半角7°圆锥马赫数6边界层转捩的自由飞实验
2020-01-10王宗浩石安华廖东骏
王宗浩, 黄 洁, 石安华, 宋 强, 廖东骏, 柳 森
(中国空气动力研究与发展中心 超高速空气动力研究所, 四川 绵阳 621000)
0 引 言
边界层转捩一直是空气动力学理论和实验研究的热点,这源于边界层结构在广泛多样的气动问题中的重要作用。在高超声速飞行器设计领域,边界层转捩研究有助于解决热防护、减阻、超燃冲压发动机工作稳定性和推进效率等问题[1]。
飞行实验可以获得真实飞行数据,但其复杂度高、实验周期长、经费消耗大。弹道靶通过发射器加速模型,使其以超高速状态在测试段内自由飞行,不存在支架或背景噪声干扰,可模拟真实的飞行速度、雷诺数以及高焓的飞行环境,用于研究高超声速边界层流动现象有着独特的优势。
美国自20世纪60年代起开始通过弹道靶实验研究超声速和高超声速边界层转捩现象和规律。NASA Ames中心在弹道靶上开展了尾翼稳定细长锥柱模型实验(飞行马赫数2.8~7.0,模型表面粗糙度2.54~5.33μm),结果表明:转捩雷诺数随马赫数的增大而增大;在相同的马赫数下,一定的表面粗糙度对边界层转捩有推迟作用[2- 3]。AEDC在弹道靶上开展了半角10°锥模型、马赫数Ma=2.2和5.1的实验,证实转捩雷诺数随单位雷诺数的增大而增大[4]。
美国海军军械实验室(现改称海军水面武器中心)开展了一系列弹道靶锥模型边界层转捩实验[5- 6],发展了综合尾迹和阻力系数确定转捩位置的方法以及可显示边界层流动的阴影照相技术,研究发现边界层的稳定性对模型热导率十分敏感,壁面冷却时存在转捩逆转现象。
2000年以来,NASA Ames中心的Reda等采用ICCD相机发展了弹道靶模型表面辐射温度测量技术,开展了预烧蚀石墨球头模型[7- 8]、CO2环境下的带孤立粗糙元的钛金属球头模型[9]、带分布粗糙度的钛金属和不锈钢钝锥模型[10- 12]的转捩测量,研究了转捩对气动热和烧蚀的影响。鉴于地面高超声速风洞实验的不确定性和飞行实验的高成本,AEDC在2016年重启弹道靶转捩实验,开展了半角7°和8°锥模型、Ma=10的转捩测量,获得了阴影和辐射温度图像[13]。
近年来,中国空气动力研究与发展中心(CARDC)超高速空气动力研究所在气动物理靶上开展了锥柱裙模型[14]和半角5°圆锥模型[15]的边界层转捩自由飞实验,采用激光阴影成像技术得到了速度约2km/s的模型在不同雷诺数和迎角条件下的边界层转捩图像。在此基础上,研究了高超声速条件下迎角、球头半径等因素对半角7°圆锥边界层转捩的影响,并首次将红外辐射成像技术用于弹道靶转捩测量实验,研究结果可为相关理论和预测方法研究提供参考。
1 实验方法
1.1 实验原理
实验在气动物理靶[16]上进行。气动物理靶主要由发射系统、靶室系统和测试系统构成,如图1所示。其中发射系统为50mm口径二级轻气炮,通过调整装填参数控制模型发射速度;通过调节靶室系统的真空度模拟飞行高度;测试系统用于获得模型飞行速度、姿态、边界层流场图像、表面辐射温度图像等数据。

图1 CARDC气动物理靶示意图
1.2 模型设计
半角7°圆锥模型采用7075铝合金一体成型;底径33mm,球头半径0.27~2.50mm,模型长度116.4~132.6mm;表面作氧化发黑处理或涂覆低热导率涂层,后者表面粗糙度略高。2种表面处理的模型及弹托实物如图2、3所示。

图2 发黑铝合金模型与弹托

图3 涂覆低热导率涂层的模型及弹托
实验时,模型由弹托包覆并装填于发射管中,在高压气体驱动下加速并飞入靶室,随后弹托在气动力作用下与模型分离,测试系统自动探测模型位置并触发相关测量设备。
1.3 测试方法
靶室由两段直径2m、长度分别为12和5m的圆柱形密闭容器连接而成,其侧面有多个测试窗口,分别布置阴影成像[17]、前光照相和红外辐射成像设备,如图4所示。其中阴影成像系统采用10ns脉冲激光作为光源,有效视场约200mm,分辨率26.8pixel/mm,可获得模型轮廓线上的边界层图像;红外辐射成像系统工作波段8.0~9.6μm,分辨率1.2pixel/mm,可获得模型表面温度分布;前光照相用于监测模型变形及受损情况。

图4 弹道靶转捩实验测试系统布置方案
2 实验结果
考虑迎角、球头半径等对转捩的影响,共开展实验7次,表1列出了实验的状态参数,包括模型几何尺寸和表面粗糙度、模型速度、靶室压力、环境温度等。历次实验中,除球头半径2.50mm的模型(实验ZL09)外,其余均存在不同程度的转捩现象。基于阴影图像可以获得模型轮廓线上的边界层转捩位置[14],红外辐射温度图像可直观显示转捩阵面形貌。下面分别以实验ZL03、ZL07为例,列举部分测量结果。
图5为实验ZL03获得的模型水平方向阴影图像。实验时,成像窗口边缘悬挂有铅垂参考线,基于阴影图像中的模型尺寸和比例,利用平行光投影的几何关系可计算得到模型姿态角。实验模型俯仰角为5.0°,侧滑角为2.9°,总迎角为5.8°。由于侧滑角不为0°,阴影图像中的模型轮廓线并不对应迎/背风中心线(在阴影图像中以点划线标识)。可以看出,模型下侧边界层从距头部约50mm处开始出现湍流结构并持续至模型尾部;上侧边界层从距头部约40mm处开始出现间歇性明暗结构并在约60mm处充分发展为湍流;上侧湍流边界层厚度大于下侧。
边界层内的湍流结构与阴影图像明暗变化存在对应关系[18]。沿边界层分布的图像灰度曲线包含周期性信息,通过傅立叶变换可得到统计意义上的湍流涡空间分布频率,进一步可计算得到涡的局部平均尺度,其精度主要取决于图像分辨率。本次实验阴影图像分辨率为26.8pixel/mm,对应测量精度约为0.04mm。以5mm为间隔对模型边界层图像灰度数据进行分析,得到实验ZL03模型上、下侧轮廓线上的涡尺度分布,如图6所示。当涡尺度显著增大,则表明出现了湍流结构,可据此确定转捩位置,其精度取决于采样间隔(5mm)。模型下侧轮廓线的边界层最大湍流涡尺寸为0.80mm,上侧湍流涡尺寸的增长更为显著,最大值为1.25mm。

表1 弹道靶转捩实验状态参数表Table 1 Test conditions

图5 实验ZL03模型水平方向阴影图像(俯仰角5.0°,侧滑角2.9°)
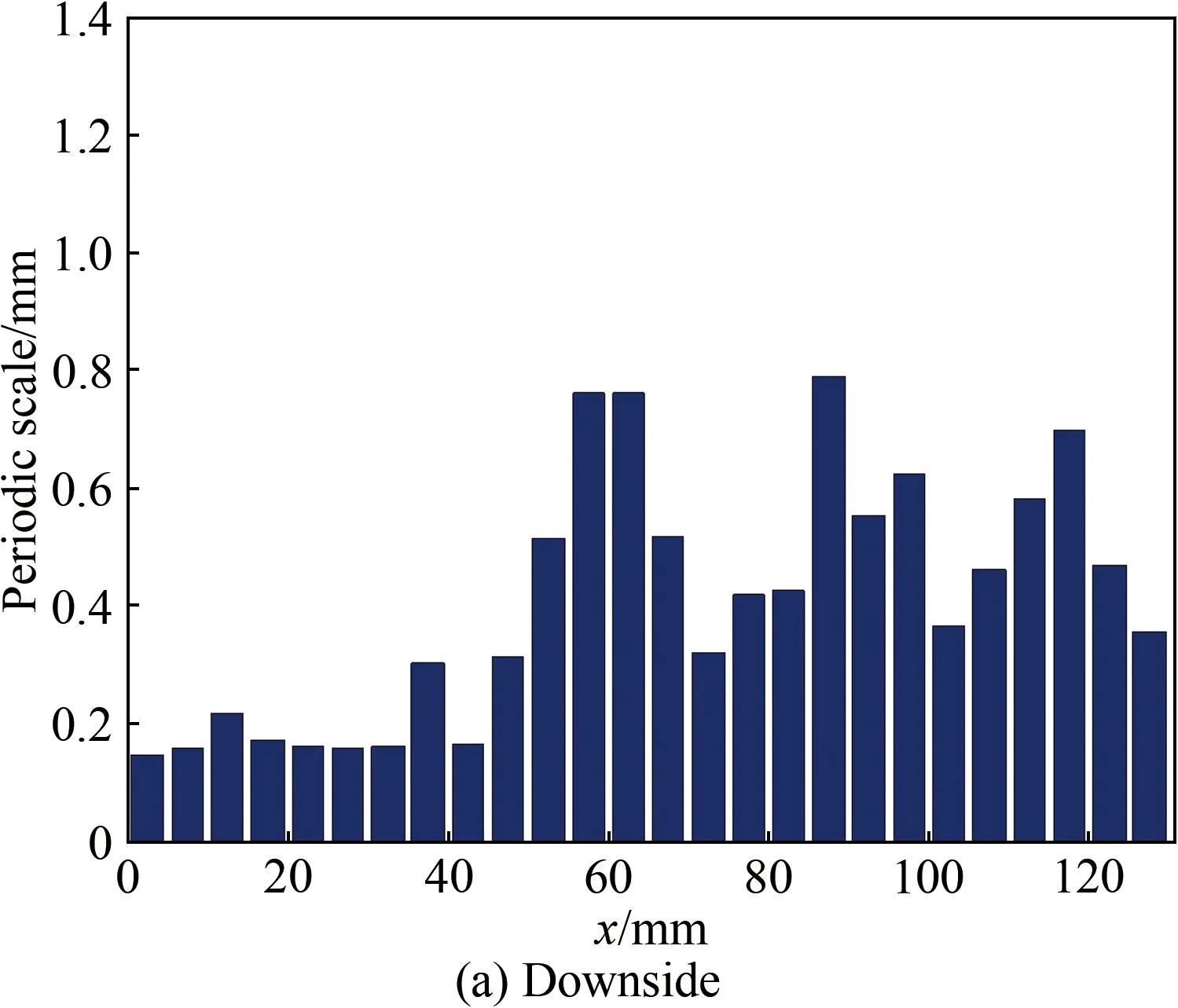

图6 实验ZL03模型阴影图像两侧轮廓线上的涡尺度分布
Fig.6PeriodicscaledistributiononbothsidesoftheshadowgraphoftestZL03
图7为红外辐射成像系统获得的实验ZL03模型水平方向辐射温度分布图像。在有限飞行距离内,铝合金模型表面的温升并不显著,介于40~80℃之间。在模型中部,可以观察到前后温度差异形成的“>”形界线,其最前点距离模型头部约48mm,与迎风侧轮廓线的交点距离模型头部约57mm,与背风侧

图7 实验ZL03模型水平方向辐射温度图像
轮廓线的交点距离模型头部约70mm。温度显著升高,表明边界层流动已进入湍流状态,因此辐射温度图像可以给出转捩结束点的分布。
在短距离内,模型飞行姿态和速度变化不大(姿态变化在测量误差范围内,速度变化在1m/s量级),可以推测边界层流态相似。对比可见,同一次实验的阴影图像和辐射温度图像测量结果相近,综合二者结果,可得到模型可见表面(模型可测量区域)的边界层转捩区大致位于距头部48~70mm的范围内。
图8为实验ZL07获得的模型水平方向阴影图像。实验模型表面为低热导率涂层,表面粗糙度均值4.78μm,模型俯仰角0.6°,侧滑角2.0°,迎角2.1°。从图中可见,模型上、下两侧轮廓线上的边界层从距头部约80mm处开始转捩,其中下侧出现了较明显的准周期结构,持续长度约25mm,单个周期长度介于1.6~2.7mm之间。
图9给出了基于水平阴影图像灰度分析得到的实验ZL07模型上、下轮廓线上的涡尺度分布。从图中可以看出两侧边界层在湍流区存在明显的涡尺寸差异,这与阴影图像中观察到的流动现象一致。结合图10给出的实验模型前光照片,可以推断四瓣弹托之间的啮合结构(齿距3mm,分布在距模型底部55mm范围内)在发射过程中对模型表面涂层产生了挤压破坏,改变了当地壁面条件,进而影响了边界层流态。

图8 实验ZL07模型水平方向阴影图像(俯仰角0.6°, 侧滑角2.0°)


图9 实验ZL07模型阴影图像两侧轮廓线上的涡尺度分布
Fig.9PeriodicscaledistributiononbothsidesoftheshadowgraphoftestZL07

图10 实验模型的前光照片
图11为红外辐射成像系统获得的实验ZL07模型水平方向辐射温度分布图像。观察可见,在模型中后部存在“M”形转捩线,分布于距头部78~88mm的范围之间。由于实验模型采用低热导率涂层,表面温升更为明显:在模型后半段,边界层进入湍流状态,局部辐射温度超过250℃,远高于层流区。
两次实验的测量结果,初步验证了阴影和辐射温度图像用于转捩测量的一致性。自由飞实验是一个模型表面持续加热的非稳态过程,目前可对比的测量结果较少,且存在发射过程中弹托挤压、叠加气体辐射等诸多影响因素,需要进一步完善实验设计和数据分析方法以确定辐射温度测量的偏差。
基于阴影图像测量的转捩结果汇总于表2,模型马赫数4.89~6.63,单位雷诺数4.8×107/m~5.2×107/m,模型迎角0.8°~5.8°,测得模型的转捩雷诺数介于2.4×106~5.6×106之间。由于当前测量手段尚不能获得完整的圆锥模型转捩线,在实验结果普遍存在非对称转捩的情况下,表中所列转捩雷诺数范围将小于真实范围,但多次实验的统计结果仍然具有代表性。

图11 实验ZL07模型水平方向辐射温度图像
实验ZL05和ZL08状态接近,以ZL05为基准,二者迎风侧转捩雷诺数相差4.2%,但背风侧转捩雷诺数相差41.8%。这是因为小角度锥转捩的非对称性受迎角影响大,随着迎角变化,背风侧转捩位置的变化范围明显大于迎风侧,而这两次试验模型侧滑角不同,阴影图像轮廓线对应锥面上的位置有别,导致了测量结果差异。ZL05模型侧滑角为0°,水平阴影图像中的模型轮廓线刚好对应迎/背风中心线,因此测得的背风侧转捩位置靠前,转捩雷诺数较小;ZL08模型侧滑角为1.7°,阴影图像中的模型轮廓线偏离迎/背风中心线,因此测得的背风侧转捩雷诺数较大。
图12对比了不同迎角下模型迎、背风侧转捩雷诺数。其中,实验ZL03、ZL04和ZL10球头半径相近,球头雷诺数介于4.43×104~4.66×104之间,模型迎角分别为5.8°、0.8°和4.9°,对比可以看出存在转捩雷诺数随迎角增大而减小的趋势。

图12 不同迎角下模型迎、背风侧转捩雷诺数对比
Fig.12TransitionReynoldsnumbercomparisonunderdifferentconditions
目前,国内外关于圆锥在高超声速条件下转捩的迎角效应实验和理论研究结论大多为:小迎角时,小钝度圆锥背风面转捩位置向前移动,迎风面转捩位置向后移动,但对大钝头圆锥迎角的影响相反[19]。从本文辐射温度测量结果可以看出,迎角不仅会引起转捩位置的非对称移动,还会导致转捩线形貌的复杂变化。这可能与迎、背风面最不稳定波的频率差异导致第二模态失稳被抑制或促进有关[20]。测量边界层内不稳定波的增长率有助于理解其内在机制,但针对高超声速边界层的稳定性实验设计目前仍面临挑战。另外,圆锥边界层转捩的迎角效应,会产生俯仰面内附加的横向力和力矩,导致飞行不稳定,未来可结合模型气动力特性测量来研究转捩的影响问题。
实验ZL09模型球头半径2.5mm(球头雷诺数2.55×105),在有限长度内未出现转捩,可见一定的球头钝度可以推迟转捩。从理论上讲,可能是因为锥体头部钝化后,脱体激波引起的总压损失增加、气流速度降低造成局部雷诺数下降。Bountin等在实验中详细测量了马赫数为6的零迎角钝锥边界层的扰动波的增长情况,还引入了可控扰动来激发第一模态和第二模态不稳定波,结果发现钝头有推迟第二模态扰动导致的转捩的作用[21]。从稳定性角度分析,适当增大小钝度圆锥的钝度时,失稳临界雷诺数将提高,转捩位置后移。而当钝度进一步增加至一定程度,锥头的感受性、锥头表面的粗糙度等因素变得重要,使得边界层流动中的初始扰动增加,反而导致转捩雷诺数变小,转捩位置前移。本文实验未发现钝度引起的转捩反转现象,后续将进一步补充实验验证。
此外,ZL07和ZL10两次实验的模型采用低热导率涂层,模型表面粗糙度和表面温度均高于其他实验,受限于实验次数,其影响暂无法准确判断。
3 结 论
在气动物理靶上开展了半角7°圆锥的边界层转捩测量实验,采用阴影和红外辐射成像分别获得了模型边界层图像和转捩阵面。实验中,模型底径33mm,球头半径0.27~2.50mm,马赫数4.89~6.63,单位雷诺数4.8×107/m~5.2×107/m,迎角0.8°~5.8°,测得转捩雷诺数介于2.4×106~5.6×106之间。结果表明:转捩雷诺数随迎角增大而减小;一定的球头钝化可以推迟转捩。
当前的弹道靶转捩测量技术仍存在不足,一是激光阴影成像方法受光源相干性影响,图像背景散斑密度较大,制约了成像品质;二是辐射成像测量技术在模型表面材料选择、系统标定以及热流计算方法等方面还亟需完善。
致谢:本文实验研究工作得到了陈鲲、龙耀、邹胜宇、柯发伟、李鑫、姜林、刘培、廖富强等人的协助,低热导率涂层由上海交通大学彭迪提供,在此表示衷心感谢。
