带扰动观测器的欠驱动水面无人船轨迹跟踪控制
2020-01-14王玉龙刘兆清
张 凯,王玉龙,,刘兆清
(1.江苏科技大学,电子信息学院,江苏 镇江 212003;2.上海大学,机电工程与自动化学院,上海 200444)
0 引 言
水面无人船(Unmanned Surface Vehicle,USV)是一种能够在无人操控的情况下实现自主航行的水面机器人[1]。配备传感器系统、通信系统等不同的功能模块的水面无人船可以被用于执行绘制海图、侦查以及搜救等海上作业任务[2]。船舶轨迹跟踪(Dynamic Tracking,DT)属于广义上的动力定位,具体来说,是船舶在规定的时间内通过轨迹跟踪控制系统的控制到达期望位置上[3]。实现复杂海洋环境下欠驱动水面无人船(控制输入维数小于无人船自由度)轨迹精确跟踪是保证其能够完成各项任务的重要前提,也是当前水面无人船领域研究的热点问题[4]。
由于水面无人船运动方程具有非线性特性,Fossen 等[5]在非线性船舶运动模型基础上设计了反步控制律,并利用李雅普诺夫稳定性理论证明船舶位置信息的全局指数稳定,最终通过这种方法实现了船舶轨迹跟踪控制。然而,考虑到实际被控船舶模型结构的复杂性,在反步控制律设计过程中需要进行复杂的求导运算,容易出现微分爆炸问题。对此,Swaroop 等[6]提出了动态面控制,其核心思想是引入滤波器避免对中间变量求导。此外,在生物神经作用机制的启发下,Yang 等[7]针对机器人控制,提出了将神经动态模型与反步法相结合的方案,该方案不仅解决了反步法控制控制过程中容易出现的微分爆炸问题,还解决控制过程中存在的控制不连续的问题。在后续研究中,文献[8]将该方法应用于水面无人船的运动控制并取得了良好的效果,但该方法没有考虑到船舶运动过程中所遭受到的风、浪、流等外部干扰。为此,文献[9]为实现水面无人船在海洋干扰环境下的轨迹跟踪,设计了一种基于非线性扰动观测器与动态面控制的鲁棒控制器,在存在外界扰动的情况下实现了轨迹跟踪。文献[10]提出自适应模糊反步控制方法,该方法同样采用扰动观测器对扰动进行实时估计,并对控制量进行前馈补偿。此外,现有的航迹跟踪控制方法还常采用神经网络控制[11]以及模糊神经网络[12]等。上述方法都可以逼近外部扰动,但存在收敛速度慢、控制精度低的缺点。
根据以上研究结果,本文考虑扰动环境下水面无人船欠驱动的运动特性,并设计一种带有扰动观测器的水面无人船轨迹跟踪控制器。首先,构造扰动观测器估计未知扰动,对纵荡以及首摇2 个自由度上的控制量进行补偿。然后,为增强系统的抗扰动能力与系统整体动态性能,将位置误差的积分项引入控制系统。在运用反步法设计控制器过程中结合神经网络动态模型,避免微分爆炸以及控制不连续。仿真结果表明,所设计的控制器能够实现轨迹误差的快速收敛并保证较高的控制精度。
1 问题描述
水面无人船是一种能够自主航行的水面机器人,船体无法载人,其质量轻惯性小,受外界扰动影响比较大;此外,大部分水面无人船采用欠驱动设计。考虑运动特性的水面无人船模型可通过如下状态方程描述[13]
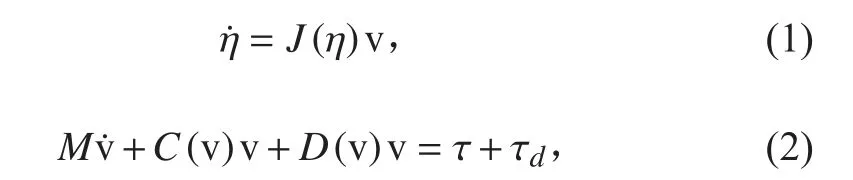
其中, m11, m22, m33和 d11, d22, d33分别为水面无人船系统包括附加质量在内的惯性参数与水动力阻尼系数;参数 C13=-m22v, C23=m11u。
选取水面无人船的参考轨迹为ηd(t),在设计控制器前,给出以下假设:
假设1水面无人船参考轨迹 ηd(t)光滑且有界,即对于任意时间 t > t0, 参考轨迹 ηd(t) 满足,, n1和 n2为正常数。
假设2对于任意时间 t > t0, 外界扰动 τd(t)有界且无突变,即满足和 d2为正常数。
假设3水面无人船在运动中控制输入有界,即满足其 中为 已 知上界。
控制目标:在假设1,假设2 以及假设3 成立的情况下,针对水面无人船非线性模型(1)和(2),设计控制律τ,使得水面无人船在外界干扰下实现对参考轨迹 ηd的精确跟踪。
2 控制器设计
本文所提出的轨迹跟踪控制器设计分为两步:首先,针对无人水面船非线性模型设计扰动观测器,将观测器的输出用作控制量前馈补偿;然后,将位置误差的积分项引入系统,并把反步法与神经动态模型相结合,设计系统控制律。
神经动态模型是本节研究方法的一个重要组成部分,下面对其作简单介绍。神经动态模型是由Hodgkin和Huxley 提出的细胞膜生物模型,结合细胞膜电压特性相关知识,它具有如下表达形式:

式中, xi为第 i 个神经元的动作电位;正常数 B决定神经模型的衰减速率,正常数 C 和 D 分别决定 xi的上界和下界; f(t) 和 g(t)分别为外界的激励输入与抑制输入,二者表达式如下:

2.1 扰动观测器设计
本小节将基于水面无人船非线性模型设计扰动观测器,对纵荡和首摇方向上的干扰进行在线估计,下面给出扰动观测器的设计过程:


定义


2.2 带扰动补偿的控制律设计
本小节将结合扰动观测器的输出设计带扰动补偿的轨迹跟踪控制器,过程中引入位置误差积分项并结合神经动态模型技术。

式中: τTD=[τTD1,0,τTD3]T表示待设计的轨迹跟踪控制律,结合式(2)得

根据式(1),式(9)设计控制律 τTD:
1)运动学控制律设计
引入误差积分项,定义位置误差 e1, e2:

为实现位置误差 e1, e2收敛,构建如下Lyapunov函数:

对 V1求导,并结合式(1),式(10)-式(11)得

由于欠驱动水面无人船在横荡方向上没有控制输入,所以需要用转首速率 r使其横荡方向上的误差收敛。为避免引入横向速度 v的动态方程从而导致依赖u0 的持续激励条件,引入辅助变量 h= vpsinφe,将u 与 h视为虚拟控制输入,令二者期望控制律分别为uc与hc,为实现位置误差ex与ey收敛,设计

式中, A1, A2, K1以 及 K2都是正常数。在接下来的控制器设计过程中为了避免对 hc进行反复求导运算,将hc代入神经动态模型,得到新的虚拟控制量

定义误差变量 zhc=hf-hc, ehc=h-hf为实现辅助控制量误差 ehc和航向角偏差 φe收敛,构建如下增广Lyapunov 函数:

对 V2求导并结合式(13)~式(15)得

根据上式,为实现辅助控制量误差 ehc和航向角偏差 φe收敛,设计 r 的期望控制律 rc为:

综上,运动学控制律设计为式(14)和式(19)。
2)动力学控制律设计
为了避免动力学控制律设计过程中对 uc和 rc作复杂的求导运算,将 uc和 rc分别代入2 个神经动态模型,得到新的虚拟控制输入 uf和 rf:
定义误差变量zuc=uf-uc, euc=u-uf, zrc=rf-rc,erc=r-rf,为实现误差 euc和 erc收敛,设计如下增广Lyapunov 函数:

对式 V3求导并结合式(18)-式(19)得
为实现误差euc和erc收敛,设计动力学控制律

3 系统稳定性分析
本节将分析被控系统的稳定性,证明开始前,给出如下引理及定理:

定理1对于式(1)-式(2)所表示的无人水面船系统,如果按照式(24)-式(25)进行水面无人船轨迹跟踪控制器设计,那么被控系统是稳定的,且跟踪误差收敛至零的小领域内。
构造增广Lyapunov 函数

对 uc求导得


式中,Bu=B1+f(uc)+g(uc)>0。 同理,当设计 B2=C2,B3=C3时,有
式 中, Bh=B2+f(hc)+g(hc)>0 ,Br=B3+f(rc)+g(rc)>0。
如果按照式(24)-式(25)进行水面无人船轨迹跟踪控制器设计,同时令 C1=Bu, C2=Bh以及C3=Br,则有
结合引理1,对式(32)最后5 个不定项使用Young's 不等式,经整理化简得式(32)可表示为具有如下形式的表达式:

4 仿真结果与分析
水面无人船为控制对象,模型参数参考文献[14],其中:m11=200 , m22=250 , m33=80 , d11=70 , d22=100,d33=50。
为了使仿真实验更具有代表性,期望轨迹 ηd选取为如图1 和图6 所示的直线与曲线的组合形式。由(xd1,yd1) ,( xd2,yd2)给出,其具体表达式如下:
为验证本文所设计的轨迹跟踪控制器的有效性,本节以具有式(1)和式(2)形式模型结构的欠驱动
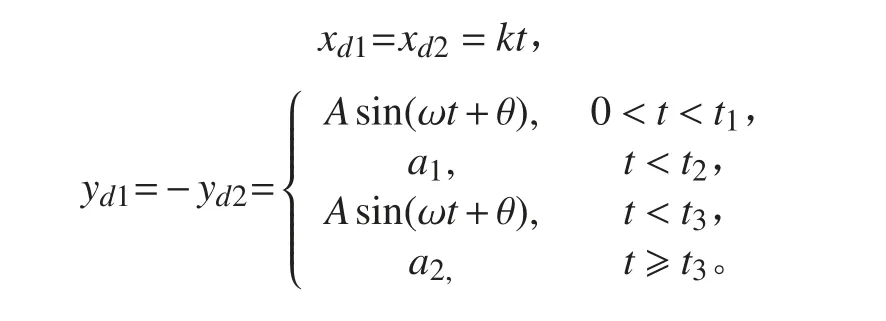
式 中, k= 0.9 , A= 2.1 , ω= π/75 , θ= 0 , a1= 2.1,a2=-2.1 ,t1= 37.5 s ,t2= 112.5 s ,t3= 187.5 s。
水面无人船初始位置 η( 0) 与速度 v(0)分别选择为:η(0)=[0.5,0.5,0]T, v(0 )=[0.3,0.1,0]T;根 据 上 述 推导,扰动观测器参数矩阵设计为: K0=[2,0,2]T;控制器参数设计为: A1=0.2 , A2=0.2 , A3=2 , A4=0.01,A5=0.4 , K1=1.8 , K2=4.3 , B1=B2=B3=5 ,C1=D1=5+f(hc)+g(hc), C2=D2=5+f(uc)+g(uc),C3=D3=8; 系统控制输入上界 τ1max=100, τ3max=50。
4.1 常值扰动下的水面无人船运动
低级海况下的扰动一般表现为常值,取常值扰动向量 τd=[20N,20N,10N]T,水面无人船在常值扰动下数据仿真结果如图1~图5 所示。从图1 和图2 可以看出在常值扰动下,设计的控制器能够快速实现水面无人船对期望轨迹 ηd的位置跟踪。图3 反映了水面无人船的控制输入 τ= [τ1,0,τ3]T随时间的变化关系;图4反映了在控制输入作用下水面无人船的速度响应曲线,可以发现在控制器的作用下,即使船体横荡方向上没有控制输入,侧向速度 v还是较快的趋近于某一稳定值附近,这是在 τ3的作用下为了抵抗外界扰动而产生的横向速度;图5 显示了外界扰动 τd1, τd3及扰动观测器对其估计量之 间 的 关 系,可 以看出,本文设计的扰动观测器能够较快的实现对外界干扰的实时估计。
4.2 时变扰动下的水面无人船运动
高级海况下的扰动力或者力矩可以看成不同频率信号的叠加。取时变扰动向量
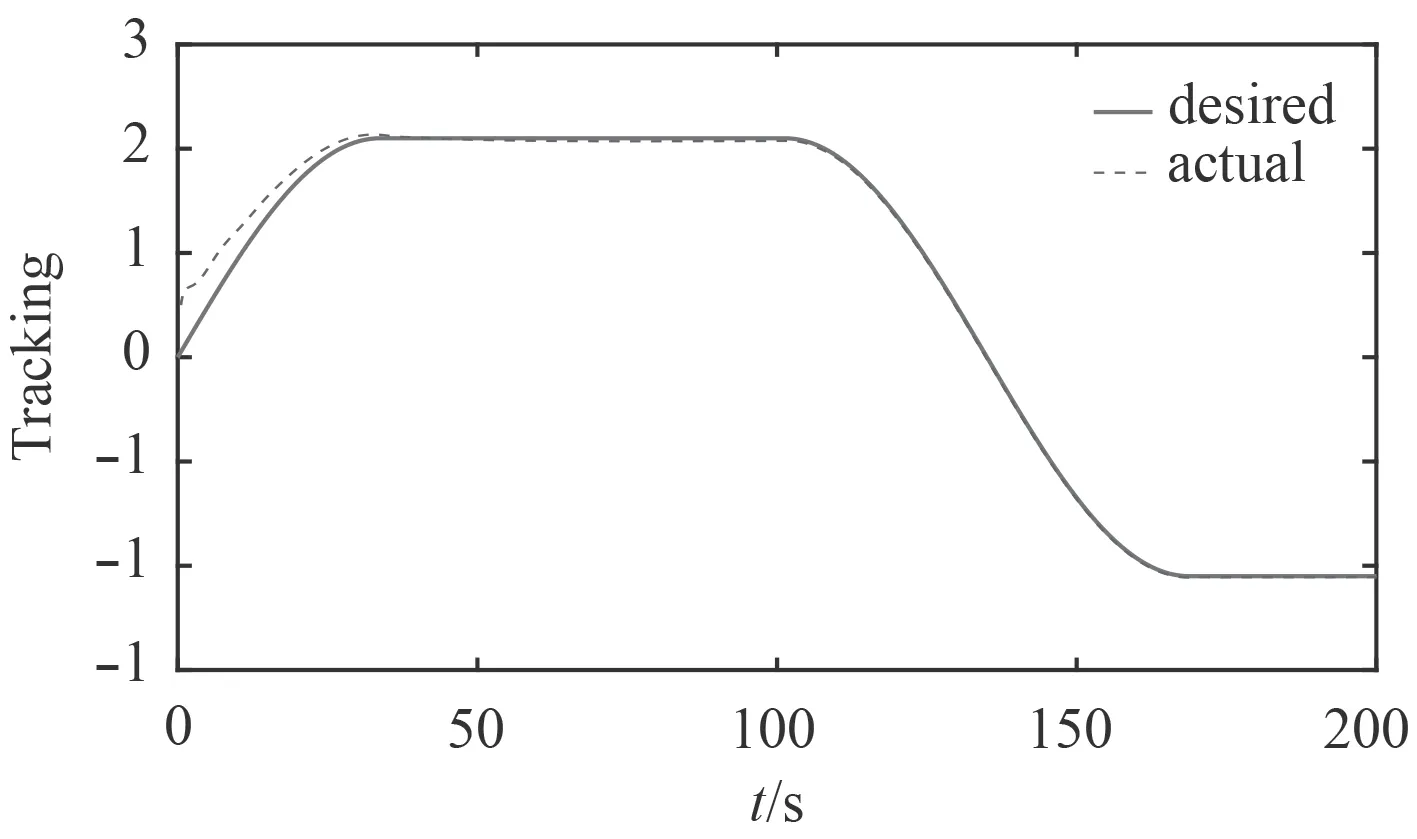
图 1 常值扰动下USV 运动轨迹Fig.1 Motion trajectories of the USV under constant disturbance
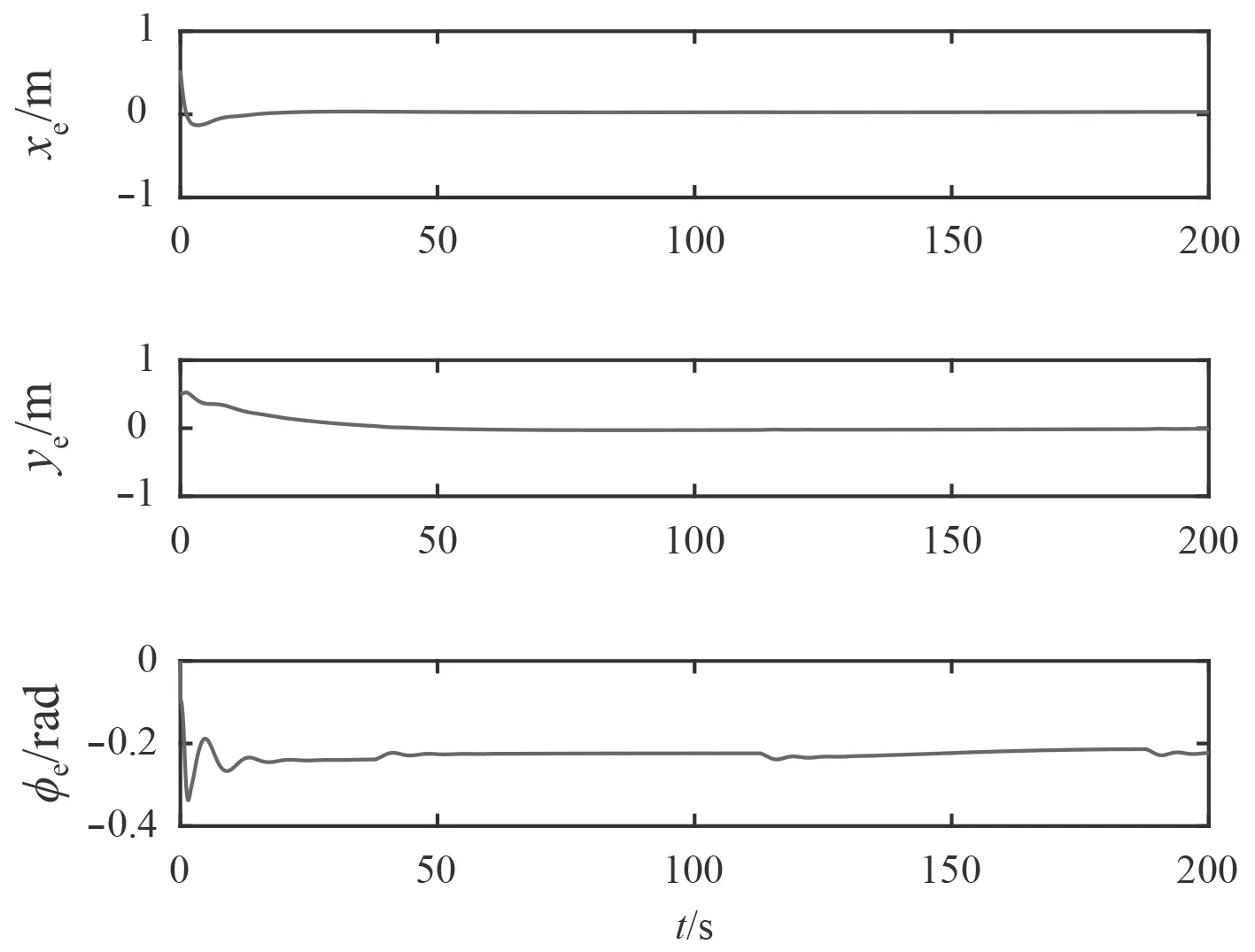
图 2 常值扰动下USV 跟踪误差Fig.2 Tracking errors of the USV under constant disturbance
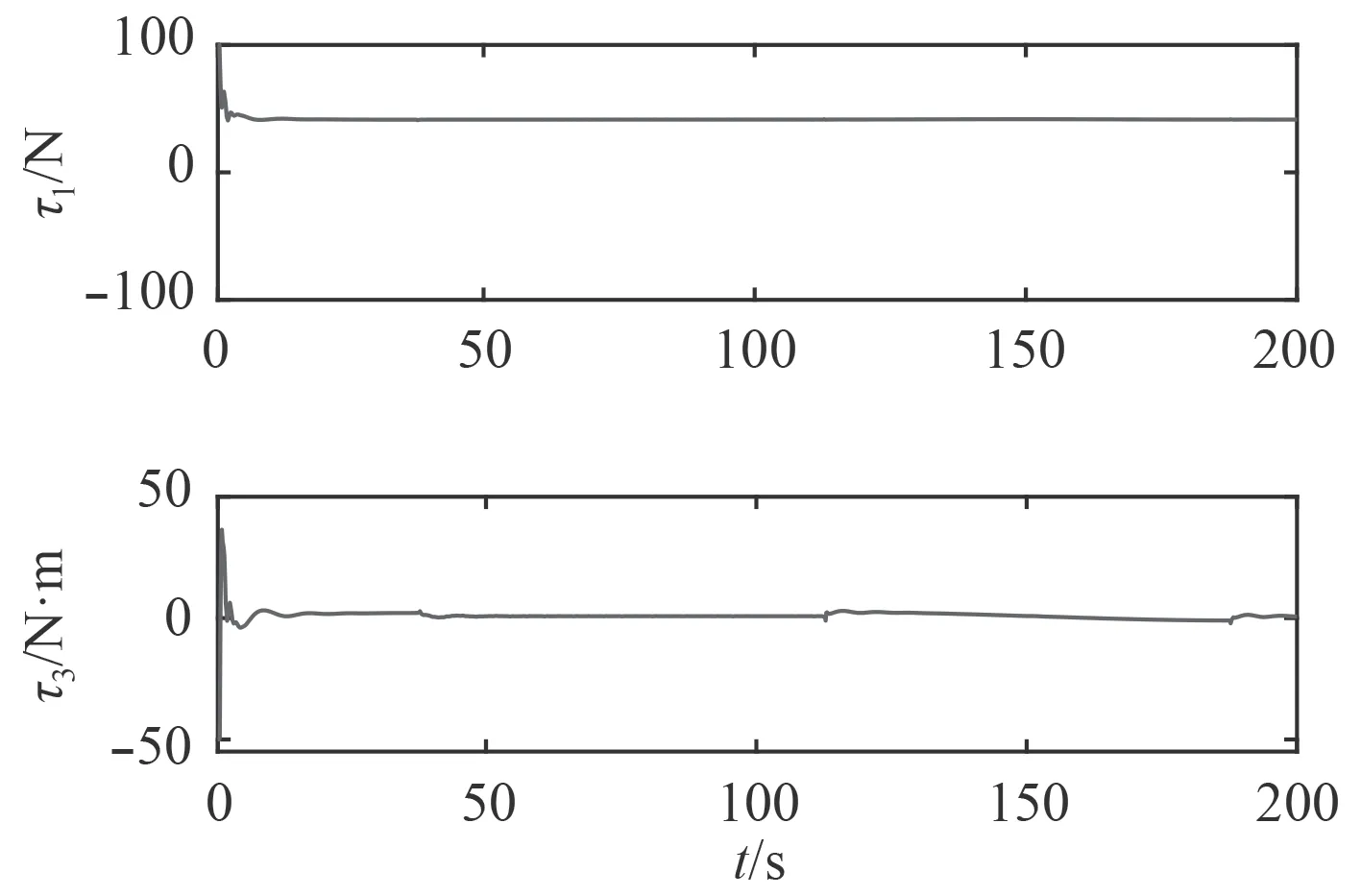
图 3 常值扰动下USV 控制输入Fig.3 Control inputs of the USV under constant disturbance
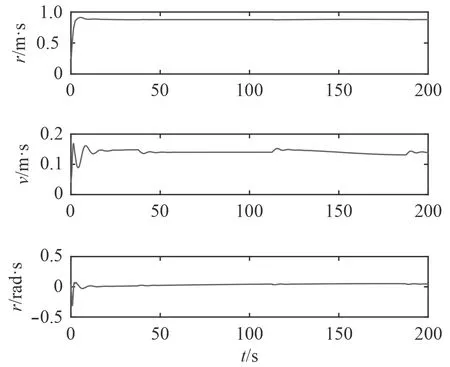
图 4 常值扰动下USV 速度Fig.4 Velocities of the USV under constant disturbance
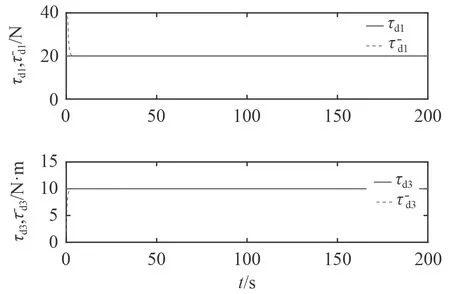
图 5 常值扰动实际值与观测值Fig.5 The actual and observed values of constant disturbance

图 6 时变扰动下USV 运动轨迹Fig.6 Motion trajectories of the USV under time-varying disturbance
水面无人船在时变扰动下数据仿真结果如图6~图10所示。从图6 和图7 可看出水面无人船在时变扰动下同样能实现对期望轨迹 ηd的跟踪。从图8 和图9 可以看出,由于控制律中包含着补偿扰动的抑制项,所以控制输入 τ 以及速度 v出现了一定幅度的振荡。图10 显示设计的扰动观测器在时变扰动下仍然能快速准确地估计外界扰动。
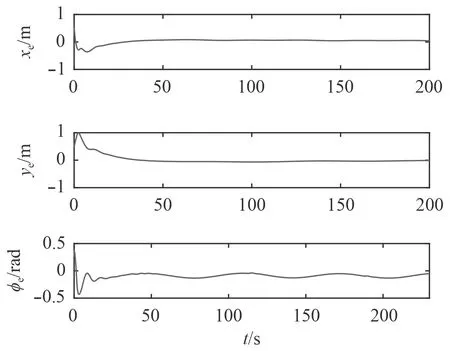
图 7 时变扰动下USV 跟踪误差Fig.7 Tracking errors of the USV under time-varying disturbance
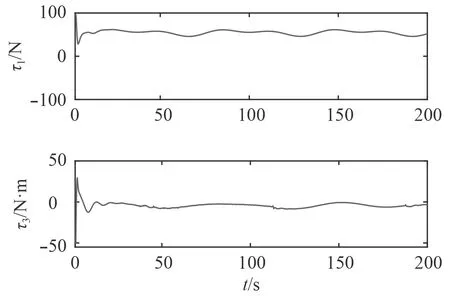
图 8 时变扰动下USV 控制输入Fig.8 Control inputs of the USV under time-varying disturbance
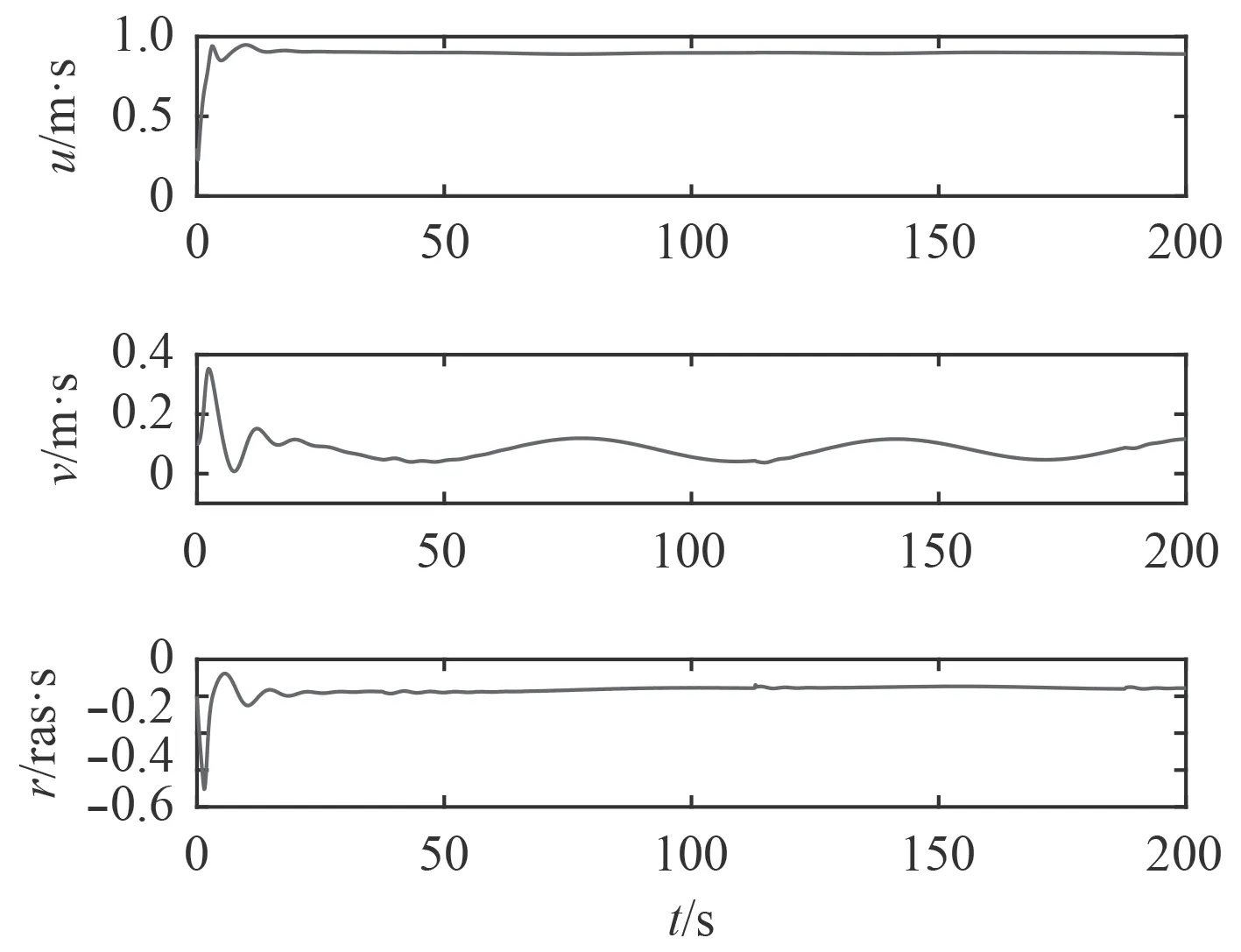
图 9 时变扰动下USV 速度Fig.9 Velocities of the USV under time-varying disturbance
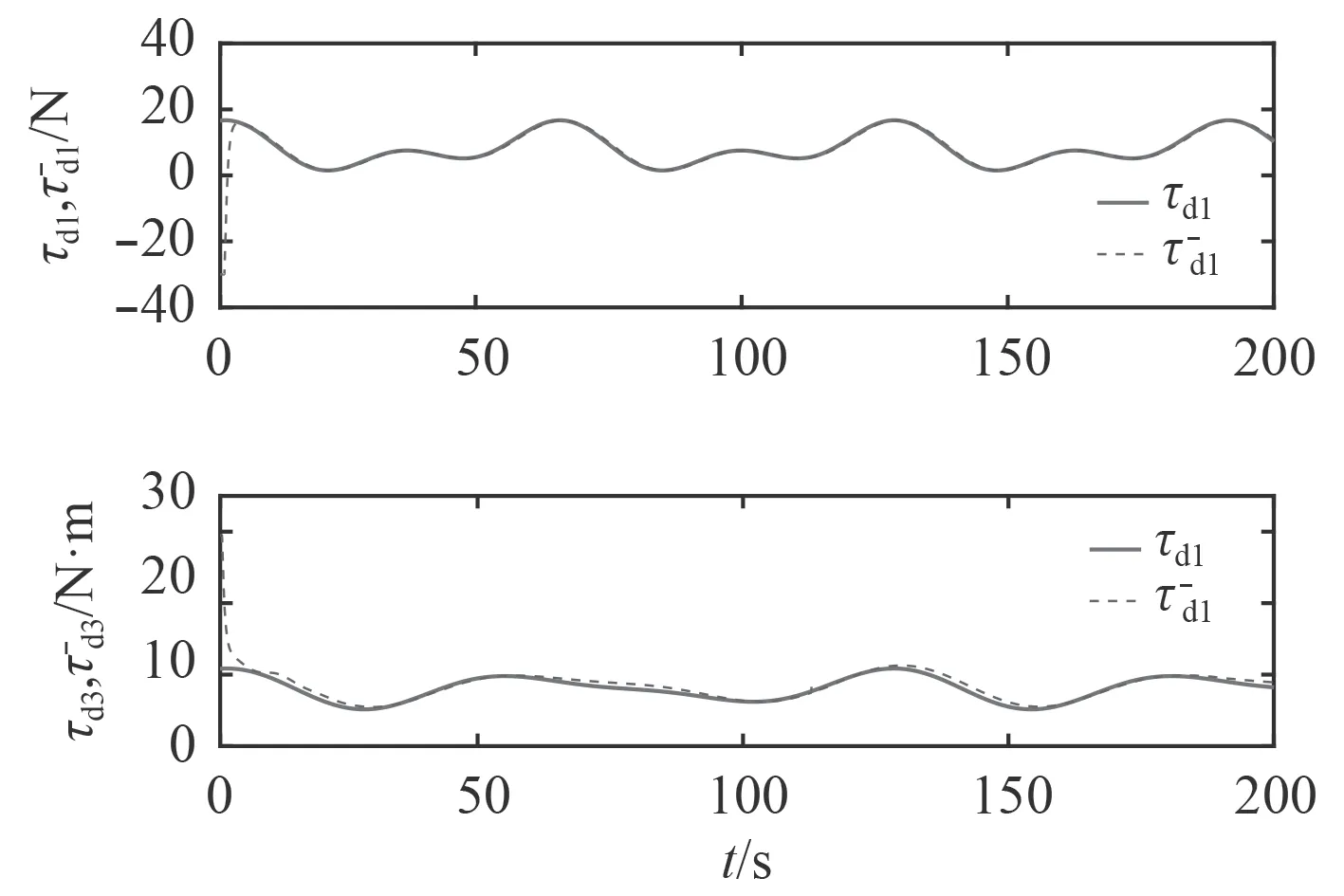
图 10 时变扰动实际值与观测值Fig.10 The actual and observed values of time-varying disturbance
5 结 语
本文考虑水面无人船欠驱动以及存在外界扰动的运动特性,构造扰动观测器估计未知扰动,对纵荡以及首摇2 个自由度上的控制量进行了补偿,并通过引入位置误差积分项增强了系统抗干扰能力。在根据反步法进行控制器设计过程中结合神经动态模型,简化了控制器设计的同时有效避免了速度跳变的出现。由仿真结果可以看出,所设计控制器的各项控制输出合理,跟踪精度高,具有一定的工程应用价值。
