移动背包扫描关键技术及工程应用
2020-01-14李勇胡玉祥张洪德王智孟庆年
李勇,胡玉祥,张洪德,王智,孟庆年
(1.青岛市勘察测绘研究院,山东 青岛 266032; 2.青岛市西海岸基础地理信息中心有限公司,山东 青岛 266000)
1 引 言
伴随着三维激光扫描技术的发展,利用扫描仪快速获取三维空间信息,真实还原被测物体的三维实景,成为近几年迅速发展的热门话题。激光扫描仪本身具有很高的测量效率、较高的测量精度、动态反映物体实景等优点,为科学准确地建立数学模型提供了一种全新的技术手段。基于三维扫描技术整合全景影像采集、融合技术,形成了新的测绘手段-移动扫描测量技术,该技术克服了传统测绘的局限性,可以在短时间内获取精度高、数据量大的三维空间信息,且可以连续反映被测物体的空间特征,提高了测量的效率和精度,成为国内外研究的热点[1]。
目前大比例尺地形图测绘方法主要是应用全站仪或者RTK等手段采集关键地物、地貌特征点,然后在CAD等专业成图软件中绘制数字线划图。这种传统测量方法费时、费力,而且外业采集受通视、定向、转站以及GPS信号等因素的影响,对精度会产生极大的影响。针对上述缺点,本文结合徕卡最新研制的Pegasus:Backpack移动扫描背包,探索移动扫描技术在大比例地形图测绘中的应用,对Pegasus:Backpack外业作业流程以及内业数据处理进行了论述,研究了移动测量过程中的姿态定位、影像拼接、图形编辑、特征点线提取以及建模等关键技术;同时对点云提取特征点、线等精度进行了验证,结果表明通过移动背包扫描手段完全可以满足大比例尺地形图绘制的要求。
2 移动背包扫描系统
2.1 系统简介
徕卡Pegasus:Backpack移动扫描背包,其系统主要包括激光扫描仪、光线传感器、全景影像采集系统、惯性导航系统、控制系统、全球GNSS定位系统、电源供应系统以及远程平板控制系统等。系统构成示意图如图1所示。

图1 Pegasus:Backpack移动扫描背包系统构成
2.2 工作原理
移动背包扫描能够快速获得物体的三维点云数据,以真实形态展示被测物体的空间特征,该系统的工作原理为:三维激光扫描仪的主要构造是一台高速精确的激光测距仪,配上一组可以引导激光并以均匀角速度扫描的反射棱镜。三维扫描系统一般使用仪器自定义的坐标系统:坐标原点位于扫描仪中心,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴垂直于横向扫描面组成左手坐标系,如图2所示。

图2 扫描坐标系
激光测距仪主动发射激光,同时接受由自然物表面反射的信号测算出原点0距激光扫描点的距离S;激光扫描系统通过内置伺服驱动马达系统精确控制多面反射棱镜的转动,使脉冲激光束沿横轴方向和纵轴方向快速扫描,测得每个脉冲激光的横向扫描角度α和纵向扫描角度θ同时通过GNSS系统可以解算得到扫描仪中心的三维坐标值(XS,YS,ZS),即图中原点0的坐标。由此,可计算出扫描激光点在被测物体上的三维坐标为[2]:
(1)
2.3 技术优势
Pegasus:Backpack移动测量系统配置相机和激光扫描仪,集成高精度的GNSS+IMU惯导系统并支持SLAM算法,如图3所示,轻便坚固,一次经过即可同时获取现场照片和彩色点云数据。此移动扫描系统支持室外、室外+室内以及纯室内三种工作模式,独有的SLAM算法使得其室内定位模式定位精度高、受环境影响较小。

图3 Pegasus:Backpack定位原理
SLAM(Simultaneous Location and Mapping)技术是一种在测量环境的同时获取在该环境中位置信息的方法。SLAM实现了在无GPS信号的环境下进行测量,将它与移动测量相结合实现了各种复杂环境下地理信息数据的获取。
3 作业流程
移动背包扫描作业流程主要涉及外业扫描以及内业数据处理两部分。外业扫描主要涉及作业准备、路线规划、设备参数控制以及数据采集几部分;内业数据处理主要涉及数据准备、坐标转换、轨迹解算、影像拼接、点云切割、数据建模以及地形图绘制等环节。如图4所示。
3.1 外业扫描

图4 作业流程

图5 外业数据采集流程
(1)作业准备
采用室外或者室外+室内定位模式需要用到GNSS定位模块,这就需要背包上的GNSS系统与基准站形成同步差分数据,以便后续的解算处理。基准站可以采用假设GNSS基站的模式或者利用周边已有的CORS站,基准站或者CORS站提前设置好数据采样率 1 Hz;架设基准站或者附近的CORS站最好能够距离测区在 20 km以内,如果测区复杂或者区域较大可以增设基准站数量。
(2)路线规划
在外业作业之前最好能进行现场踏勘,根据作业区实际情况确定作业时间和作业路径。路线规划主要考虑测区人、车流量的影响以及GNSS初始化信号遮挡等,为了提高作业效率,合理规划线路避免重复路线也非常重要。如果测区范围较大或者较为复杂,可以考虑划片、划区域作业方式。
(3)数据采集
外业数据采集过程主要包括设备安装、设备初始化、参数设置以及连续采集等过程。如图5所示,首先,将移动背包放置于空旷场地(10 m×4 m左右,开放天空),静态观测5分钟,再动态初始化约5分钟;动态初始化包括直线加速、8字绕行以及静止,以校准IMU。然后,按照提前规划的线路,根据实际情况,尽量选择GNSS信号好的区域,尽量避开大型车辆和人群、避免地物遮挡,在GNSS信号弱或者室内环境中,移动背包可以使用SLAM算法辅助完成定位定向。Pegasus:Backpack移动测量系统配备Pegasus MDA采集系统,可以远程、流程化控制,可以实时查看照片、GNSS信号状态、电池电量、存储空间、亮度调节等,实时监控系统状态,界面如图6所示。

图6 Pegasus MDA采集系统界面
3.2 数据处理

图7 数据处理流程
数据处理流程如图7所示。
(1)数据准备
导出原始GNSS数据后利用ConvertToRINEX将移动站和基准站的数据转换为轨迹计算软件IE支持的GPB格式文件。
(2)坐标转换
如果外业扫描过程中未使用绝对坐标系,三维激光扫描仪扫描的点云仅是点与点之间的相对位置关系,这就需要坐标转换。坐标转换通过公共点(公共标靶)来计算转换参数,转换过程通常利用布尔莎7参数模型,即:
(2)
式中,3个平移参数[△X△Y△Z]T,3个旋转参数[εXεYεZ]T和1个尺度参数m,无单位。
(3)轨迹解算
采用配套的全球顶级专业的GNSS/IMU解算软件,此轨迹解算软件可以显示详细的精度分析报告,可以导出HTML图形报表;可以导出卫星信号、基准站数据、惯导状态等精度评估报告;作业过程的POS信息数据可以以TXT文本格式导出,实现与其他点云设备的数据融合,如图8所示。

图8 轨迹解算
(4)AutoP全自动数据处理
AutoP数据处理软件可以实现全自动处理,只需设置处理控制参数,便可以实现智能化、流程化的SLAM解算功能,一键生成所有的数据(比如全景照片+彩色点云+LAS),如图9所示。
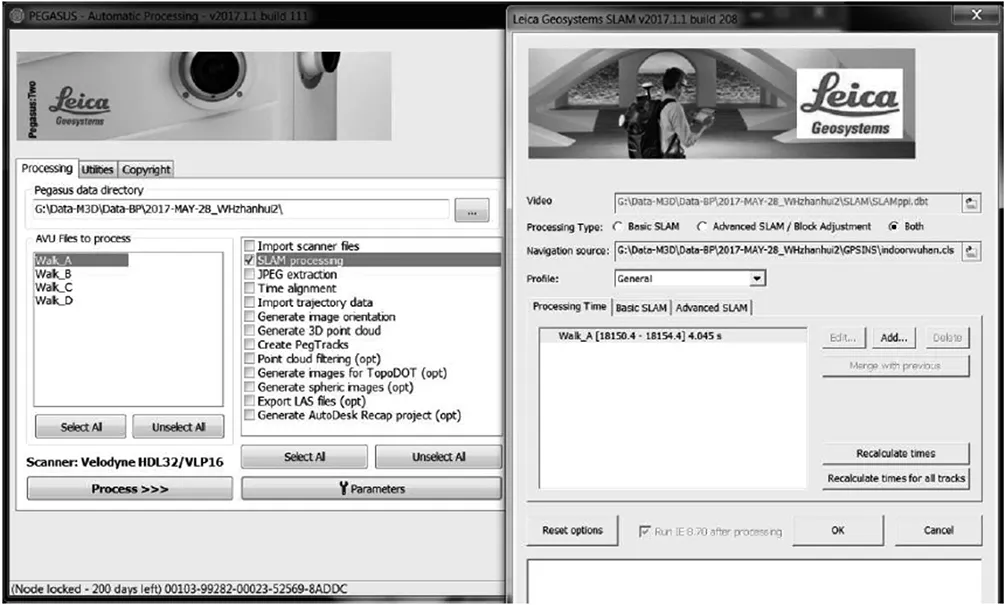
图9 AutoP数据处理
(5)地形图绘制
MapFactory特征提取插件可以实现点云数据与照片同步显示,实现街景式全景浏览,半自动提取路灯、电杆、树木、广告牌等常用地物、地貌,从而轻松绘制各种比例尺地形图,如图10所示。

图10 特征提取
4 工程应用与分析
中德生态园位于胶州湾西岸,青岛经济技术开发区北部,北侧邻近环湾高速。按照开拓创新、生态优先、产业对接、集约建设、合作共赢的原则,建设成了国际一流水平的生态智能区和生态文明示范区。本文利用青岛市勘察测绘研究院新购置的徕卡Pegasus:Backpack移动背包激光扫描仪,结合与仪器配套的三维点云数据处理软件IE、AutoP及MapFactory插件,探索徕卡Pegasus:Backpack移动背包扫描仪在大比例尺地形图测绘中的应用,并进行下述两方面的精度验证:
(1)选取中德生态园内均匀分布的明显地物点、特征点150个,通过全站仪或者RTK采集特征点的平面坐标和高程数据,与点云提取的对应点平面和高程数据进行对比分析,统计较差最大值、最小值、均值以及中误差,如表1所示;
(2)选取中德生态园内明显的房屋角点或明显特征点共60处,通过全站仪或者测距仪量取两点间的间距,与点云上量取的对应点间距进行对比分析,统计两者较差的最大值、最小值、均值以及中误差,如表2所示。

坐标结果对比 表1

距离结果对比 表2
由表1、表2可以看出,利用徕卡Pegasus:Backpack移动背包激光扫描仪获取点云数据与实测数据平面较差最大值 11.9 cm,最小值 0.6 cm,中误差 4.1 cm;高程较差最大值 12.4 cm,最小值 -0.1 cm,中误差 4.3 cm;距离较差最大值 15.9 cm,最小值 -0.4 cm,中误差 5.6 cm。能够满足《城市测量规范》(CJJ/T8-2011)要求,P40完全可以满足建筑物立面测量精度要求。
5 结 论
本文探索将徕卡Pegasus:Backpack移动背包扫描仪应用于大比例尺地形图测绘中,对Pegasus:Backpack激光扫描仪工作原理以及技术优势进行了阐述,结合专业的点云后处理软件IE、AutoP、Infinity,重点探讨了移动测量过程中的坐标转换、姿态定位、影像拼接、图形编辑、特征点线提取以及建模等关键技术。通过实际项目验证,在室外或者室外+室内测量环境下,利用Pegasus:Backpack完全可以满足城市大比例尺地形图测绘的要求;相比传统测量手段,三维激光扫描技术有其独特的优势,同时点云数据可以供其他方面应用,为以后更进一步的发掘提供了基础数据,具有很好的实用意义。
根据外业实际作业过程发现,GNSS信号对测量数据质量和精度有重要的影响,特别是在GNSS信号失锁或者无信号的情况下,SLAM算法会随着时间的增长出现发散的现象,如何有效控制SLAM发散以及与其他传感器数据有效融合,成为三维激光扫描技术需要进一步解决的问题。
