无人机/无人艇协同控制研究进展
2020-01-25徐小斌段海滨曾志刚邓亦敏
徐小斌 段海滨 曾志刚 邓亦敏

摘 要:面对未来水上作战环境的立体化、多样化、复杂化,无人机/无人艇在充分利用自身优势的基础上,能够通过协同的形式获得作战效能的最大化,无人机/无人艇协同控制为军事领域和民用领域的水上作业提供了新的技术手段。本文分别对空海跨域协同-机/艇协同概念、国内外无人机/无人艇协同发展现状、无人机/无人艇协同起降技术及无人机/无人艇协同控制的未来发展趋势等方面进行了总结。研究表明,无人机/无人艇空海跨域立体协同控制作为一项颠覆性技术和作战理念,为未来异构无人系统的研究发展指明了方向。
关键词:无人机; 无人艇; 无人系统; 空海跨域; 异构协同; 制导与控制
中图分类号:TJ765; V279
文献标识码:A
文章编号:1673-5048(2020)06-0001-06
0 引 言
无人系统是未来战争的主力军,正朝着分布式、立体化、多域作战的模式发展。无人平台、武器系统及作战运筹的智能化对无人系统技术在未来智能化战争中的应用起着关键作用。智能化协同的无人系统集群作战是未来战争的主要形态,也是当前及未来无人系统技术的研究重点[1]。
无人系统[2-3]作为有人系统的重要补充力量,以更加安全、隐蔽、高效、低廉的方式完成多种高危、复杂、繁琐、重复的任务,成为异构智能体联合作战体系的重要组成成分[4-5]。美国国防部在2018年8月30日公布第五版《2017—2042财年无人系统综合路线图》,旨在进一步将无人系统整合到作战体系,以确保各军种的无人系统发展目标及工作与国防部规划保持一致[6]。2018年12月21日,中国工程院院士、同济大学陈杰教授发表了题为《人工智能发展中的若干科学问题及颠覆性技术》的报告,指出自主智能无人系统将是人工智能的发展方向,亟需各学科交叉融合以及各领域专家的通力合作[7]。据预测,到2025年无人系统在美军、俄军武器装备中的比例将达到30%以上,到2030年美军60%的地面作战平台将实现无人智能化。
随着无人机自主能力和智能化水平不断提高,无人机不仅在任务侦察、目标打击等军事领域被广泛应用,而且在农业植保、遥感测绘、森林消防及影视航拍等民用领域也被大量应用[8-10]。可见,无人化智能装备及武器越来越受到世界各国的关注。如今,世界军事强国又纷纷把目光投向水上无人作战艇[11],作为未来海上战争的新锐武器,无人艇技术得到突飞猛进的发展。同样,无人艇也分为军用和民用两类,军用无人艇主要用于海事安全及感应扫雷等,民用无人艇主要用于海洋环境监测、海洋生物研究、海岸测量测绘、通信中继、领海监视等。无人系统发展过程中都存在各自的优势及其自身难以克服的短板,异构无人系统的协同可以达到取长补短、效能最大化的目的。
无人机/无人艇跨域协同是当今国际的前沿技术,引起了世界各发达国家和经济体的广泛重视,并被列为无人系统发展路线图的战略核心技术。我国将无人系统群体跨域协同列为未来的战略发展方向[12]。无人机/无人艇协同技术及装备对维护我国海洋权益、管控我国水域资源起着至关重要的作用。
1 空海跨域异构协同-机/艇协同概念
无人机作为一种自动化作业工具,具有速度快、视野广等优势。随着无人机的自主能力和智能化水平不断提高,以及无人机面对的复杂跨域协同任务需求的不断增长,决定了未来无人机势必朝着多域化、自主化、智能化、集群化方向发展[13-15]。但是在发展过程中,无人机续航能力短、载荷能力弱的缺陷极大地制约了其作战效能。美国陆军于2020年9月发布的《小型无人机系统(Small Unmanned Aerial System,SUAS)战略》,旨在将现有的无人机和新型无人机整合到未来的无人系统编队中,并能够实现多域作战(Multi Domain Operations,MDO),以提升作战效能。无人艇作为未来水上新锐武器,具有自主航行、智能避障、续航能力长、载荷能力强等优势,在军用和民用领域得到了广泛的应用。
随着工业4.0概念的提出,《中国制造2025》[16]等国家战略接踵而至,正式宣告第四次工业革命开拔。随着对无人系统自动化、數字化、集群化和智能化要求的深化,相比于同构多无人平台,异构多无人平台可以利用不同个体的优势形成更强的多维空间信息感知能力,完成更复杂的工作[17-18]。针对无人机和无人艇自身存在的优势及短板,将无人机/无人艇融合到海空军作战体系和民用领域中,将极大地改变未来海空联合作战态势及跨域复杂任务执行模式。李凌昊等[19]将无人机与水面无人平台协同作战分为3类:无人艇为跨域中心的协同作战、异构平台一体化的协同打击作战和异构平台协同探测隐身目标。
2 国内外无人机/无人艇协同发展现状
在无人机/无人艇控制相关研究中,主要包括协同体系结构、协同系统组成、协同任务分配、协同编队、协同路径规划、协同控制等[18]。其中,无人机/无人艇精准协同起降控制对海面异构平台可靠执行协同任务尤为重要,对保证其全天候任务执行与安全具有重要意义。
作为无人艇的一类重要协作平台,舰艇无人机对于拓展无人艇海上作业有着举足轻重的作用[18]。2011年9月,美国成功进行了无人机着舰试验,由此拉开了无人机自主着舰的序幕。2012年12月,法国在“拉斐特”级护卫舰上进行了舰载无人机自动起降系统的海上试验并取得成功[20]。在无人机着舰的研究过程中,也付出了巨大的代价,美国EA-6B“徘徊者”着舰失败,损失惨重。2016年,俄罗斯“雅克”-141在垂直降落着舰过程中瞬间毁灭。因此,对于无人机着舰的研究需要进一步深化。
相比于大型舰艇,无人艇具有易操纵、成本低、自主性强、灵活性强等优势,在海洋测绘、水上救援、军事侦察、协同打击等方面发挥着巨大的作用。2017年美国海军水面舰艇协会年会公布了空海协同系统概念图,表示美国海军未来将列装单艇携带多架无人机执行作战任务的系统[17],美国海军空海系统概念图如图1所示。
2005年,5级飓风“威尔玛”登陆佛罗里达州罗曼诺角,南佛罗里达大学机器人辅助搜救中心出动iSENYS直升机和一架无人水面艇AEOS-1对距离马可岛14 km的部分地区的破坏情况进行调查,这是已知的第一次使用无人机/无人艇联合平台进行的应急响应,也是第一次体现出无人机/无人艇协同系统的实用价值[21]。
2017年,美国海军实现多旋翼无人机在RobotX竞赛艇上的降落。据美国《国防系统网》报道,美海军开发的“幽灵舰队”概念,是使水面、空中和水下的多个无人系统编队协同作战,在执行广泛的作战任务的同时使海军和海军陆战队人员远离风险。以色列作为无人艇研究的另一支先驱队伍,在“海上骑士”的基础上,将无人机/无人艇协同作战作为海军在无人艇发展方面的新方向。法国舰艇建造局(DCNS)于2017年5月成功实现3种无人系统(无人机、无人艇和无人潜航器)的协同作战,在欧洲范围内尚属首次。
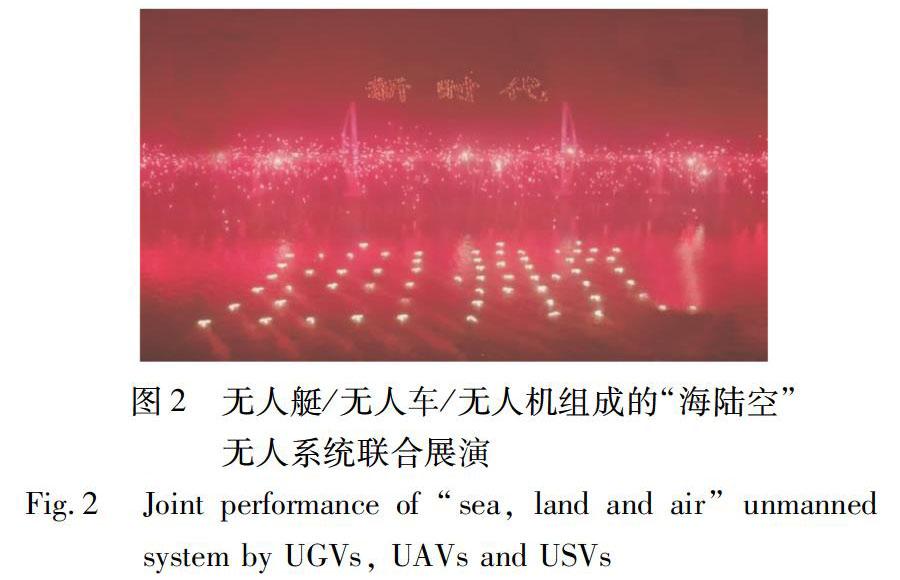
空海跨域协同不仅在军用领域有极大的应用价值,在民用领域也有非常广泛的应用。2018年,由云洲、百度、比亚迪、零度智控和高巨创新等企业联合开发的由无人船(艇)、无人车(Unmanned Ground Vehicle,UGV)、无人机组成的“海陆空”无人系统联合展演,震撼亮相世界上最长的跨海大桥——港珠澳大桥,如图2所示,向全世界展现了中国实力。2020年11月,长江干流开展冬季执法大练兵首次执法巡航,无人机从游艇上起飞并在空中巡查污染源,但此次无人机是与游艇的合作,尚未实现自主。
3 無人机/无人艇协同起降研究现状
当无人机距离陆地太远且剩余电量很低时,无人机必须在水上降落。无人机降落到无人艇上进行能源补充是无人机/无人艇异构协同平台的一项重要任务,也是无人机实现长航时执行任务的基础。无人机/无人艇协同的一个关键步骤是无人机/无人艇精准起降,但机/艇精准起降存在落点动、区域小、干扰多等挑战。
3.1 无人机/无人艇协同平台
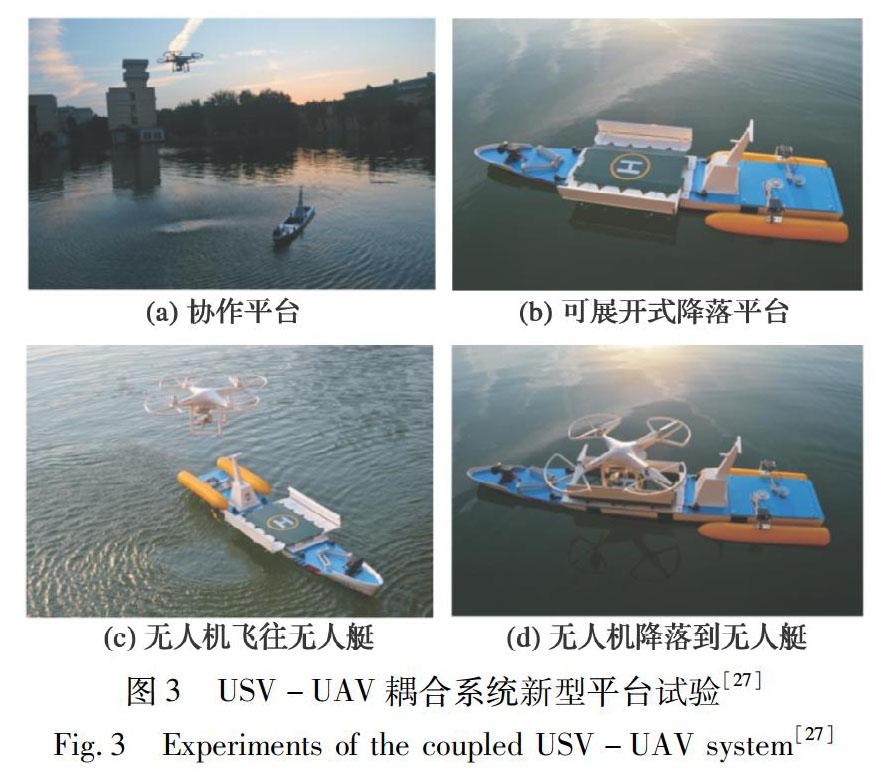
早期的无人机/无人艇协作平台之间的耦合很小。赵良玉等[22]对无人机/无人艇自主降落的若干相关技术进行了总结,主要包括:无人机自主降落到无人艇上的整个工作过程、无人机自主降落的引导技术和无人机自主降落的辅助技术等。Koo等[23]提出了一种基于无人机/无人艇协作平台的水母配送管理系统,无人机用于识别和估计水母的位置,无人艇根据无人机估计出的结果引导无人艇对水母进行驱赶或清除。针对水上无人机/无人艇救援平台的研究,Dufek等[24]利用无人机提供溺水者的实时视频,分别通过两种视觉定位方法来估计无人艇的位置和方向,进而协助无人艇导航。Omar[25]分别建立旋翼无人机和无人艇模型,采用基于PID反馈回路的控制结构,实现不同任务模式下的无人机/无人艇协同控制。由于无人机/无人艇协同作战性能受到通信能力的制约,Ma等[26]提出了一种适用于无人机/无人艇协同的基于AdHoc网络的分布式动态网络拓扑结构通信框架。随着无人机/无人艇之间的联动能力逐渐增强,无人机与无人艇之间的耦合关系逐渐被关注。Shao等[27]设计了一种用于USV-UAV耦合系统的新型协作平台,该平台采用多超声波联合动态定位算法,解决了耦合式无人侦察系统的定位问题,并利用层次化的着陆引导点生成算法,实现无人机降落到无人艇上的有效引导,如图3所示。
3.2 基于视觉的无人机/无人艇自主着艇技术
上海交通大学IPAC团队近年来一直在从事空地协同和空海协同方面的研究,于2018年在国内最早成功实现了基于视觉的旋翼无人机自主水上精准降落。2019年,上海交通大学通过GPS引导和视觉导航在夜幕中实现了无人机自主着艇。同年,华中科技大学团队相继克服了识别慢、对不准、跟不上、干扰大、难着艇等问题,在广东松山湖采用自主研发的HUSTER-68无人艇和无人机,成功完成了基于视觉的机艇协同运动起降。华中科技大学无人机艇协同起降试验如图4所示,标志着无人机/无人艇协同技术再上新台阶。
无人机/无人艇协同起降离不开精准的导航技术。然而,常规的GPS导航方式并不能满足无人机降落到无人艇上的精度要求; 惯性导航等其他导航方式也会存在受传感器的限制及自身导航误差积累而导致的精度降低问题。基于视觉的导航方式具有不依赖传感器且误差不积累等优势,因此常常被应用到精准导航中。Sanchez-Lopez等[28]通过卡尔曼滤波器保证了无人机估计的鲁棒性,进而依靠视觉实现自主着陆。Xu等[29]通过识别合作目标点并进行位姿估计的方式,实现无人机降落到海面移动目标上。随着计算机视觉及深度学习的不断发展与深入,基于深度学习的目标检测与跟踪方式也被广泛应用到无人机降落过程的视觉处理。但是深度学习的方法依赖大量的目标数据库,算法运算量大,很难做到实时数据处理。Xu等[30]提出一种三阶视觉检测方法进行无人机与无人艇之间的相对位姿估计,进而控制无人机降落到无人艇上,最终在湖上进行了验证。Young等[31]提出了USV/UAV辅助测量方法,该方法采用位于无人机上的视觉传感器捕捉高分辨率图像,以及部署在无人艇上的声呐传感器来获取水深读数,从而实现无人机与无人艇的协同。
仿生视觉技术的发展为视觉信息处理提供了新的思路。以鹰为代表的猛禽享有“天空之王”的美誉,具有极高的视觉敏感度[32-33]。鹰能够在高空中发现海面上的鱼,并迅速跟踪锁定目标直至抓捕到鱼,如图5所示。Duan等[34]应用仿鹰眼视觉的对比敏感度机制进行合作目标检测,并利用特征点匹配实现精确的位姿估计,获得了较高的精度。Deng等[35]设计并实现了一种基于仿
鹰眼视觉的目标检测视觉平台,并采用显著性分析的方法估计潜在目标的位置。Wang等[36]通过对鸟类的视觉系统,特别是与视觉注意机制有关的细胞核进行研究,
提出了一种分层视觉注意模型,用于显著性检测。Duan等[37]仿鹰眼视觉导航机制,实现了无人机的自主着陆。此外,为了更好地模拟鹰眼超强的视觉能力,北京航空航天大学的段海滨教授团队[32]研制出了一种仿鹰眼变分辨率视觉成像装置,从实物的角度真正模拟鹰眼视觉。
无人机以其搜索范围广、通信距离远等优势弥补无人艇搜索距离近、通信范围小的缺陷,无人艇以其续航能力强的长处填补无人机续航能力短的短板。因此,无人机/无人艇协同[22]及基于视觉的无人机/无人艇精准起降协同是未来执行战争任务、水上搜救、环境监测等复杂任务的主要手段,也为实现空海跨域异构协同奠定了基础。
4 未来展望
无人作战平台是未来战争中武装侦察、目标探测、阵地防护、武装打击、执行特殊任务、海洋环境保护、海洋生物保护,且实现零伤亡、多重复工作任务的重要手段。无人艇作为海上作战的新锐武器,会在未来的战争中协同无人机、无人潜航器和无人车等,共同构筑一个完整的无人化战场[17]。
各国正在竞相发展多功能异构无人系统,无人机/无人艇异构协同是无人系统智能化、立体化的新生力量。无人机/无人艇空海跨域异构立体协同构想如图6所示。垂直起降无人机既具备多旋翼无人机悬停的优势,又具备固定翼无人机能够高速航行的优点,且两种模式可以根据任务需求进行切换。在保证通信正常的前提下,垂直起降无人机与水面无人艇的协同可以在有限的任务时间内,收到更高的效益。
无人机/无人艇协同作为水面武器装备无人化发展的重要分支,将在未来军事打击、侦察巡逻、远海作战、海上救援、地理测绘、环境监测等军用和民用领域发挥重要的作用,但要真正实现无人机/无人艇的协同控制还需要解决以下关键问题。
(1) 智能感知。对于任务环境的智能感知是使无人机/无人艇协作效能最大化的前提基础。精确感知任务环境中的合作信息或威胁因素,使得无人机或无人艇在利用自身优势的同时,还能增强自身的存活率。模仿生物的视角实现目标的识别、跟踪是计算机视觉长期以来发展的方向和目标,仿鹰眼视觉恰恰能为无人机/无人艇对外界复杂环境的智能感知提供好的解决方案[38]。
(2) 环境自适应。环境自适应是无人系统在面临复杂任务环境时的一个挑战性问题。在复杂多变的环境中准确识别擅长伪装的目标,对无人机/无人艇来说都是一个难关。随着计算机视觉、深度学习及仿生视觉技术的发展,使无人机/无人艇具备环境自适应及学习战场环境的能力是机/艇在空海跨域协同任务中致胜的关键。
(3) 提升无人机/无人艇的自我生存能力。无人机/无人艇在执行任务过程中难免会因为故障而损失。据统计,无人系统被击落摧毁的案例也不在少数。因此,发展隐身技术是无人机/无人艇长时间执行协同任务的一个重点方向。
(4) 提升电磁网络的安全性。无人机/无人艇协同过程中高度依赖通信网络,而二者之间进行信息交互的通信网络存在被敌人或其他电磁设备干扰的风险。因此,提升电磁网络的安全性是无人机/无人艇数据信息实时共享与交互的必要保障。
(5) 功能向攻击性作战平台演变。随着人工智能、大数据的发展,无人机和无人艇单体功能的不断增加与完善,无人系统的自主性也越来越强,二者将融合为一个整体,在战场上发挥更大的优势。无人机/无人艇的协同也不再局限于编队、巡逻、测绘等单一的任务模式,而是可以拓展到具有攻击性且更复杂的作战任务中,转变成具有精确打击能力的无人武器装备,这对于敌方航空母舰等大型海上作业装备构成了极大威胁。
5 结 论
我国拥有广袤的海洋国土,以及众多的河流湖泊。空海跨域无人系统装备的革新是“海上丝绸之路”战略落实的必经之路。随着无人化、智能化技术的不断进步,同构个体到同构集群、同构个体到异构个体、同构集群到异构集群是在未来复杂任务环境中无人系统协同发展的一个必然发展趋势。无人机/无人艇跨域任务模式将不断拓展,其军事价值受到世界各主要军事强国的高度肯定和重视。无人机/无人艇协同控制在空海跨域异构协同有着不可替代的地位。同时,无人机/无人艇精准起降协同是无人机/无人艇能够实现优势互补的关键步骤[39]。未来,我国应加大投入研制轻型水面无人作战艇与无人机等其他无人系统的协同,使我国水面武器装备建设体系更加完善。伴随着水面无人系统的智能感知、信息融合、自主决策、动态防撞、精准起降等关键技术的不断突破,必将推动我国空海跨域武器装备无人系统发展到一个新台阶。
参考文献:
[1] 李风雷,卢昊,宋闯,等. 智能化战争与无人系统技术的发展[J]. 无人系统技术,2018,1(2): 14-23.
Li Fenglei,Lu Hao,Song Chuang,et al. Development of Intelligent Warfare and Unmanned System Technology[J]. Unmanned Systems Technology,2018,1(2): 14-23.(in Chinese)
[2] Gomes J,Urbano P,Christensen A L. Evolution of Swarm Robotics Systems with Novelty Search[J]. Swarm Intelligence,2013,7(2/3): 115-144.
[3] 王雅琳,楊依然,王彤,等. 2019年无人系统领域发展综述[J]. 无人系统技术,2019,2(6): 53-57.
Wang Yalin,Yang Yiran,Wang Tong,et al. Summary of the Development of Unmanned Systems in 2019[J]. Unmanned Systems Technology,2019,2(6): 53-57.(in Chinese)
[4] 韩光松,侯博,李萍.无人自主系统在海战场的运用[J/OL].飞航导弹,2020. DOI: 10.16338/j.issn.1009-1319.20200081.
Han Guangsong,Hou Bo,Li Ping. Application of Unmanned Autonomous System in Sea Battlefield[J/OL]. Aerodynamic Missile Journal,2020. DOI: 10.16338/j.issn.1009-1319.20200081. (in Chinese)
[5] 国务院.关于印发新一代人工智能发展规划的通知[EB/OL].(2017-07-20)[2020-10-06].http:∥www.gov.cn/zhengce/ content/2017-07/20/content_5211996.htm.
The State Council of the Peoples Republic of China. Notice on Printing and Distributing the Development Plan of New Generation Artificial Intelligence[EB/OL].(2017-07-20)[2020-10-06]. http:∥ www.gov.cn/zhengce/content/2017-07/20/content_5211996.htm. (in Chinese)
[6] 李磊,王彤,蒋琪. 从美军2042年无人系统路线图看无人系统关键技术发展动向[J]. 无人系统技术,2018,1(4): 79-84.
Li Lei,Wang Tong,Jiang Qi. Key Technology Develop Trends of Unmanned Systems Viewed from Unmanned Systems Integrated Roadmap 2017—2042[J]. Unmanned Systems Technology,2018,1(4): 79-84.(in Chinese)
[7] 中国国际无人机应用技术展览会组委会.2018年第七届中国国際无人机应用技术展览会[EB/OL].(2018-12-21)[2020-10-06].http:∥www.ciuavexpo.com/newsshow.asp?id=13974&big=20.
CIUAV EXPO. The 7th China International UAV Application Technology Exhibition in 2018 [EB/OL]. (2018-12-21)[2020-10-06]. http:∥www.ciuavexpo.com/newsshow.asp?id=13974&big=20. (in Chinese)
[8] 段海滨,申燕凯,赵彦杰,等. 2019年无人机热点回眸[J]. 科技导报,2020,38(1): 170-187.
Duan Haibin,Shen Yankai,Zhao Yanjie,et al. Review of Technological Hotspots of Unmanned Aerial Vehicle in 2019[J]. Science & Technology Review,2020,38(1): 170-187.(in Chinese)
[9] 段海滨,张岱峰,范彦铭,等. 从狼群智能到无人机集群协同决策[J]. 中国科学(信息科学),2019,49(1): 112-118.
Duan Haibin,Zhang Daifeng,Fan Yanming,et al. From Wolf Pack Intelligence to UAV Swarm Cooperative Decision-Making[J]. Scientia Sinica Informationis,2019,49(1): 112-118.(in Chinese)
[10] Duan H B,Yang Q,Deng Y M,et al. Unmanned Aerial Systems Coordinate Target Allocation Based on Wolf Behaviors[J]. Science China Information Sciences,2018,62(1): 1-3.
[11] 李佳佳,刘峰,马维良.国内外海洋无人系统智能装备产业发展现状[J].船舶工程,2020 (2):25-31.
Li Jiajia,Liu Feng,Ma Weiliang. Development Status of Marine Unmanned System Intelligent Equipment Industry at Home and Abroad[J]. Ship Engineering,2020 (2): 25-31. (in Chinese)
[12] 周思全,化永朝,董希旺,等. 面向空地协同作战的无人机-无人车异构时变编队跟踪控制[J]. 航空兵器,2019,26(4): 54-59.
Zhou Siquan,Hua Yongzhao,Dong Xiwang,et al. Air-Ground Time Varying Formation Tracking Control for Heterogeneous UAV-UGV Swarm System[J]. Aero Weaponry,2019,26(4): 54-59.(in Chinese)
[13] 国内外无人机发展现状分析[EB/OL].(2017-11-06)[2020-10-06].http:∥www.chinabgao.com/k/wurenji/29886.html.
Analysis of UAV Development at Home and Abroad [EB/OL].(2017-11-06)[2020-10-06]. http:∥www.chinabgao.com/k/ wurenji/29886.html. (in Chinese)
[14] 赵煦. 走向智能自主的无人机控制技术[J]. 科技导报,2017,35(7): 1.
Zhao Xu. UAV Control Technology Towards Intelligent and Auto-nomous [J]. Science & Technology Review,2017,35(7): 1.(in Chinese)
[15] 张邦楚,廖剑,匡宇,等.美国无人机集群作战的研究现状与发展趋势[J/OL].航空兵器,2020.DOI:10.12321/ISSN.1679-5048.2020.0082.
Zhang Bangchu,Liao Jian,Kuang Yu,et al. Research Status and Development Trend of United States UAV Swarm Battlefield[J/OL]. Aero Weaponry,2020. DOI:10.12321/ISSN.1679-5048.2020. 0082. (in Chinese)
[16] 国务院.关于印发《中国制造2025》的通知[EB/OL].(2015-05-19)[2020-10-06].http:∥www.gov.cn/zhengce/content/2015-05/ 19/content_9784.htm.
The State Council of the Peoples Republic of China. Notice on Printing and Distributing “Made in China 2025”[EB/OL].(2015-05-19)[2020-10-06]. http:∥www.gov.cn/zhengce/content/2015-05/19/content_9784.htm. (in Chinese)
[17] 张卫东,刘笑成,韩鹏. 水上无人系统研究进展及其面临的挑战[J]. 自动化学报,2020,46(5): 847-857.
Zhang Weidong,Liu Xiaocheng,Han Peng. Progress and Challenges of Overwater Unmanned Systems[J]. Acta Automatica Sinica,2020,46(5): 847-857.(in Chinese)
[18] 陈士涛,张海林. 基于作战网络模型的异构无人机集群作战能力评估[J]. 军事运筹与系统工程,2019,33(1): 38-43.
Chen Shitao,Zhang Hailin. Combat Capability Evaluation of He-terogeneous UAV Cluster Based on Combat Network Model [J]. Military Operations Research and Systems Engineering,2019,33(1): 38-43.(in Chinese)
[19] 李凌昊,张晓晨,王浩,等. 海上异构无人装备一体化协同作战架构[J]. 舰船科学技术,2019,41(12): 50-53.
Li Linghao,Zhang Xiaochen,Wang Hao,et al. Research on Cooperative Operational Architecture of Integrated Heterogeneous Unmanned Marine Equipment[J]. Ship Science and Technology,2019,41(12): 50-53.(in Chinese)
[20] Consolini L,Morbidi F,Prattichizzo D,et al. Leader-Follower Formation Control of Nonholonomic Mobile Robots with Input Constraints[J]. Automatica,2008,44(5): 1343-1349.
[21] Murphy R R,Steimle E,Griffin C,et al. Cooperative Use of Unmanned Sea Surface and Micro Aerial Vehicles at Hurricane Wilma[J]. Journal of Field Robotics,2008,25(3): 164-180.
[22] 赵良玉,程喆坤,高鳳杰,等. 无人机/艇协同自主降落的若干关键技术[J].中国造船,2020,61(S1):156-163.
Zhao Liangyu,Cheng Zhekun,Gao Fengjie,et al. Several Key Technologies of Unmanned Aerial Vehicle-Unmanned Surface Vehicle Cooperative Autonomous Landing[J]. Shipbuilding of China,2020,61(S1): 156-163. (in Chinese)
[23] Koo J,Jung S,Myung H. A Jellyfish Distribution Management System Using an Unmanned Aerial Vehicle and Unmanned Surface Vehicles[C]∥ 2017 IEEE Underwater Technology (UT),2017:1-5.
[24] Dufek J,Murphy R. Visual Pose Estimation of USV from UAV to Assist Drowning Victims Recovery[C]∥ 2016 IEEE International Symposium on Safety,Security,and Rescue Robotics (SSRR),2016.
[25] Omar V A. Modelling and Control of a UAV-USV Collaboration Scheme for Fluvial Operations[D]. Spain:Universidad Carlos III de Madrid,2017.
[26] Ma Y,Zhao Y J,Qi X,et al. Cooperative Communication Framework Design for the Unmanned Aerial Vehicles-Unmanned Surface Vehicles Formation[J]. Advances in Mechanical Engineering,2018,10(5): 168781401877366.
[27] Shao G M,Ma Y,Malekian R,et al. A Novel Cooperative Platform Design for Coupled USV-UAV Systems[J]. IEEE Transactions on Industrial Informatics,2019,15(9): 4913-4922.
[28] Sanchez-Lopez J L,Pestana J,Saripalli S,et al. An Approach Toward Visual Autonomous Ship Board Landing of a VTOL UAV[J]. Journal of Intelligent Robotic Systems,2014,74(1): 113-127.
[29] Xu X B,Wang Z,Deng Y M. A Software Platform for Vision-Based UAV Autonomous Landing Guidance Based on Markers Estimation[J]. Science China Technological Sciences,2019,62(10): 1825-1836.
[30] Xu Z C,Hu B B,Liu B,et al. Vision-Based Autonomous Landing of Unmanned Aerial Vehicle on a Motional Unmanned Surface Vessel[C]∥39th Chinese Control Conference (CCC),2020.
[31] Young S,Peschel J,Penny G,et al. Robot-Assisted Measurement for Hydrologic Understanding in Data Sparse Regions[J]. Water,2017,9(7): 494.
[32] 赵国治,段海滨. 仿鹰眼视觉技术研究进展[J]. 中国科学(技术科学),2017,47(5): 514-523.
Zhao Guozhi,Duan Haibin. Progresses in Biological Eagle-Eye Vision Technology[J]. Scientia Sinica Technologica,2017,47(5): 514-523.(in Chinese)
[33] 李晗,段海濱,李淑宇. 猛禽视觉研究新进展[J]. 科技导报,2018,36(17): 52-67.
Li Han,Duan Haibin,Li Shuyu. New Progress of the Visual System in Birds of Prey[J]. Science & Technology Review,2018,36(17): 52-67.(in Chinese)
[34] Duan H B,Xin L,Chen S J. Robust Cooperative Target Detection for a Vision-Based UAVs Autonomous Aerial Refueling Platform via the Contrast Sensitivity Mechanism of Eagles Eye[J]. IEEE Aerospace and Electronic Systems Magazine,2019,34(3): 18-30.
[35] Deng Y M,Duan H B. Biological Eagle-Eye-Based Visual Platform for Target Detection[J]. IEEE Transactions on Aerospace and Electronic Systems,2018,54(6): 3125-3136.
[36] Wang X H,Duan H B. Hierarchical Visual Attention Model for Saliency Detection Inspired by Avian Visual Pathways[J]. IEEE/CAA Journal of Automatica Sinica,2019(2):540-552.
[37] Duan H B,Xin L,Xu Y,et al. Eagle-Vision-Inspired Visual Measurement Algorithm for UAVS Autonomous Landing[J]. International Journal of Robotics and Automation,2020,35(2): 94-100.
[38] 段海滨,邓亦敏,王晓华.仿鹰眼视觉及应用[M]. 北京: 科学出版社,2020.
Duan Haibin,Deng Yimin,Wang Xiaohua. Biological Eagle-Eye Vision and Its Application[M]. Beijing: Science Press,2020. (in Chinese)
[39] García-Pulido J A,Pajares G,Dormido S,et al. Recognition of a Landing Platform for Unmanned Aerial Vehicles by Using Computer Vision-Based Techniques[J]. Expert Systems with Applications,2017,76: 152-165.
Progresses in UAV/USV Cooperative Control
Xu Xiaobin1,Duan Haibin1*,Zeng Zhigang2,Deng Yimin1
(1. Beihang University,Beijing 100083,China; 2. Huazhong University of Science and Technology,Wuhan 430074,China)
Abstract:
Facing to the three-dimensional,diversified and complex marine combat environment in the future,unmanned aerial vehicle (UAV) and unmanned surface vehicle (USV) make full use of their own advantages to maximize the effectiveness of cooperative operations. UAV/USV collaborative control provides a new technology for maritime operations in military and civil fields. The concept of air-sea multi domain cooperation- UAV/USV cooperation,the development status of UAV/USV cooperation,the technology of UAV/USV cooperation take-off and landing and the future development trend of UAV/USV cooperative control technology are summarized in this review. The research shows that the multi-domain air-sea three-dimensional cooperation of UAV/USV,which is regarded as a subversive technology and operational concept,points out the deve-lopment direction for the future research of heterogeneous unmanned systems.
Key words: UAV; USV; unmanned system; air-sea multi-domain; heterogeneous collaboration; gui-dance and control
收稿日期:2020-11-10
基金項目:国家自然科学基金项目(U1913602; U19B2033; 61803011)
作者简介:徐小斌(1990-),女,山东威海人,博士,研究方向是仿生智能信息处理。
通讯作者: 段海滨(1976-),男,山东广饶人,博士,教授,研究方向是无人机自主控制。E-mail: hbduan@buaa.edu.cn
