射波刀治疗中追踪肿瘤边界缩放对肺追踪定位参数的影响
2020-01-19高行新
赵 瑞,林 虎,李 莎,高行新,周 敏
(联勤保障部队第940医院放疗科,兰州 730050)
0 引言
射波刀(Cyberknife)是一种新型全身肿瘤立体定向放射外科治疗设备[1]。射波刀影像追踪定位技术是通过影像系统实时X射线影像与放疗计划系统重建产生的数字重建放射影像(digital reconstruction radiography,DRR)的对比来计算患者的体位误差[2-4],从而实现射波刀机械臂对患者体位的自动纠正。射波刀肺追踪技术适用于瘤体大于2 cm、肺周区域肿瘤的放疗,其经过呼吸建模与实时影像追踪定位共同实现射波刀机械臂对运动肿瘤的精准治疗[5-8]。基于放疗医师对肿瘤影像理解、临床因素考虑的差异,放疗计划制订时,即使同一患者同一部位肿瘤,不同医师勾画的肿瘤靶区(gross tumor volume,GTV)也不尽相同,由GTV外放形成的肿瘤计划靶区(planning target volume,PTV)大小亦不相同[9-10]。肺追踪放疗计划制订时,为实现运动肿瘤的实时追踪,系统要求选择追踪肿瘤(tracking tumor),以实现运动肿瘤的位移监视和校准。追踪肿瘤到底应如何选择,射波刀放疗计划手册未能指明,国内外文献亦未见或鲜有报道。我院物理人员一般以GTV作为追踪肿瘤,特殊情况下使用肿瘤PTV作为追踪肿瘤。射波刀临床操作实践中发现,追踪肿瘤选择不同,其肺追踪定位参数结果有所不同,导致肺追踪成功定位难易程度亦有所不同。本文借助肺追踪专用测试模体,对模拟肿瘤GTV边界缩放形成不同大小的追踪肿瘤,观察模拟肿瘤肺追踪定位相关参数的变化,以期为射波刀肺追踪计划的制订提供指导依据。
1 材料与方法
1.1 实验器材
德国西门子SOMATOM Definition AS 64排128层CT模拟定位机;美国Accuray公司G4射波刀,放疗计划系统MultePlan4.0,放疗计划执行系统Cyber-Knife9.0;美国CIRS公司LTT Dynamic Phantom模体(附直径为25 mm的模拟肿瘤标准球体),该模体专配于射波刀治疗系统用于肺追踪治疗物理测试。
1.2 CT扫描模体
安装LTT Dynamic Phantom模体,放入模拟肿瘤,常规模体摆位。扫描条件:120 kV、340 mA,螺距1.0,层厚 0.6 mm。
1.3 制订模体放疗计划
导入CT图像,为方便追踪肿瘤感兴趣容积(volume of interest,VOI)及放疗计划的创建、使用和识别,依次创建和命名 GTV、PTV-1~PTV-5、PTV1~PTV5共11个轮廓。利用球体识别工具识别模拟肿瘤实际边界,形成追踪肿瘤VOI,保存VOI为GTV;追踪肿瘤选择为GTV,常规给定处方剂量,常规制订肺追踪放疗计划,存储并传输为PTV0放疗计划。同样,利用球体识别工具识别模拟肿瘤实际边界,使用测量工具以1mm间距将模拟肿瘤边界(即GTV轮廓)依次内收及外放至5 mm,并将其VOI依次保存为 PTV-1~PTV-5、PTV1~PTV5 轮廓,同时依次将追踪肿瘤选择为 PTV-1~PTV-5、PTV1~PTV5 轮廓,保持原有脊柱及肺追踪定位中心不变,仅使用低分辨率计算靶区剂量(剂量计算时间短),分别并依次制订、存储和传输 PTV-1~PTV-5、PTV1~PTV5 共 10 个放疗计划。
1.4 肺追踪影像定位
于射波刀机房对LTT Dynamic phantom模体进行摆位。打开模体放疗计划PTV0,使用射波刀影像定位系统默认X射线曝光条件(120 kV、100 mA、100 ms)对模体进行X射线影像采集,射波刀影像定位系统自动计算并显示模体摆位误差,调整、预置脊柱追踪定位平移和旋转误差至可接受区域范围;点击“Go to Xsight Lung”进入肺追踪模式,以默认射波刀影像定位系统X射线曝光条件对模拟肿瘤进行X射线影像定位;打开射波刀位移追踪系统(motion tracking system,MTS)计算机,打开 Synchrony User Interface窗口;采用射波刀肺追踪自动呼吸建模方式对模体进行呼吸检测及建立呼吸模型(射波刀肺追踪定位系统能够根据模体呼吸及模拟肿瘤影像定位情况自动设置X射线曝光次数与时间间隔),记录自动呼吸建模期间每次曝光后的dxAB(追踪肿瘤成像中心在实时影像A、B上下平移方向距离差)、Conference A(实时影像A追踪肿瘤的可信度)、Conference B(实时影像B追踪肿瘤的可信度)、Coverage(呼吸模型对模拟肿瘤运动范围的覆盖程度)的数值。Conference A、Conference B、Coverage、dxAB数值通过影像日志读取,Coverage通过MTS的Synchrony User Interface窗口读取;呼吸模型建立完成后,点击“Go to Xsight Spine”,返回至脊柱追踪预置窗口,退出PTV0放疗计划。同样,依次打开PTV-1~PTV-5、PTV1~PTV5放疗计划,对模体进行脊柱追踪定位(因模体位置保持不变,不再调整脊柱追踪定位平移和旋转误差),同样采用射波刀肺追踪自动呼吸建模方式对模体进行呼吸检测及建立呼吸模型,分别记录各放疗计划的 dxAB、Conference A、Conference B、Coverage值,直至各放疗计划肺追踪影像定位完成。
1.5 数据处理
肺追踪定位参数dxAB用毫米(mm)表示,Conference A、Conference B、Coverage用百分比(%)表示。因自动呼吸建模时模体X射线曝光次数不同,PTV0、PTV-1~PTV-5、PTV1~PTV5 放疗计划的 dxAB、Conference A、Conference B、Coverage值均取平均值;为直观显示肺追踪影像定位肿瘤的可信度,各放疗计划的Conference A、Conference B值取平均值后再做平均处理,各放疗计划的Conference A、Conference B平均值记作Conference;为比较模拟肿瘤边界总体内收和总体外放肺追踪定位参数变化情况,对PTV-1~PTV-5(内收)和 PTV1~PTV5(外放)放疗计划的dxAB、Conference、Coverage平均值分别再做平均处理,将其定义为肺追踪肿瘤边界内收与外放dxAB、Conference、Coverage总平均值。
2 结果
2.1 模体预置误差
PTV0放疗计划模体预置定位误差:RIGHT 0.1 mm、SUP 0.0 mm、POS 0.0 mm、Roll R 0.1°、HEAD D 0.0°、CW 1.5°。PTV-1~PTV-5、PTV1~PTV5 放疗计划模体预置定位误差与PTV0放疗计划相比基本不变,平移误差不超过0.2 mm,旋转误差不超过0.1°。
2.2 模拟肿瘤边界未缩放时肺追踪定位参数
肺追踪定位参数dxAB、Conference值分别为0.39 mm、100%,优于其默认阈值范围(dxAB为0.5~5 mm,Conference为 40.0%~99.0%);Coverage值为76.14%,位于呼吸建模次优水平(≥40.0%)。
2.3 肺追踪模拟肿瘤边界内收与外放定位参数的变化
肺追踪模拟肿瘤边界内收与外放定位参数的变化情况如图1所示。参数dxAB值随着模拟肿瘤边界顺序缩放呈不规则波动性增大,其中模拟肿瘤边界内收时更为明显;当模拟肿瘤边界分别内收与外放到5 mm时其差值最大,分别为0.55、0.25 mm。参数Conference值在整个肺追踪定位过程中始终保持不变(100%)。参数Coverage值随着模拟肿瘤边界缩放波动平稳,平均值为70%,最大波动幅度不超过9%。
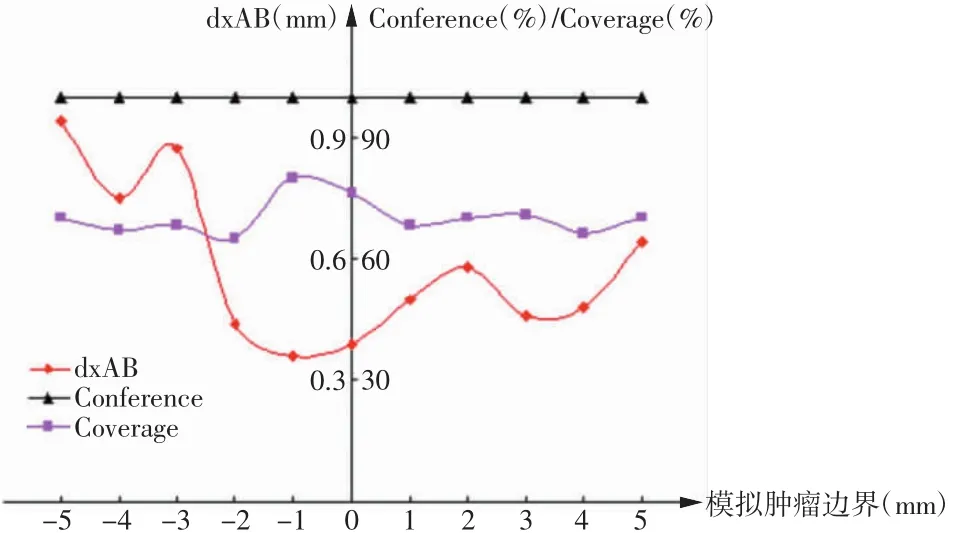
图1 模拟肿瘤边界顺序缩放时dxAB、Conference、Coverage变化情况
2.4 肺追踪模拟肿瘤边界总体内收与总体外放定位参数的变化
模拟肿瘤边界总体内收时dxAB、Conference、Coverage总平均值分别为0.67 mm、100%、70%,与模拟肿瘤边界未内收时相比,dxAB数值增大0.28 mm,Coverage值减少6.14%;模拟肿瘤边界总体外放时dxAB、Conference、Coverage总平均值分别为0.53 mm、100%、69%,与模拟肿瘤边界未外放时相比,dxAB数值增大0.14 mm,Coverage值减少7.14%。无论肺追踪模拟肿瘤边界内收与外放,肺追踪影像定位结果均变差。
3 讨论
dxAB值反映了追踪肿瘤影像定位中心辨识的统一性,并间接反映了影像追踪系统对影像定位中心辨识的准确性,其值越大定位精度越低。Conference值反映了影像配准期间追踪肿瘤位移后匹配窗口的一致性,其值越大表示患者呼吸幅度覆盖程度越高。建立呼吸模式时,Coverage值能否快速达到可治疗阈值,与射波刀影像追踪系统对追踪肿瘤影像的准确识别、患者呼吸是否规律和稳定有关。从临床操作实际经验看,除去患者不自主咳嗽等意外因素打破呼吸模型的稳定,dxAB超阈值变化是干扰肺追踪治疗正常执行的主要原因,dxAB间断或连续超阈值会造成患者治疗中断、呼吸建模时曝光次数增多,导致患者治疗时间被迫延长。因此,为使肺追踪治疗能够顺利进行,放疗技师不得不提高dxAB阈值,在一定程度降低了射波刀影像定位精度,但加大了肺追踪治疗的风险。
射波刀放疗计划系统提供VOI复制、粘贴功能,可通过数值变动缩放VOI边界,但因肿瘤CT值并不均匀,VOI边界缩放后不成比例,与原有形状相比变形明显。为保证模拟肿瘤边界缩放不变形,在制订PTV-1~PTV-5、PTV1~PTV5 放疗计划时,需采用球体识别工具重新对模拟肿瘤实际边界进行识别,然后再利用测量工具均匀、等比例缩放模拟肿瘤边界。由于模拟肿瘤实际边界识别无法做到绝对相同,造成其模拟肿瘤边界缩放时亦存在微小差别,但总体上能够保证模拟肿瘤边界内收和外放的趋势变化。
PTV-1~PTV-5、PTV1~PTV5 放疗计划是在PTV0放疗计划基础上制订的,脊柱追踪定位中心保持默认不变,曝光条件相同,但在定位过程中各放疗计划仍然出现了微弱的模体预置定位误差,其与射波刀靶区定位系统(target locating system,TLS)自动曝光控制差异有关。由于实验中LTT Dynamic Phantom模体相对于治疗床位置始终保持不变,其不会对后期dxAB、Conference、Coverage值测定产生影响。
相对于真人来说,虽然LTT Dynamic Phantom模体所模拟肺肿瘤呼吸运动更加规则、稳定,但由于射波刀靶区定位系统仍然存在自动曝光控制差异,并且X射线曝光时模体肿瘤运动位置不同,造成模拟肿瘤X射线影像存在差异,这也是实验中dxAB、Conference、Coverage数值容易产生波动的重要原因。dxAB、Conference、Coverage平均与总平均值的引入有助于消除dxAB、Conference、Coverage数值波动带来的影响,方便实验结果特点和规律的总结。
从实验结果可以看出,追踪肿瘤GTV边界缩放可引起肺追踪影像定位精度下降,其中以模拟肿瘤边界内收下降尤为明显,当边界内收至5 mm时dxAB值已增大至PTV0放疗计划的2.4倍。基于dxAB值在肺追踪治疗中的重要作用和意义,建议射波刀肺追踪放疗计划制订时,追踪肿瘤边界应尽量接近肿瘤实体边界,即以追踪肿瘤GTV轮廓作为肺追踪肿瘤边界标准。
在实验中dxAB、Conference值结果明显优于实际肿瘤患者的定位结果,尤其Coverage值基本不受追踪肿瘤边界缩放的影响,其与LTT Dynamic Phantom模体中模拟肿瘤自身因素及其规则运动有关[11],如模拟肿瘤密度均匀、边界规则、运动规律无变形。但现实中患者肿瘤密度往往不均、形状不规则、运动形式多样且存在形变,不可能具备模拟肿瘤这样的理想条件,无法达到如实验结果所示优良的dxAB、Conference值。因呼吸建模中模拟肿瘤首次曝光Coverage值必定为0%,且dxAB、Conference值在射波刀允许治疗范围内变化对Coverage值不会产生任何影响,并且随X射线曝光次数的增加由低到高呈台阶式增长,直至达到某一较高值时不再变化,导致实验中Coverage平均值仅能位于呼吸建模次优水平。
2018年5—8月,我院6例肿瘤患者出现肺追踪定位治疗困难和不成功问题,其主要表现为dxAB值不稳定或者超范围无法追踪。通过观察射波刀执行界面DRR影像窗口发现,其多存在追踪肿瘤边界与肿瘤实体边界偏差较大或间有交叉问题。经射波刀放疗计划重新修正追踪肿瘤边界,其中4例患者肺追踪定位和治疗得以顺利实现,1例患者在肺追踪治疗过程中仍然存在dxAB参数不稳定问题,1例患者肺追踪定位最终无法实现。分析认为dxAB参数不稳定患者的呼吸不稳定,无法自主进行呼吸控制,而肺追踪无法执行患者则因CT扫描比较粗糙,模拟定位不规范所致。上述病例初步说明,以追踪肿瘤GTV轮廓作为肺追踪肿瘤边界标准可有效解决多数临床实践中部分肺追踪定位困难及不成功问题。此外,肺追踪定位治疗是否成功或顺利,还会受到模拟定位是否规范、患者呼吸是否规律、放射治疗师经验水平等多重因素影响。
另外,肺追踪影像定位追踪肿瘤仅为计算和衡量实际肿瘤位置变化,追踪肿瘤大小改变不会影响肿瘤GTV或PTV放疗剂量的原有分布。当追踪肿瘤因炎症等原因被正常组织包绕和分界不清时,建议改变追踪肿瘤X射线曝光条件以提高肿瘤组织对炎性或正常组织的辨识度,或者将肿瘤周围炎性组织包含在追踪肿瘤之内,或有助于实现射波刀肺追踪的顺利定位和治疗。