电动自行车无线充电EV-DWPT系统导轨组群控制策略研究
2020-01-11洪伟许挺挺阮立傅万进何聪
洪伟 许挺挺 阮立 傅万进 何聪

[摘 要 ]随着电动自行车的不断普及,传统的接触式充电方式(接插件插拔方式)存在着易漏电、接触损耗、机械磨损和接口限制等弊端,并且车载动力电池组存在着储能容量有限、电池组笨重昂贵等问题,都极大地限制了电动自行车的发展与推广。基于无线电能传输技术的电动自行车动态无线供电(EV-DWPT)系统通过埋设在道路下方的磁能发射导轨以非接触的方式为行进中的车辆进行实时连续供电,保证了电动自行车的实时动态电能补给,这种无线补电方式,克服了车载动力电池组续航局限的问题。另一方面,采用这种动态无线供电方式,有利于降低车载动力电池组的容量配置,甚至取代车载电池。本文面向长距离EV-DWPT系统,重点围绕EV-DWPT系统的导轨系统的优化设计、导轨切换可靠性问题、导轨动态运行控制策略及系统鲁棒性等方面展开深入研究,为EV-DWPT系统规划、设计、实现与运行,提供重要的支撑。
[关键词]电动自行车;无线电能传输;优化与控制
[中图分类号]U469.72 [文献标志码]A [文章编号]2095–6487(2020)07–00–05
[Abstract]With the continuous popularization of electric bicycles, the traditional contact charging method (connector plugging method) has disadvantages such as easy leakage, contact loss, mechanical wear and interface limitation, and the on-board power battery pack has limited energy storage capacity Problems such as bulky and expensive battery packs have greatly restricted the development and promotion of electric bicycles. The electric bicycle dynamic wireless power supply (EV-DWPT) system based on wireless power transmission technology provides real-time and continuous power supply to the moving vehicle in a non-contact manner through the magnetic energy emission guide buried under the road, ensuring the real-time dynamic power supply of the electric bicycle . This wireless power supply method overcomes the problem of battery life limitation of the vehicle power battery pack; on the other hand, the use of this dynamic wireless power supply method is beneficial to reduce the capacity configuration of the vehicle power battery pack, or even cancel the vehicle battery. This paper is oriented to the long-distance EV-DWPT system, focusing on the optimization design of the guideway system of the EV-DWPT system, the reliability of guideway switching, the dynamic operation control strategy of the guideway, and the robustness of the system. Thesis work provides important support for the planning, design, implementation and operation of the EV-DWPT system.
[Keywords]electric bicycle; wireless power transmission; optimization and control
基于多級导轨分时供电方式的EV-DWPT系统,如果采用导轨顺序逐级激活的分时供电方式,行驶速度较快的车辆,由于导轨电磁暂态过程和导轨驱动装置切换时开关延迟时间的存在,可能会出现车辆失电或车辆稳定受电时间太短而电能补给不足等问题。因此在系统应用过程中,导轨驱动系统需要根据车辆运行状态确定激活导轨的位置以及数量。为了既降低系统的运行成本(损耗、维护等费用),又能够保证车辆能够有效稳定地获取电能,需要对分时供电中每次激活导轨的位置以及同步激活导轨的数量等进行优化,而这个优化模型和结果与车辆行驶速度和道路坡度等客观因素相关。本文将构建动态无线供电系统导轨组群控制模型,旨在计算车辆行驶过程中每次激活导轨的位置以及同步激活导轨的数量,为全程动态无线供电系统导轨驱动系统提供控制的依据。
本文首先分析了电动自行车的行驶特性以及车载储能装置的能量动态特性,而后以系统年运行成本的最小化为目标函数,考虑了车载储能装置能量状态以及导轨长度等为约束条件,建立了关于导轨组群的控制模型。针对建立的模型,采用基于粒子群的混合遗传算法(Particle Swarm Genetic Algorithm,PSGA)进行求解,利用改进的交叉算子提高算法的搜索效率。最后,通过一个算例验证了模型和算法的可行性。
1 导轨组群控制模型的描述
为保证EV-DWPT系统的年运行成本最小化,建立了导轨组群的控制模型,完成导轨组群的控制方案以及能量储存装置最优容量的确定。
1.1 基本符号定义
电动自行车行驶在已知路况的道路上,道路的最高时速、坡度等参数已知,且该道路的总长为L。
当电动自行车行驶在激活的导轨上时,WPT系统能够提供足够的功率供电动自行车使用。
定义t为一个连续的时间变量,表示电动自行车从无线供电道路起始点开始行进的时间。
1.2 优化变量分析
EV-DWPT系统实现了电动自行车行驶过程中的电能补给和实时供电,在应用过程中,可以分为两种模式:
模式1:当继电器KSi断开,继电器KS2、KS3闭合,WPT系统给电池组充电,动力电池组供给电机需要的能量,实现了电动自行车行驶状态下的电能补给,有效解决了电动自行车由于其动力电池组储能不足而影响车辆续航里程的问题;
模式2:当继电器KSi闭合,继电器KS2、KS3断开,WPT系统直接为电机供电,该模式下可以取消车载动力电池组,从而从根本上解决了电池组容量与成本问题,一般应用于定线路短里程电动自行车、观光游览车、仓储搬运车等场合。
模式2中,为保证电能的稳定,所有导轨在运行周期内均需要参与工作,使系统的运行成本偏高。因此,在定线路短里程电动自行车应用场合中,可以通过增设一定容量的储能装置以降低系统的运行成本。由于超级电容具有充电速度快、使用寿命长、质量轻等优点,一般可选取超级电容作为模式2的储能装置。
模式1中,当车辆行驶在激活的导轨(红色导轨)上时,WPT系统给电池组充电,电池组供给电机需要的能量。当车辆行驶在待机的导轨(紫色导轨)上时,由电池组为电机提供电能。
模式2中,当车辆行驶在激活的导轨上时,整流后的电压高于超级电容电压,WPT系统给车辆供电的同时也给超级电容充电;当超级电容电压达到最大值后,WPT系统只给车辆供电,当车辆行驶在待机的导轨上时,由超级电容为电机供电,。
EV-DWPT系统中,当设置的储能装置的容量较大时,系统运行过程中激活的导轨总长度可以相对较小。当设置的储能装置的容量较小时,系统运行过程中激活的导轨总长度相对较大。因此导轨的控制方案(每次激活导轨的位置和数量)和储能装置的容量之间存在一个平衡点,既可以保证EV-DWPT系统的稳定可靠运行,又可以使整个系统的运行成本最小。故系统优化变量为导轨的控制方案和储能装置的容量C。图中,吋表示第i段激活导轨的起始点,同时也表示第M段待机导轨的终点。吋表示第i段激活导轨的终点,同时也表示第i段待机导轨的起始点。第i段激活导轨是由若干个分段导轨组成的运行导轨组,第i段待机导轨也是由若干个分段导轨组成的休眠导轨组。
2 电动自行车行驶特性分析
汽车在道路上行驶时,必须有足够的驱动力来克服各种行驶阻力,设电动自行车的驱动力为尺。行驶过程中的阻力主要包括:空气阻力、滚动阻力、坡度阻力、加速阻力。因此,可得到汽车的运动方程式为:
当车辆行驶在激活的导轨上时,WPT系统提供电动自行车所需的功率。当电动自行车行驶在待机的导轨上时,由储能装置供给电动自行车所需的功率。设导轨激活时能量储存装置提供的功率为,考虑一定的机械传输损耗,则能量储存装置提供的功率可以表示为:
3 导轨组群控制模型的建立
3.1 目标函数
以系统年运行成本Tope的最小化作为导轨组群控制策略研究的目标:
式(3)中,第一项表示N段激活导轨的年运行成本,第二項表示电动自行车安装的能量储存装置的成本。
3.2 导轨组群控制模型
本文接下来主要围绕EV-DWPT系统工作模式2展开,即以超级电容作为储能装置的应用场合,而以电池组作为储能装置的应用场合,可参考超级电容应用场合的分析,本文不做详细的阐述。
综上所述,可得到EV-DWPT系统的导轨组群控制模型如下:
对式(4)所描述的控制模型,本文采用基于粒子群的混合遗传算法(PSGA)求解。
4 基于粒子群的混合遗传算法
粒子群算法(Particle Swarm Optimization,PSO)源于对鸟群觅食行为的研究,是一种模拟自然界的生物活动的随机搜索算法,算法不需要交叉和变异操作,粒子具有记忆功能,粒子根据记忆的自身经验(粒子的最优位置)和群体经验(种群的最优位置)来更新自身的状态。在PSO中,粒子是通过当前搜索到的最优位置进行共享信息,是一种单向信息流动的过程,其搜索过程是当前最优解的过程。而在GA中,染色体之间互相共享信息,整个种群较为均匀地朝着最优区域的方向进化。因此,一般情况下,PSO在收敛速度方面优于GA。本文中采用的PSGA将PSO共享信息的方式与GA的编码及遗传操作相结合,以提高算法的搜索效率。
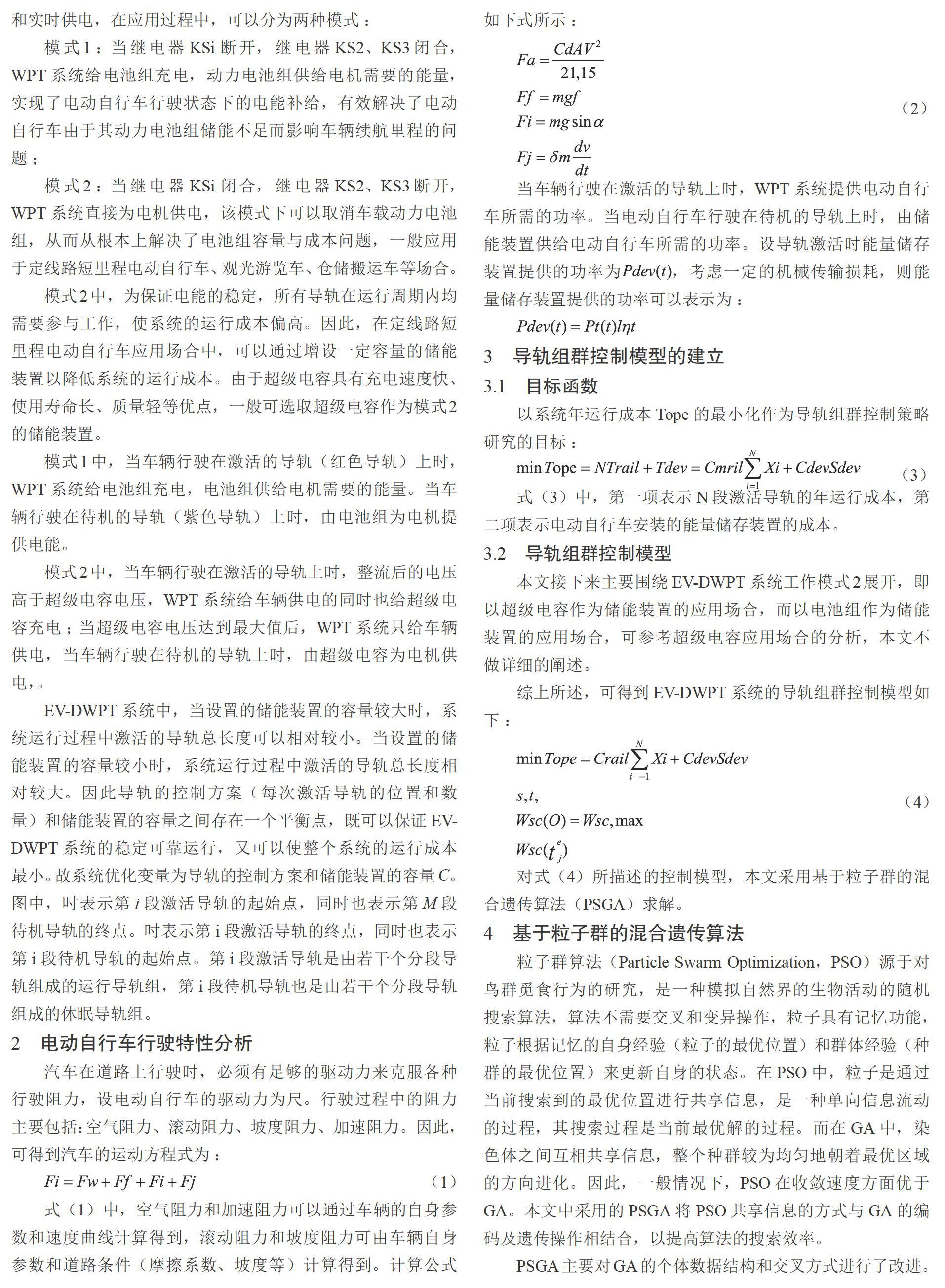
PSGA主要对GA的个体数据结构和交叉方式进行了改进。改进的数据结构中添加了个体的自身经验信息,保留了个体在搜索过程中的最优编码,改进的交叉操作不仅融合了其他个体的信息,也融合了该个体的自身经验信息。如图1所示。
PSGA中,编码和解码方案以及遗传操作中的选择和变异过程与GA相同,遗传操作中的交叉过程不同于GA,后文将详细阐述。算法进化过程中,个体七的适应度值(Fg)计算公式为:
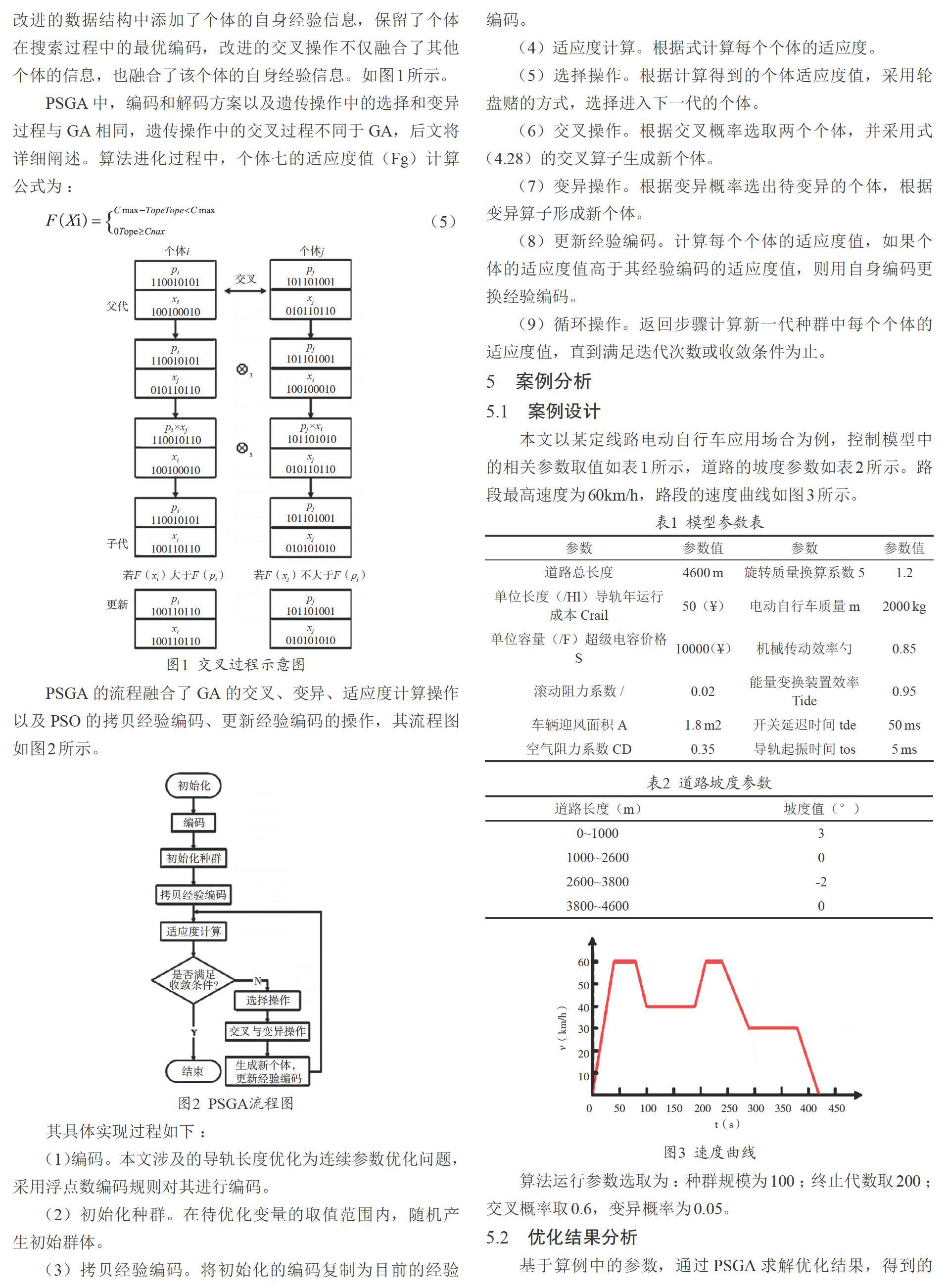
PSGA的流程融合了GA的交叉、变异、适应度计算操作以及PSO的拷贝经验编码、更新经验编码的操作,其流程图如图2所示。
其具体实现过程如下:
(1)编码。本文涉及的导轨长度优化为连续参数优化问题,采用浮点数编码规则对其进行编码。
(2)初始化种群。在待优化变量的取值范围内,随机产生初始群体。
(3)拷贝经验编码。将初始化的编码复制为目前的经验编码。
(4)适应度计算。根据式计算每个个体的适应度。
(5)选择操作。根据计算得到的个体适应度值,采用轮盘赌的方式,选择进入下一代的个体。
(6)交叉操作。根据交叉概率选取两个个体,并采用式(4.28)的交叉算子生成新个体。
(7)变异操作。根据变异概率选出待变异的个体,根据变异算子形成新个体。
(8)更新经验编码。计算每个个体的适应度值,如果个体的适应度值高于其经验编码的适应度值,则用自身编码更换经验编码。
(9)循环操作。返回步骤计算新一代种群中每个个体的适应度值,直到满足迭代次数或收敛条件为止。
5 案例分析
5.1 案例设计
本文以某定线路电动自行车应用场合为例,控制模型中的相关参数取值如表1所示,道路的坡度参数如表2所示。路段最高速度为60km/h,路段的速度曲线如图3所示。
算法运行参数选取为:种群规模为100;终止代数取200;交叉概率取0.6,变异概率为0.05。
5.2 优化结果分析
基于算例中的参数,通过PSGA求解优化结果,得到的优化结果如表3所示。该路段共激活14段导轨,超级电容容量C伽为4.5F,最小年运行成本几妙为10.226万元。
由表3可知,得到的激活导轨优化量是关于长度的数值,结合第二文对系统的整体规划,本文以表2中方案7为例,即单段导轨长度为4.09 m,可以得到每次激活导轨的位置以及同步激活导轨的数量,如表4所示。
表4中,激活的导轨组(7,32)中的7表示第7段导轨,即激活导轨的位置,(7,32)表示需要同步激活导轨的数量,表中其余的激活导轨组同样表示了每次激活导轨的位置和数量,从而组成了对于实例中路段的控制策略。
从表4可以看出,该路段的导轨组群控制策略如下:当车辆行驶至第7段导轨时,同时激活第7~32段导轨,构成了第一次激活的导轨组,导轨33~36段处于待机状态,由超级电容为电机提供电能。当车辆行驶至第37段导轨时,同时激活第37~61段导轨,构成了第二次激活的导轨组。而后,随着车辆的移动,导轨按照表5.4中的序列激活相应的导轨,直到无线供电结束。
由表3和表4可以看出,当车辆处于加速或爬坡的行驶环境时,系统每次激活导轨的长度较长或数量较多。当车辆处于减速或下坡的行驶环境时,系统每次激活导轨的长度较短或数量较少,符合预期设想。
EV-DWPT系统中,若采用顺序逐级激活导轨或者多级导轨同时供电的方式,由无线供电系统实时提供能量。该模式下,系统年运行成本为Tope=23.206万元。相比于文中的优化结果,系统年运行成本提高了126.93 %,说明了文中模型的有效性,也表明了EV-DWPT系统导轨组群控制策略研究的必要性。
图4表示超級电容的能量变化曲线。由表2可知,q段电动自行车处于加速和爬坡的行驶环境,超级电容充放电最为频繁;b段电动自行车处于匀速行驶阶段,超级电容充放电较缓和;c段电动自行车处于加速行驶阶段,超级电容充放电较频繁;〃段电动自行车处于减速和下坡的行驶环境,超级电容充放电十分缓和;段电动自行车处于匀速和减速行驶阶段,超级电容充放电较缓和。由图4的能量变化曲线可以看出:当电动自行车处于加速或爬坡的行驶环境时,超级电容充放电较频繁;当电动自行车处于减速或下坡的行驶环境时,超级电容充放电较缓和。超级电容充放电较频繁说明了系统激活导轨的频率较快,超级电容充放电较缓和说明了系统激活导轨的频率较慢,超级电容的能量变化曲线和表4的优化结果相一致。
图5是GA和PSGA两种算法的最佳适应度曲线比较结果,从图中可以看出:迭代前期,PSGA收敛速度快,达到相同的适应度值,PSGA比GA少迭代15次以上;迭代后期,PSGA寻优的结果优于GA,表明了PSGA有较好的全局搜索性能和较高的精度。
5.3 参数敏感性分析
本文建立的控制模型中,单位长度导轨的年运行成本和单位容量超级电容成本S是容易受市场等外界因素影响的参数,会有一定的浮动变化范围。因此,本节分析了和S伽参数改变时,优化变量的变化趋势。算例分析中,路段总长度L为4600m,结合方案7中每段导轨的长度为4.09m,因此该路段需要铺设的导轨总段数为1125段。
图6为Cm”在一定范围内变化时,激活的导轨总段数和超级电容容量Cdev的变化曲线。激活的导轨总段数0表示电动自行车在一个运行周期内,开通的导轨总段数。由图6可知,当为0时,激活的导轨总段数为1125,即无线供电道路中铺设的所有导轨均参与了工作.此时,超级电容容量C为0.2F,由上文分析可知,该超级电容作为能量缓冲装置为电动自行车供电,保证导轨切换的平稳。随着^勿的增加,车辆运行周期内,0逐渐减少,而C伽逐渐增加,后期超级电容也作为能量储存装置为电动自行车供电。
图7为S伽在一定范围内变化时,激活的导轨总段数0和超级电容容量Cdev的变化曲线。在实际应用中,由于车辆空间的限制,需要对超级电容的体积一个上限值。一般超级电容的体积与容量成正比,因此本文中设置了超级电容的容量最大值为12F。当S伽为零时,超级电容容量为12F,此时,激活的导轨总段数较少。随着S伽的增加,C伽逐渐减少,而0逐渐增多。
由图6和图7可知,当和S伽在一定范围内变化时,都可以得到相应的优化结果,说明了本文建立的控制模型和采用的求解算法对于参数的变化敏感性不大。此外,图中曲线的变化趋势也说明了导轨组群控制方案的优化是一个非线性问题。
6 结束语
针对现有的EV-DWPT系统中分时供电存在的问题,本文研究了车辆运行周期内的导轨组群控制策略,在保证系统正常工作的情况下实现了系统年运行成本的最小化。本文以年运行成本的最小化为目标函数,以车载储能装置能量状态以及导轨长度等为约束条件,考虑了车辆行驶速度、道路坡度等外界客观因素,建立了导轨组群的控制模型。针对建立的模型,采用基于粒子群的混合遗传算法进行求解,得到了储能装置的最佳容量和导轨的控制方案。最后,对系统参数的敏感性进行分析。绕长距离全程EV-DWPT系统的应用场合,提出了一种导轨组群驱动模式与系统架构,并建立了系统的多目标规划模型,引入改进型自适应遗传算法进行分析,得到了较优的规划结果。
参考文献
[1] Ghahary A, Cho B H. Design of transcutaneous energy transmission system using a series resonant converter [J]. IEEE Transactions on Power Electronics, 1992, 7(2): 261-269.
[2] Green A W, Boys J T. 10 kHz inductively coupled power transfer-concept and control[C]. International Conference on Power Electronics and Variable-Speed Drives. IET,2002:694-699.
[3] 戴欣,孙跃.单轨行车新型供电方式及相关技术分析[J].重庆大学学报,2003, 26(1):50-53.
[4] 武瑛.新型无接触供电系统的研究[D].中国科学院电工研究所,2004.
[5] Lee S, Lee W, Jin H, et al. Active EMF cancellation method for I-type pickup of On-Line Electric Vehicles[C]. IEEE Applied Power Electronics Conference and Exposition,2011:1980-1983.
[6] Musavi F, Edington M, Eberle W. Wireless power transfer: A survey of EV battery charging technologies[C]. IEEE Energy Conversion Congress and Exposition,2012: 1804-1810.
[7] Wu H H, Gilchrist A, Sealy K D, et al. A High Efficiency 5kW inductive charger for EVs using dual side control [J]. IEEE Transactions on Industrial Informatics, 2012,8(3):585-595.
[8] Wang Z H, Li Y P, Sun Y, et al. Load detection model of voltage-fed inductive power transfer system[J]. IEEE Transactions on Power Electronics,2013,28(11): 5233-5243.
[9] 黄灵.用于家用电器的较大功率无线电能传输技术研究[J].科技与企业,2015(4):221.
[10] Ogihara M, Ebihara T, Mizutani K, et al. Wireless power and data transfer system for station-based autonomous underwater vehicles[C].IEEE Oceans,2016:1-5.
[11] 康乐,胡欲立,张克涵,等.水下磁谐振式无线电能传输系统的分析与设计[J].西安交通大 学学报,2015,49(10):41-47.
[12] 富一博,于汎.无线电能传输技术的发展及其水下应用趋势浅析[J].大连大学学报,2014(6):30-33.
[13] Jang Y, Jovanovic M M. A contactless electrical energy transmission system forportable-telephone battery chargers [J]. IEEE Transactions on Industrial Electronics,2003,50(3):520-527.
[14] Kim C G, Seo D H, You J S, et al. Design of a contactless battery charger for cellular phone [J]. IEEE Transactions on Industrial Electronics,2001,48(6): 1238-1247.
[15] Jiang H, Zhang J, Lan D, et al. A low-frequency versatile wireless power transfer technology for biomedical implants [J]. IEEE Transactions on Biomedical Circuits & Systems, 2013,7(4):526-535.
[16] 尹成科,徐博翎.植入式人工心臟无线电能传输研究进展[J].电工技术学报,2015, 30(19):103-109.
