长短时记忆网络水下目标噪声智能识别方法
2020-01-14张少康田德艳张小川
张少康,王 超,田德艳,张小川
(1.海军潜艇学院,山东 青岛 266000;2.海洋科学与技术国家实验室,山东 青岛 266000)
0 引 言
特征向量提取方法一直以来都是水下目标辐射噪声识别问题的研究重点。文献[1 - 4]就舰船螺旋桨空化噪声调制线谱特征提取方法及建模进行了相关研究,文献[5 - 8]就舰船辐射噪声的低频线谱特征的提取进行了研究,文献[9 - 11]开展了舰船辐射噪声功率谱相关分析研究,文献[12 - 14]则就舰船辐射噪声的时域及非线性特征提取方法进行了研究。但是,传统水声目标特征提取方法大都需要通过人工分析手段提取时频谱特征或其他类型的特征,目标识别过程具有较强的人机交互特性,需要研究人员具备较强的数据分析能力、先验知识及专业素养。
近几年,随着浮标潜标、水下滑翔机、AUV、UUV 等水下无人潜航器的发展,基于水下无人平台的声学探测体系正在不断建立完善,未来水下无人平台水声目标探测系统要求平台自身具备目标探测、跟踪及自动识别能力,传统水下目标识别方法已无法满足此需求,因此,智能识别方法将成为今后水下目标识别领域的研究重点之一。目前,已有学者开展了相关方面的研究工作。文献[15] 针对水声目标小样本识别问题,提出了基于混合正则化深度置信网络的水声目标深度特征学习及识别方法;文献[16]通过建立SDAE 堆栈式自编码模型,对水下目标辐射噪声谱数据进行逐层降维特征提取;文献[17]使用卷积神经网络(CNN)与深度置信网络(DBN),对3 类水下目标进行了识别;文献[18] 采用听觉感知和卷积神经网络模拟人类听觉系统的听音判型过程对舰船辐射噪声进行分类识别,通过一个5 层卷积神经网络对舰船目标信号的二维听觉图谱进行了特征提取。
在众多深度学习网络模型中,循环神经网络(RNN)[19]是专门用于处理时序序列的神经网络,其变体模型长短时记忆网络(Long Short-Term Memory,LSTM)[20-21]由于有效弥补了RNN 梯度消失和梯度爆炸、长期记忆不足等问题,使得循环神经网络能够真正有效应用于长时时序问题。目前,LSTM 模型已成功应用于语音识别[22]、故障时间预测[23]等领域。然而,在水声探测领域其应用相当有限,特别是对于水下目标识别问题,目前还未发现相关研究。
本文针对水下目标辐射噪声智能化识别这一问题,提出一种基于LSTM 长短时记忆网络的识别方法,给出了详细网络结构设计方案,并针对实际应用中存在的有偏估计、数据分布不平衡等问题提供了一定的解决方案。在此基础上,分别以水下目标辐射噪声时域时间序列数据、频谱数据、MFCC 特征数据为网络输入向量,进行深层次特征提取和分类识别研究,并采用实际水声信号对该方法进行验证,证明了将LSTM长短时记忆网络应用于水下目标识别的有效性。
1 LSTM 长短时记忆网络识别模型
1.1 LSTM 长短时记忆网络模型
长短时记忆网络(Long Short Term Memory Networks,LSTM)是循环神经网络(RNN)的改进形式,其基本单元被称为记忆块,由一个中心节点和3 个门控单元组成。中心节点通常被称为记忆细胞,用以存储当前网络状态,3 个门控单元分别通常被称作输入门、输出门和遗忘门,用以控制记忆块内信息流动。在前向传播过程中,输入门用以控制输入到记忆细胞的信息流,输出门用以控制记忆细胞到网络其他结构单元的信息流;在反向传播过程中,输入门用以控制迭代误差流出记忆细胞,输出门用以控制迭代误差流入记忆细胞。而遗忘门则用以控制记忆细胞内部的循环状态,决定信息的取舍或遗忘。通过这种门控机制,LSTM 网络得以控制单元内信息流动,使其具备保存长时间信息的能力,即“记忆”能力,在训练过程中能够防止内部梯度受外部干扰,避免了梯度弥散和梯度爆炸问题。
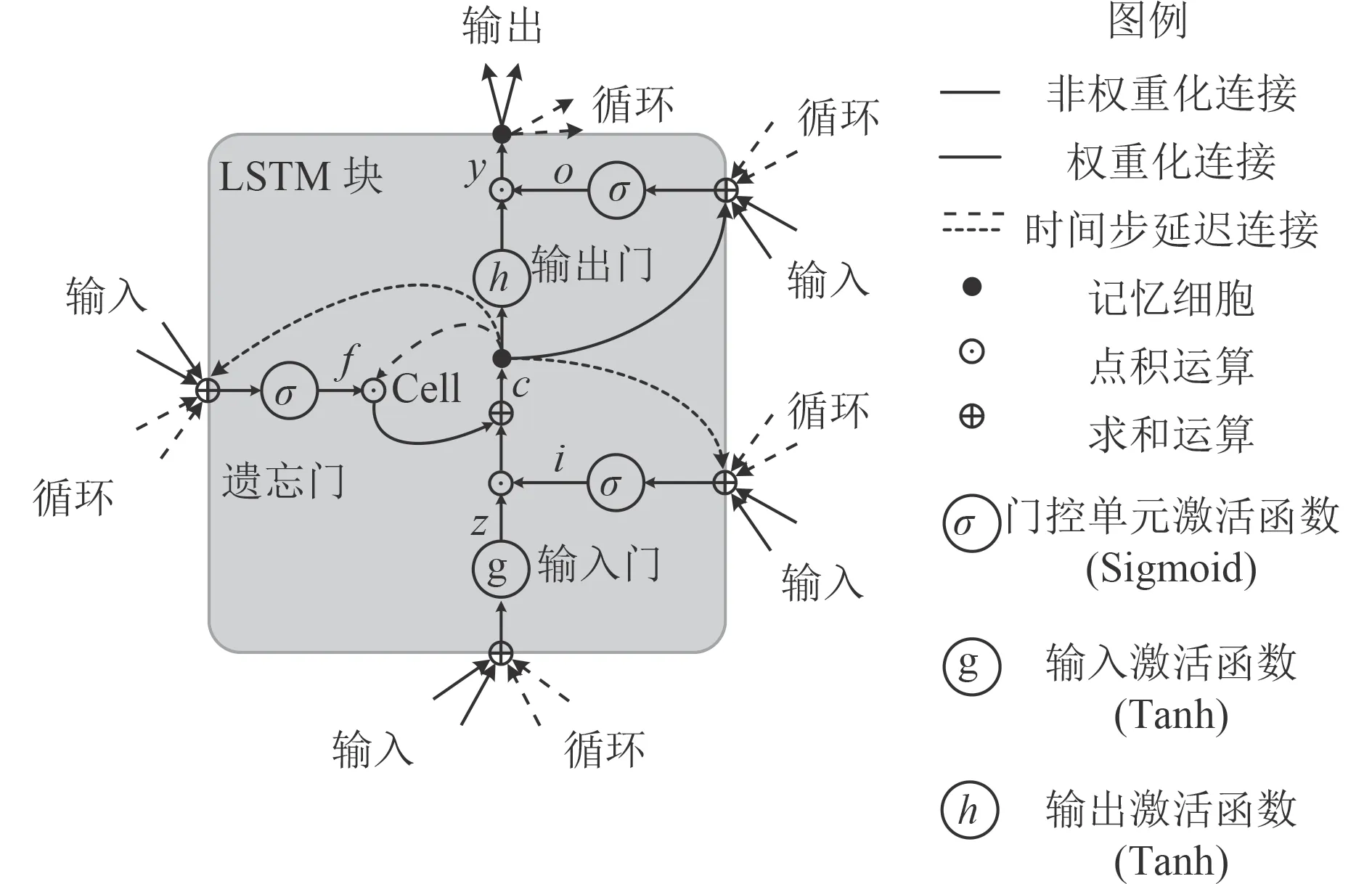
图 1 LSTM 基本结构单元[24]Fig.1 Basic structure unit of LSTM
设单个LSTM 记忆块的输入向量为 xt,输出向量为 yt,前向传播公式可表述为[25]:
1)长期记忆单元Ct更新过程
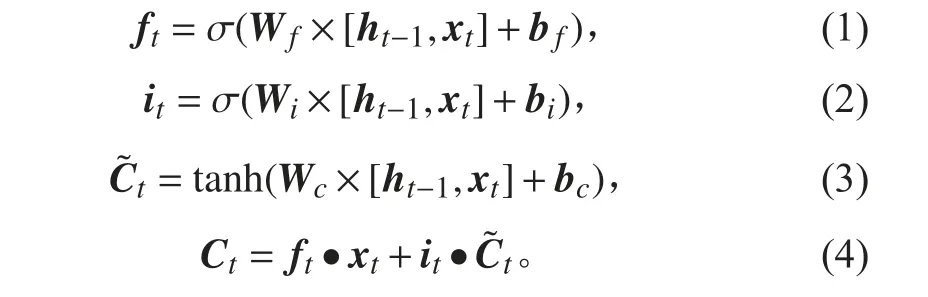
其中: ft代表遗忘门; it代表输入门。在每一个时刻,遗忘门会控制上一时刻记忆的遗忘程度,而输入门则控制新记忆写入长期记忆的程度。 ft, it,都是与上一时刻的短期记忆 ht-1和 当前时刻输入 xt相关的函数,其中, σ是sigmoid 函数,取值范围[0, 1],tanh 函数取值范围[-1, 1]。
2)短期记忆单元 ht更新过程

其中, ot表示输出门,控制着短期记忆如何受长期记忆影响。
单个LSTM 细胞的输出 Ct, ht循环作为层内细胞的输入输出,即第t-1 时刻细胞单元输出 Ct-1, ht-1为下一时刻LSTM 细胞的输入值,此为层内循环。层内各时刻LSTM 细胞共用相同权重参数 Wlstm及偏置系数blstm,因此,单层LSTM 网络可看做单个LSTM 细胞输入输出值的循环计算。此外,细胞单元输出 ht还作为下一层LSTM 网络对应细胞单元的输入 xt参与到该层循环计算中,此为层间循环。LSTM 网络采用BPTT 算法[26]进行训练,其主要步骤为:1)按式(1)~式(6)前向计算LSTM 网络输出值;2)反向计算每个LSTM 细胞单元误差项;3)根据误差项,计算相应权重参数梯度;4)通过相关优化算法更新权重;5)重新按步骤1 进行前向计算,依此循环。
在深度学习模型优化方面,目前已有众多成熟算法,如基本的随机梯度下降(SGD)、动量、Nesterov 动量算法及自适应学习率算法,如AdaGrad,RMSProp,Adam 等算法,本文使用优化算法为Adam 算法。在模型正则化策略方面,选取目前最为流行的dropout 算法[27],以提高模型的泛化能力。相关研究表明,dropout 算法能够有效抑制模型的过拟合现象,提高模型的鲁棒性。
1.2 LSTM 识别模型
结合LSTM 网络模型相关理论及水下目标辐射噪声数据特点,本节给出基于LSTM 的水下目标辐射噪声识别方法,相关识别框图如图2 所示。按网络结构,可将该模型分为输入层、LSTM 特征学习层、特征分类层3 部分;按功能,可将该模型分为数据预处理、模型训练与识别分类3 个模块。
输入层主要进行数据预处理工作,包括对目标噪声信号进行分析、获取时域、频谱或其他类型数据信息,模型输入数据标准化操作,以及输入层到LSTM层数据非线性变换等工作。设归一化后输入数据向量为 Xin={x1,x2,······,xm},LSTM 层每层块循环次数为T,则将输入 Xin按T 进行分割,后按时序顺序经非线性变换,输出作为LSTM 层输入向量 Xlstm。整个过程按公式可描述为:
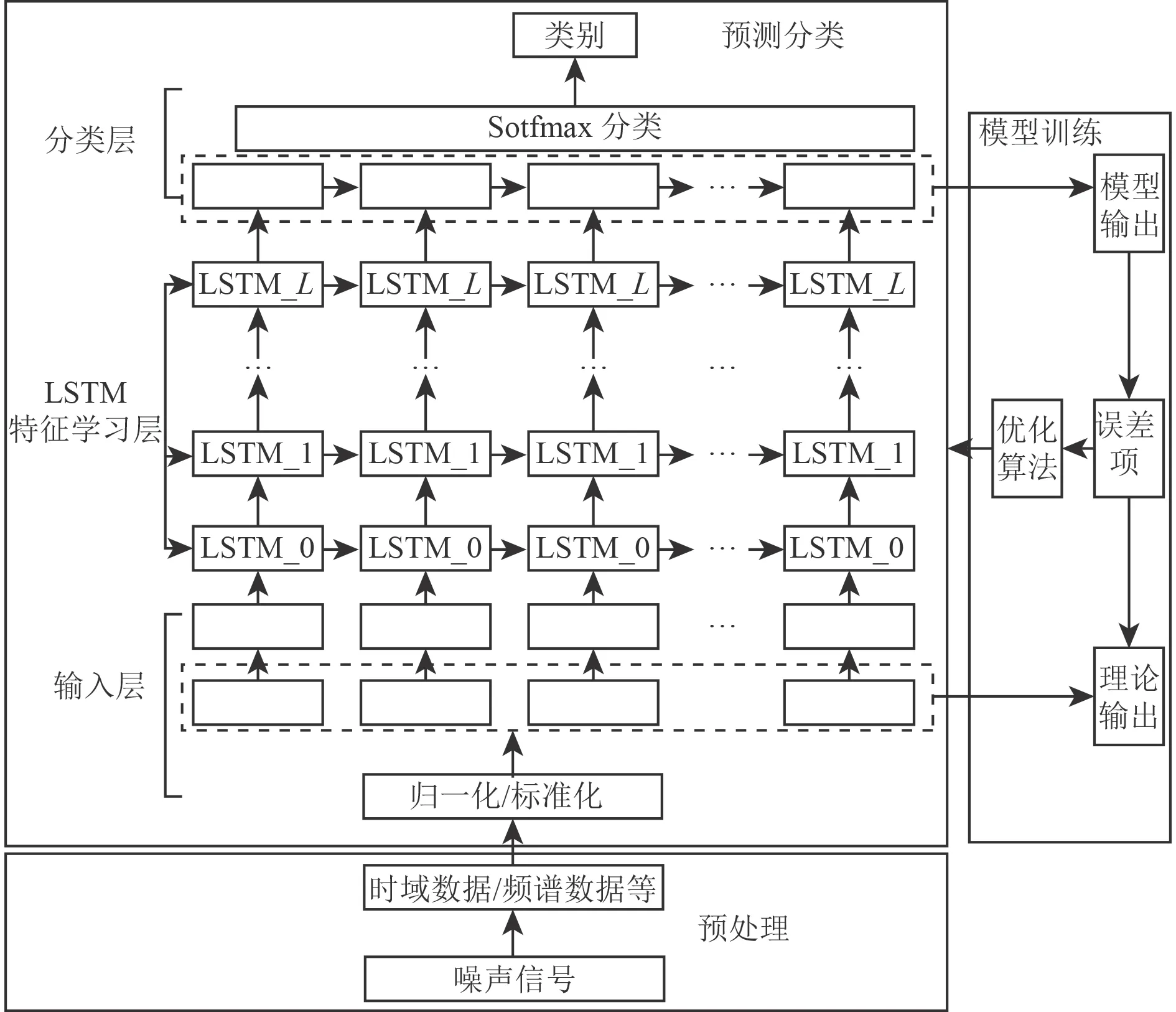
图 2 LSTM 识别框图Fig.2 Recognition diagram of LSTM
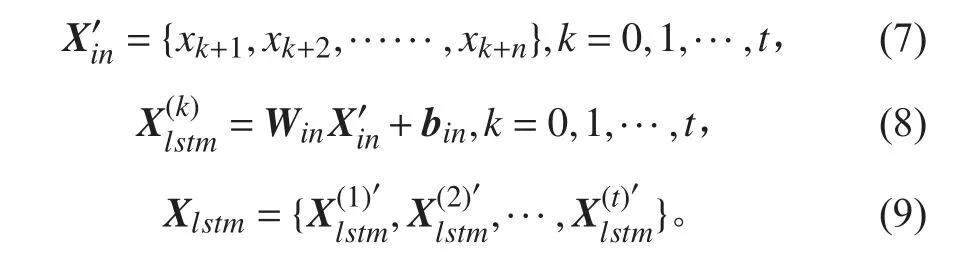
其中,Win, bin为 输入层权重参数和偏置系数, n= m/T,为正整数。
LSTM 层主要对输入数据进行非线性特征提取,深度学习模型具有从大量数据中自主学习特征的能力,LSTM 层输出即为网络模型自主学习到的特征数据。 Xlstm作为该层输入向量,按照式(1)~式(6)逐层进行前向计算,由最后一层各LSTM 块输出 ht共同组成LSTM 层输出向量 Xout,即

分类层或输出层主要以softmax 分类器构成,以LSTM 层输出向量作为分类器输入,通过计算信号所属各类别概率给出识别结果。
2 模型验证
对于未来基于水下无人平台的声学探测设备,主要对水下目标进行警戒探测,因此判定本文所提出模型有效性的标准就是能否正确区分水面、水下两类目标,基于此判定标准,进行如下验证:
模型训练数据库包含各种已知类别的舰船辐射噪声数据近1 600 条,按1s 时长进行处理,分别获取噪声信号的时域时间序列数据、频谱数据及MFCC 梅尔倒谱特征数据作为LSTM 识别模型的样本库数据,其中样本总数为65 284,其中水面目标样本数42 375,水下目标样本数22 909,3 种输入数据条件下LSTM网络参数如表1 所示。
同时,为保证验证结果有效性,按照4/5 比例从样本库中随机抽取数据组成多组训练样本,剩余1/5 作为测试样本,各组测试结果如表2 所示。
第1 组条件下LSTM 智能识别模型对时域数据、频谱数据及MFCC 数据训练效果如图3 所示。
以上几组测试数据表明,在以时域时间序列数据、频域频谱数据和MFCC 特征数据作为输入向量的情况下,采用LSTM 模型对水下目标噪声进行识别分类是可行的。另外,在上述4 组训练模型条件下,输入向量为时域数据时,对水面目标分类正确率大于80%,对水下目标分类正确率大于71%;输入向量为频谱数据时,对水面目标分类正确率大于80%,对水下目标分类正确率大于71%;输入向量为MFCC 数据时,对水面目标分类正确率大于84%,对水下目标分类正确率大于74%。
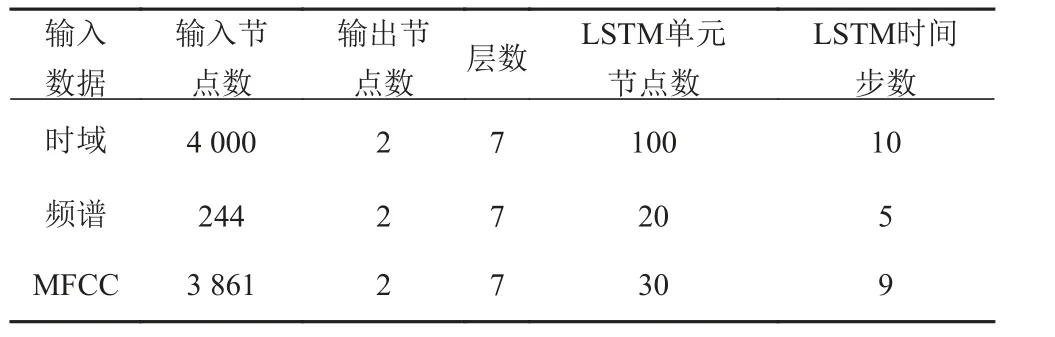
表 1 LSTM 网络参数Tab.1 Parameters of the LSTM
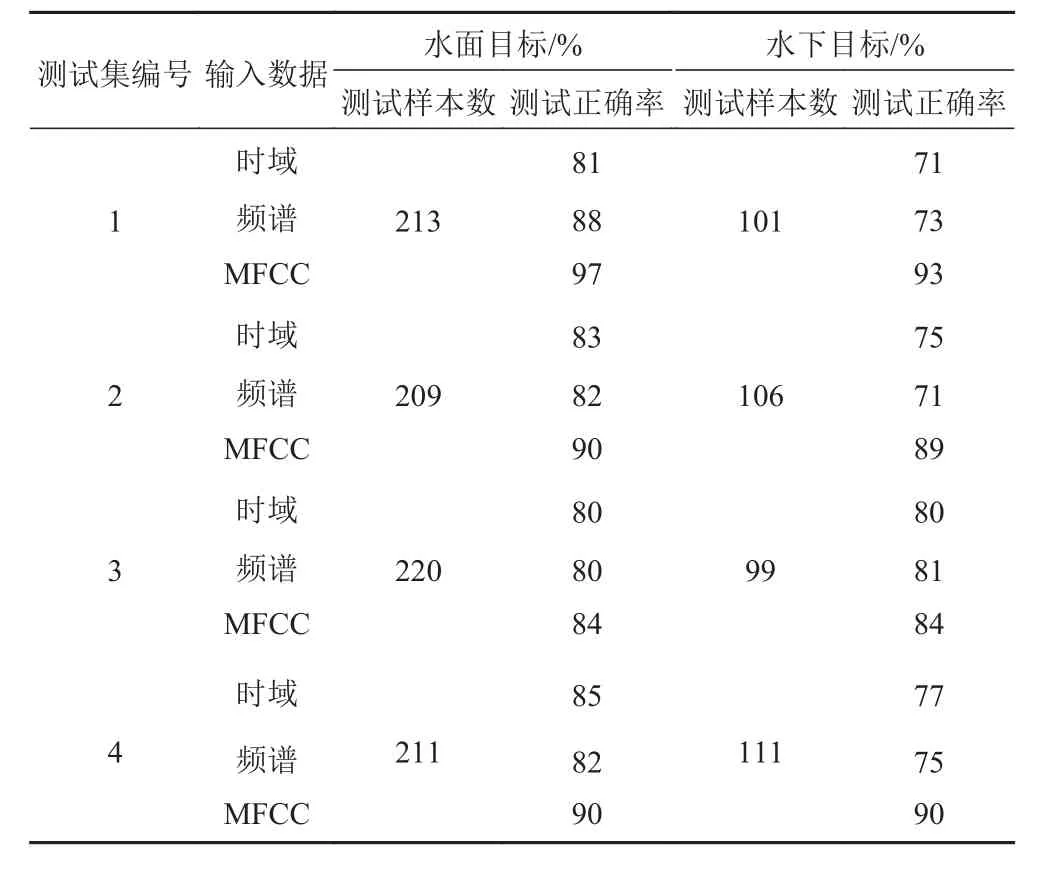
表 2 测试结果Tab.2 Test results
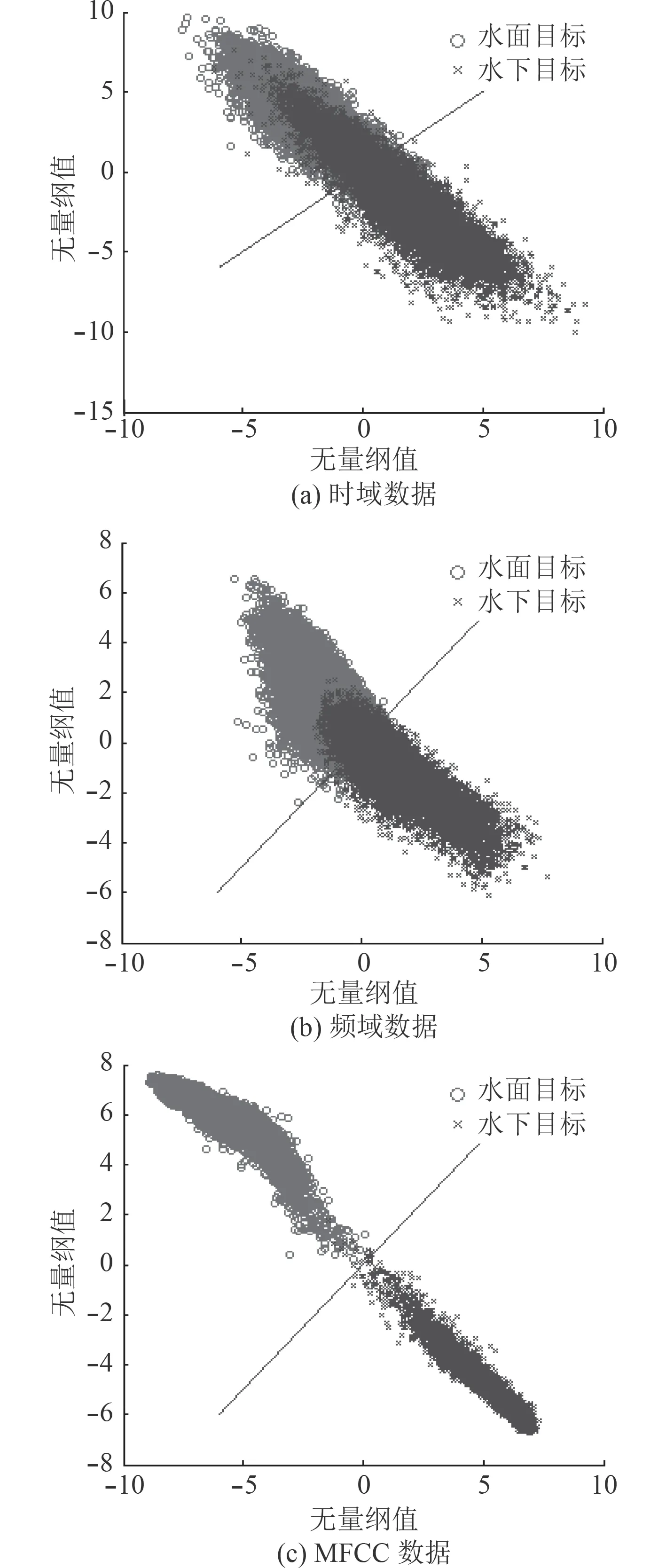
图 3 训练效果图Fig.3 Classification of Training data
3 结 语
本文提出一种基于长短时记忆网络的水下目标智能识别方法。该方法首次将深度学习中的LSTM 长短时记忆网络应用于水下目标噪声识别,分别以噪声信号的时域时间序列数据、频域频谱数据、MFCC 数据作为模型的输入向量,有监督预训练LSTM 模型,并对未知类别的水下目标噪声数据进行了识别分类。识别结果表明,在上述3 种输入数据条件下,该方法能够有效区分水面、水下两类目标。从整个识别分类过程来看,区别于传统水下目标噪声识别方法,该方法能够在不依赖人工提取噪声信号特征向量的基础上对水下目标进行识别,满足未来水下无人移动声学探测平台智能化识别水下目标的需求。
