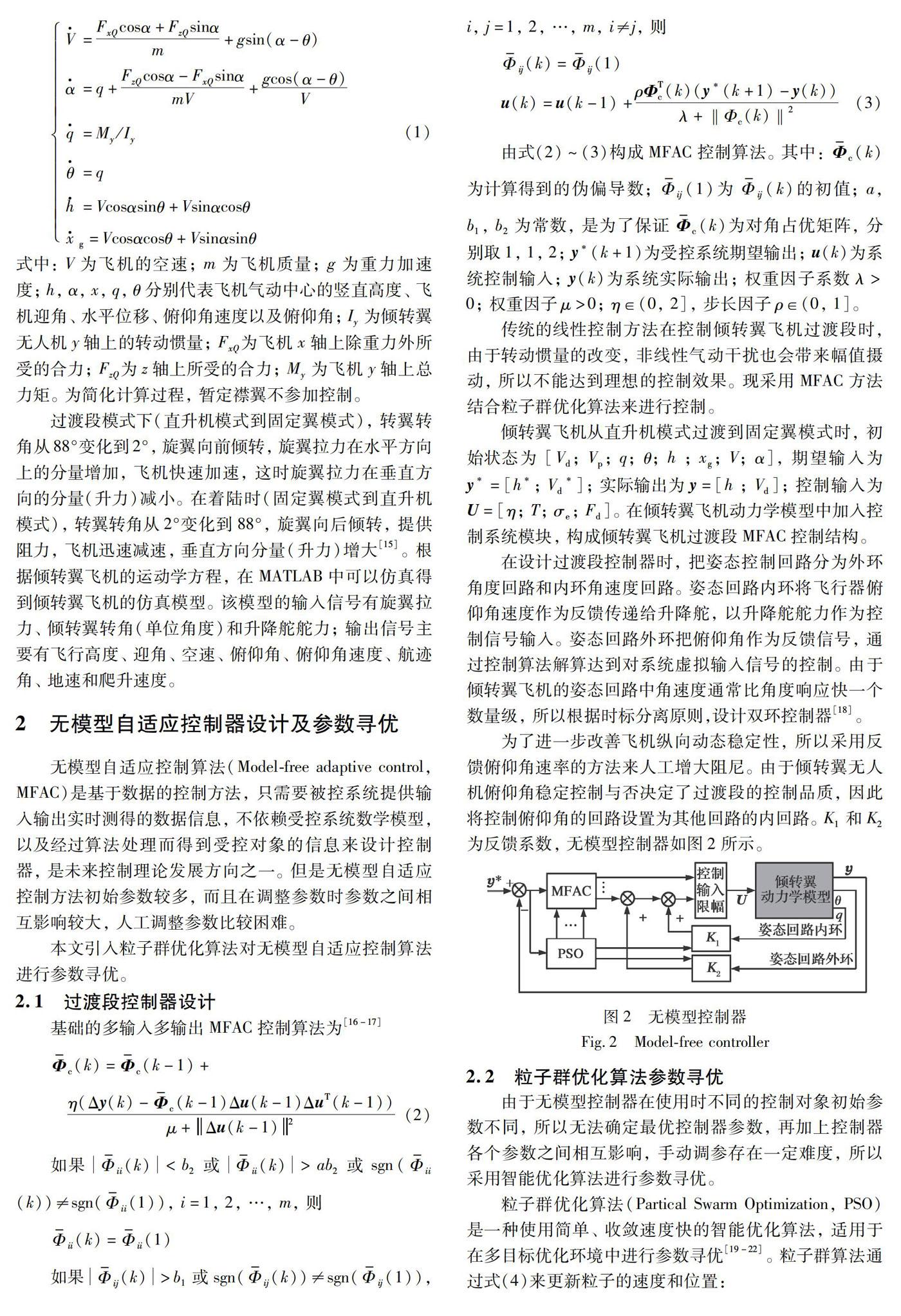
为了进一步改善飞机纵向动态稳定性,所以采用反馈俯仰角速率的方法来人工增大阻尼。由于倾转翼无人机俯仰角稳定控制与否决定了过渡段的控制品质,因此将控制俯仰角的回路设置为其他回路的内回路。K1和K2为反馈系数,无模型控制器如图2所示。
2.2 粒子群优化算法参数寻优
由于无模型控制器在使用时不同的控制对象初始参数不同,所以无法确定最优控制器参数,再加上控制器各个参数之间相互影响,手动调参存在一定难度,所以采用智能优化算法进行参数寻优。
粒子群优化算法(Partical Swarm Optimization,PSO)是一种使用简单、收敛速度快的智能优化算法,适用于在多目标优化环境中进行参数寻优[19-22]。粒子群算法通过式(4)来更新粒子的速度和位置:
式中: c1,c2为加速常数,通常c1=c2=2;r1,r2为加速因子,是[0,1]区间内均匀分布产生的随机数 ;pid和pgd分别为粒子个体历史最优值和群体历史最优值;Vk+1id和Xk+1id分别为粒子下一次迭加更新的速度和位置;Vkid和Xkid为粒子当前速度和位置;D为算法最大迭代次数;T为当前迭代次数;ω为惯性权重;ω1和ω2分别为初始惯性权重和迭代至最大迭代次数的惯性权重,通常ω1=0.9,ω2=0.4;粒子速度Vp∈[Vmin,Vmax]。
粒子群算法通过粒子的适应度函数值来判断粒子是否为最优解,本文采用综合性能指标作为适应度函数。多输入多输出的综合目标函数为
式中: ω1,ω2,ω3,ω4为寻优权值,代表在寻优过程中不同的输出量所占有的比重。本文中ω1,ω2,ω3,ω4取0.999,0.001,100,5。粒子群算法寻优的参数包括MFAC的初始参数λ,μ,η,ρ,Φ(1)以及K1,K2。
3 傾转翼飞机过渡段控制仿真
根据已有的研究结果,要求倾转翼飞机在10 s内匀速倾转由直升机模式转换到固定翼模式,飞机在定高飞行阶段初始参数[u0;w0;q0;θ0;h0] 设置为[2;0;0;0;20],期望输入y*=[h*;Vd*]设置为[20;20],实际输出为y=[h;Vd],控制输入为U=[η;T;F;Fd]。将旋翼拉力限制在0~17/N内,升降舵舵力范围是[-5/N,5/N],转角设置在[2°,88°],襟副翼力设置为0。在倾转翼飞机纵向非线性模型中加入无模型控制器和粒子群综合目标函数模块,构成倾转翼飞机过渡段整体控制图,如图3所示。粒子群优化算法初始参数设定:最大迭代次数D=1 000,种群数量N=50,空间维数M=10,学习因子c1=c2=2,惯性权重ω1=0.9,ω2 =0.4,粒子速度范围Vp∈[-0.5,0.5]。
在MATLAB[23]中编写粒子群算法程序,并保存为.m格式文件。运行系统仿真,调用粒子群算法寻优迭代,最终寻得无模型控制器参数λ=90.000,μ=52.204,η=0.523 156,ρ=1.000,K1=10.554,K2=21.389,Φ(1)=[8.993 20.000;0.306 -0.257]。倾转翼飞机过渡段各状态及系统控制信号运行仿真结果如图4~11所示。
由图4~9分析可知,当系统期望高度和速度在寻优所占比重相同时,寻得的参数更偏向于高度和速度均衡的控制。由过渡段的高度变化曲线和速度变化曲线分析可知,在倾转初始阶段高度的变化量稍微偏大,速度变化比较理想。虽然CFDL-MFAC和粒子群算法的结合能够实现倾转翼飞机过渡段的控制,但是由于倾转过程中高度和速度耦合程度较高,很难实现高度和速度同时最优控制效果,此时缩小了高度控制比重,进而提高了速度的控制效果。
由图10~11可知,在倾转翼无人机模式转换阶段不使用襟副翼,只用旋翼、转翼和升降舵也可实现过渡段的控制,倾转翼转角变化与其一致,旋翼拉力和升降舵舵力变化都在允许的范围内,达到理想的控制效果。
综合来看,初始阶段旋翼拉力较大,飞行高度会有些偏高,转翼转角偏小,旋翼产生的低头力臂不大,此时平尾向上偏转产生向下的正舵力,让飞机有一定的抬头,同时使俯仰角度偏大。经过10 s以后,倾转翼无人机转换到固定翼飞行模式,旋翼拉力较小,但力臂最大,升降舵为负舵力,飞机会有略微的低头。正是由于在设计控制系统时加入的稳定回路才能够保持俯仰角的稳定,确保各项控制参数都在许可范围内,倾转翼无人机也可以以最小的平飞速度保持稳定的飞行状态。若适当放大过渡段转换时间,会得到更好的结果。
参考文献:
[1] 陈刚,贾玉红,马东立,等. 垂直起降固定翼无人机串联混电系统优化设计[J/OL].北京航空航天大学学报,2020.DOI:10. 13700/j. bh. 1001-5965. 2020. 0015.
Chen Gang,Jia Yuhong,Ma Dongli,et al.Optimized Design of Vertical Take-off and Landing Fixed-Wing UAV Series Hybrid Power System[J/OL].Beijing University of Aeronautics and Astronautics,2020.DOI:10. 13700/j. bh.1001-5965. 2020. 0015.(in Chinese)
[2] Pan Z,Chi C Z,Zhang J K. Nonlinear Attitude Control of Tiltrotor Aircraft in Helicopter Mode Based on ADRSM Theory[C]∥Professional Committee of Control Theory of Chinese Automation Society,2018: 1388-1393.
[15] 夏青元,徐锦法,金开保. 倾转旋翼飞行器的建模和操纵分配策略[J]. 航空动力学报,2013,28(9) :2016-2028.
Xia Qingyuan,Xu Jinfa,Jin Kaibao.Tilt-Rotor Aircraft Modeling and Its Manipulation Assignment Strategy[J].Journal of Aerospace Power,2013,28(9):2016-2028.(in Chinese)
[16] 侯忠生. 无模型自适应控制的现状与展望[J]. 控制理论与应用,2006,23(4): 586-592.
Hou Zhongsheng.Current Situation and Prospect of Model-Free Adaptive Control[J]. Control Theory & Applications,2006,23(4): 586-592.(in Chinese)
[17] 侯忠生. 无模型自适应控制[M]. 北京: 科学出版社,2013.
Hou Zhongsheng.Model-Free Adaptive Control[M]. Beijing:Science Press,2013. (in Chinese)
[18] 吴森堂. 飞行控制系统[M].2版. 北京: 北京航空航天大学出版社,2013.
Wu Sentang.Flight Control System[M].2nd ed.Beijing:Beijing University of Aeronautics and Astronautics Press,2013. (in Chinese)
[19] 杨英杰. 粒子群算法及其应用研究[M].北京: 北京理工大学出版社,2017.
Yang Yingjie.Research on Particle Swarm Optimization and Its Application[M].Beijing:Beijing Institute of Technology Press,2017. (in Chinese)
[20] 胡文华,曹仁赢. 改进粒子群优化算法的四旋翼ADRC姿态控制[J]. 电光与控制,2019,26(12): 12-16.
Hu Wenhua,Cao Renying.An Improved PSO Algorithm of Quadrotor ADRC Attitude Control[J].Electro-Optics and Control,2019,26(12):12-16.(in Chinese)
[21] 杨斌.垂直起降无人机基于粒子群优化的分数阶控制[D].南京: 南京邮电大学,2018.
Yang Bin.Fractional Order Control of Vertical Takeoff and Landing UAV Based on Particle Swarm Optimization[D].Nanjing:Nanjing University of Posts and Telecommunications,2018.(in Chinese)
[22] 胡丹丹,張宇辰. 基于改进粒子群算法的四旋翼自抗扰控制器优化设计[J]. 计算机应用研究,2019,36(6): 1762-1766.
Hu Dandan,Zhang Yuchen.Optimization Design of Four-Rotor Auto Disturbance Rejection Controller Based on Improved Particle Swarm Optimization Algorithm[J]. Application Research of Computers,2019,36 (6):1762-1766. (in Chinese)
[23] 史峰,王辉,郁磊,等.MATLAB智能算法30个案例分析[M].北京: 北京航空航天大学出版社,2011.
Shi Feng,Wang Hui,Yu Lei,et al.Analysis of 30 Cases of MATLAB Intelligent Algorithm[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2011. (in Chinese)
A Model-Free Adaptive Control Method
Based on Particle Swarm Optimization
Yang Longfei1,Wang Qi2*,Wang Rong2,Zheng Guangting1,Chen Longsheng2
(1. School of Information Engineering,Nanchang Hangkong University,Nanchang 330063,China;
2. School of Aircraft Engineering,Nanchang Hangkong University,Nanchang 330063,China)
Abstract:According to the characteristics of time-varying,strong coupling and non-linear of the transition section of the tilt-wing aircraft,the model-free adaptive control method based on data-driven is adopted to design a flight controller forthe transition section,and the particle swarm optimization algorithm is used to solve the problem of parameter adjustment of the model-free adaptive controller.The research results show that the model-free adaptive control method based on data-driven can realize the smooth mode conversion of tilt-wing aircraft,and also prove that the model-free adaptive control method based on data-driven has its unique advantages in dealing with time-varying and strong coupling non-linear system.
Key words:tilt-wing;data driven;model-free adaptation;particle swarm optimization; flight control
收稿日期:2020-05-21
作者简介:杨龙飞(1995-),男,安徽阜阳人,硕士,研究方向是飞行器控制设计。
通讯作者:王琦(1963-),男,浙江东阳人,教授,研究方向是控制理论与控制工程等。E-mail:wangqi439@126.com
