海上异构无人装备一体化协同作战架构
2020-01-14李凌昊张晓晨
李凌昊,张晓晨,王 浩,刘 耿
(中国船舶工业系统工程研究院,北京 100094)
0 引 言
未来的战场环境日益复杂,战场空间全面覆盖陆、海、空、天、电、网等多个纬度,夺取信息优势成为克敌制胜的关键,新概念武器的作战性能和杀伤力也越来越大,对战争具有决定因素的人面临的挑战日益严峻,而无人平台具备执行“枯燥的、恶劣的、危险的、纵深的”(Dull,Dirty,Dangerous,Deep)4D 任务的特性,因此迫切需要无人化的装备替代人来完成各种作战任务。以水面无人艇、无人机为代表的无人平台在现代战争中的应用优势明显,具有反侦察能力强、工作持续时间长、不担心人员伤亡、可操作性强、侦察能力强、可担负多种作战任务等特点,已经被越来越多地应用于执行多种危险和复杂的任务。
海上异构无人装备一体化协同作战是指在海上编队作战体系顶层一体化设计要求下,将不同类型、不同能力的无人装备进行面向能力的集成和协同,以完成特定的作战任务。以无人艇与无人机为例,将无人艇与无人机有机结合、协同控制,能够提升对中、小目标的海空探测打击的时敏性、范围、持续工作时间,形成海空一体的侦察、监视、打击系统,可高效完成警戒监视、协同探测、对海打击等作战任务,充分发挥无人艇、无人机在海战中的综合作战效能。但无人艇、无人机是2 种不同类型的无人平台,存在强烈的“异构”特征,主要表现为行为模式、作战域、作战任务能力和智能水平4 个方面的差异。这些异构特征使操控工作量和复杂度大幅增加,操控人员的专注程度削弱,导致无人系统的综合作战效能难以达到期望。因此,为充分发挥无人艇、无人机等异构无人装备整体协同作战效能,需要开展异构无人装备作战概念研究,构建扁平高效的异构无人装备协同作战控制体系架构,提高异构无人系统自主性,增强系统自组织和自适应能力。
1 海上异构无人装备一体化协同作战概念
水面无人艇通常依靠遥控或自主方式在水面航行,具有不同程度的自主性。主要用于执行危险或者不适于有人船只执行的任务。无人艇可以搭载在其他大中型水面舰艇上,利用其自主性强、低可探测性、带载能力大、持续工作时间长、费效比高、避免人员伤亡等综合优势,扩大现有舰艇编队的作战能力、管控范围,形成局部战术技术优势,达到影响战争结果的目的。无人艇配备先进的控制系统、传感器系统、通信系统和武器系统后,可以执行侦察、警戒监视、水文地理勘察、反潜反水雷、对海突击、海上搜救等不同任务。但无人艇在执行任务时,仍存在航速较慢、传感器探测范围和通信距离较近等短板,对无人艇执行任务的覆盖能力、时效性影响较大。
相比于水面无人艇,无人机则具有飞行速度快、传感器探测范围广的优势,在近些年的部分战争中,无人机逐渐开始扮演越来越重要的角色,其侦察、打击能力优势得到了充分发挥,但其带载能力弱、持续工作时间短,极大限制了在海战中的应用。
目前,水面无人艇与无人机基本上是以相对独立的方式运行。尽管两者在功能性能上存在较强的互补性,具有极强的协同作战潜力,但针对警戒监视、协同探测、对海打击等典型作战任务时,对水面无人艇与无人机各自应侧重承担的使命任务,以及水面无人艇与无人机的类型、数量、性能要求、协同方式等均不明确。
根据水面无人艇与无人机的平台特点及作战任务,水面无人艇与无人机异构无人平台协同作战主要有以下样式:
1)以无人艇为跨域中心协同作战
以无人艇为中心进行跨域整合,利用其相对大的有效载荷、大功率储备,以及更长的续航能力,为无人机等其他无人平台提供服务,如通信中继、数据预处理及决策、能源等,使得无人机等可以实现更远距离的作业,增强其他无人平台作战能力。
2)异构平台一体化协同打击作战
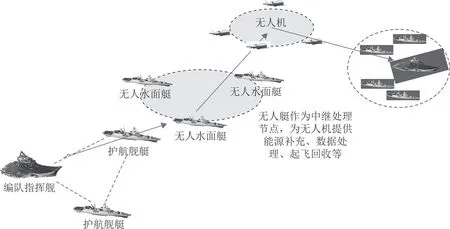
图 1 以无人艇为跨域中心示意图Fig.1 Unmanned surface vehicles as cross-domain center
利用无人机、无人艇隐蔽性强、毁伤代价低、机动灵活等特点进行态势感知、目标攻击、跨平台制导、协同防御、效能评估等;同时可采用声东击西战术,让一部分无人装备作为诱饵,将敌方防空反导等火力吸引到不相干的方向,而让另一部分无人装备或有人平台趁虚而入,对敌方高价值目标进行致命打击。
3)异构平台协同探测隐身目标
1.2.1 调查表 自行设计:①久卧病患照护者一般资料调查表;②久卧病患照护者30°侧卧位翻身护理掌握测评表;③久卧病患压疮分期标准表。调查表以《临床护理技术规范》[1]、《成人压疮预测和预防实践指南》[2]相关防压疮理论为依据。
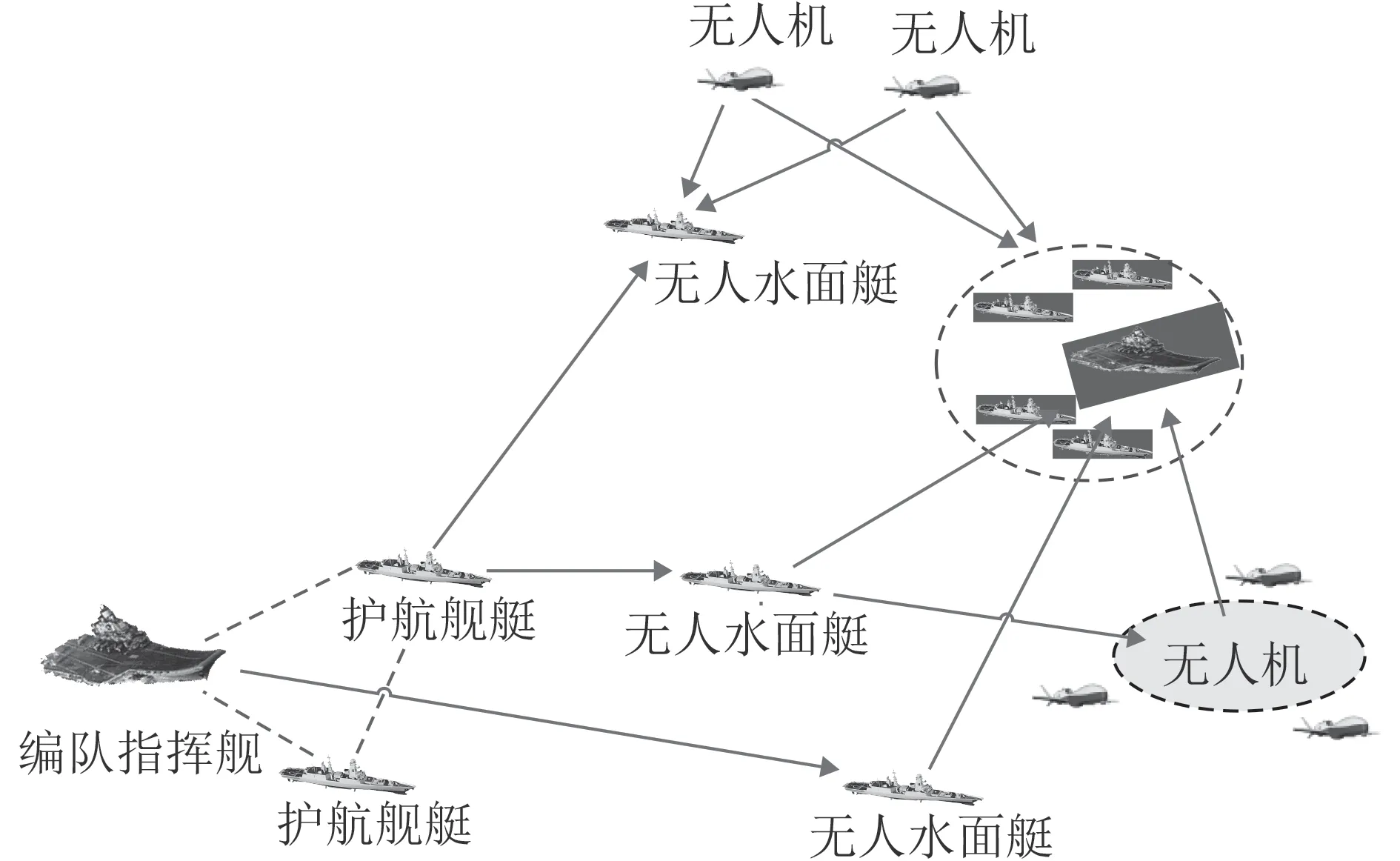
图 2 协同探测打击示意图Fig.2 Cooperative detection and strike
充分利用无人机、无人艇等无人平台前出距离远,不易被发现等特点,结合有人平台从全方位立体侦察探测敌方隐身飞机,实现对敌方隐身目标的提前发现。
2 海上异构无人装备协同作战控制体系架构初步设计
由于水面无人艇与无人机在行为模式、作战任务能力等多方面都存在巨大差异,同时由于目前无人艇与无人机的研制与使用几乎完全独立,导致其控制体系架构的差异性较大,无法直接实现互联互通互操作,需开展基于单无人平台的水面无人艇与无人机通用自主控制体系架构的研究。在此基础上,若要实现水面无人艇与无人机集群协同作战,需进一步针对同型无人平台集群协同以及异构无人平台间集群协同开展研究。形成异构无人装备协同作战控制体系架构。
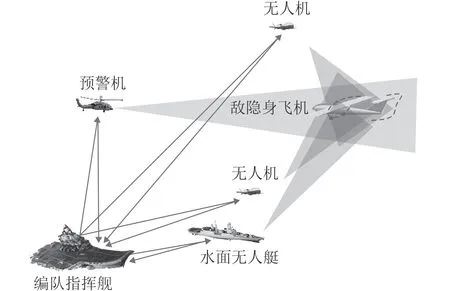
图 3 异构无人平台协同探测隐身目标Fig.3 Cooperative detection of stealth targets by heterogeneous unmanned platforms
如图4 所示,本文提出了一种异构无人装备一体化协同控制体系架构的初步设想,包括指挥节点控制与态势监控模块、异构无人装备一体化协同作战控制模块、异构无人集群协同任务规则知识图谱模块、异构无人装备协同自主实时决策模块。
1)指挥节点控制与态势监控模块
一般部署在有人指挥节点,主要承担指挥节点对异构无人装备协同作战的指挥控制,向无人平台发送协同作战任务行动序列等作战指令,同时实时监控战场态势与编队内各无人平台状态,进行临机调整。
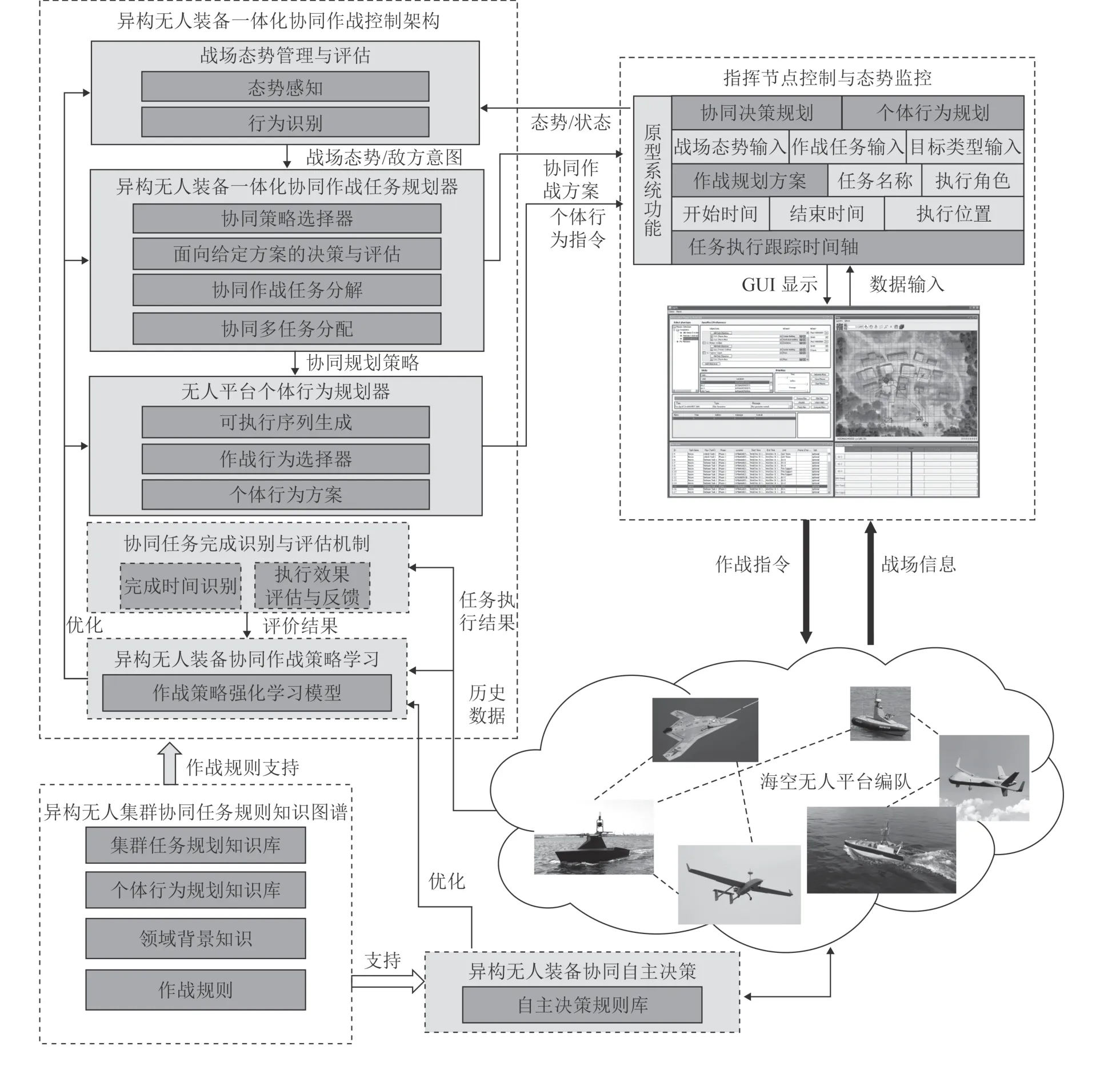
图 4 异构无人装备多协同控制体系架构初步设想Fig.4 Collaborative control architecture of heterogeneous unmanned equipment
2)异构无人装备一体化协同作战控制模块
集中部署在有人指挥节点,或采用分布式方式直接部署在编队内各无人平台,该模块主要承担以下任务:
异构无人装备一体化协同作战任务规划。根据战场态势、敌方意图,进行协同作战策略的选择,对协同方案进行决策评估,并对形成的协同作战任务进行细粒度分解,开展协同多任务的分配,并将形成的协同作战方案反馈给指挥节点控制与态势监控模块。
无人平台个体行为规划。在异构无人装备一体化协同作战任务规划基础上,根据协同规划策略,形成平台可执行行动序列,进行各无人平台的行为选择,明确个体行为方案,并将个体行为指令上报给指挥节点控制与态势监控模块。
协同任务完成识别与评估。异构无人平台在实际协同作战过程中将任务执行结果实时上报,进行任务完成时间与执行效果的评估。
异构无人装备协同作战策略学习。根据历史数据及异构无人平台协同作战任务执行评价结果,通过搭建作战策略强化学习模型,在异构无人集群协同作战任务规则知识图谱的支撑下,实现对异构无人装备协同作战策略的学习更新,同步优化战场态势感知、任务规划、个体行为规划功能。
3)异构无人集群协同任务规则知识图谱模块
支撑异构无人装备协同作战的策略学习和更新,包括集群任务规则知识库、个体行为规划知识库、领域背景知识及作战规则等。
4)异构无人装备协同自主实时决策模块
部署在编队内无人平台,基于自主决策规则库,支撑无人平台在实际协同作战过程中的自主决策。
基于该协同控制架构,在实际协同作战过程中,以战场态势作为输入,进行战场态势感知和行为识别管理,在指挥员的有限参与下形成作战方案和具体的协同作战任务,并将战场任务进行分解表示,进一步按照无人艇与无人机等异构无人装备作战单元的不同特性和能力,将任务分配到具体的无人平台单元,并将任务进行个体行为规划,输出可执行的带时序行为序列,编译形成对无人平台的指控指令反馈给无人平台,水面无人艇与无人机等各型无人平台根据作战指令进行任务执行,在执行过程中,面对各类情况触发,根据自主决策规则进行快速反应,同时进行无人平台协同作战策略学习,将无人平台执行作战任务的历史数据作为样本,利用强化学习模型反复学习,不断优化自主决策规则,进一步完善任务规划原则,提高对战场态势的理解和策略选择的精确性,不断提升水面无人艇与无人机协同控制能力。
3 结 语
本文分析了水面无人艇、无人机作战使用特点、任务执行能力,以及水面无人艇与无人机在行为模式和作战任务能力等方面的不同,面向异构无人装备差异化体系架构,针对性提出了以无人艇为跨域中心协同作战、异构平台一体化协同打击作战、异构平台协同探测隐身目标等作战概念,分析了海上异构无人装备一体化协同机制,初步建立了海上异构无人装备一体化协同控制体系架构,后续结合各型无人平台实际能力及面向的作战任务,进一步开展体系架构深化设计工作。
