全地形农药喷洒系统的设计
2020-01-07李杰曾实现李新瑞李亮亮贾昊林刘以强
李杰 曾实现 李新瑞 李亮亮 贾昊林 刘以强

【摘 要】本设计为用于不同地形的农药喷洒。该装置由履带爬坡底盘、农药喷洒传动系统、外部环境检测系统、太阳能供电系统、无线遥控控制系统、可视化图像系统组成。其包括:基于STM32单片机的硬件主控电路:多角度农药喷洒装置:具有一定压力的工作介质水,通过喷嘴向吸入室高速喷出,通过水泵和喷头的配合高速流出。环境检测功能:通过传感器对外部环境的检测,例如:温度、风速、空气湿度等等;Wi-Fi摄像头,固定在车架,保证喷洒途中图像实时传输,底盘履带配合大功率直流减速电机便于装置的行进;采用串口智能电容屏,实时显示装置内药量情况。太阳能供电系统:采用太阳能供电和蓄电池供电的多种方式,避免装置正常工作时发生电量等问题。
【关键词】STM32单片机;环境检测;Wi-Fi摄像头;履带爬坡底盘;太阳能供电;
引言
每年我国都有100万t农药制剂、1亿t药液喷洒农田中,但我国在农药使用的技术理论和技术措施个研究严重不足。人们一直认为农药使用只是简单的称量、配制的药物学问题,农药使用技术仍停留在大青、大雾滴喷雾技术水平上。概括起来,现阶段我国大多数地区对农药的使用存在以下认识上的误区:1.不重视农药使用技术的研究;2.农药使用者缺乏安全意识;3.靶标针对性差;4.普遍采用大容量喷雾技术。目前国内针对于复杂地形主要用于小型背负式喷雾器目前在我国占绝对地位。国产的小型人力喷雾器存在的主要问题是,喷嘴型号不全,机器加工质量不高,费时费力,消耗极大的劳动力,并存在一定的危险性。
1硬件系统设计
根据全地形小车运行要求和功能需要采用STM32单片机控制。STM32单片机具有非常高的内部集成度,体积小的特点,同时单片机具有较强的可靠性和稳定丰富的控制功能,目前市面上STM32单片机用于生产便携式产品,可以通过外部引脚进行功能拓展功能、性价比极高。控制系统结构框图见图1。
1.1单片机选型
本设计选用STM32F103RCT6芯片作为控制处理器,STM32F103RCT6单片机拥有72MHz运行频率,工作速度快,效率高;片内具有256KB FLASH,片上集成12Bit A/D、D/A、PWM、CAN、USB、SDIO、FSMC等资源,具有支持定时器、ADC,DAC,SPI,IIC和UART的12通道的DMA控制器,控制芯片的系列不同,拥有不同数量的输入输出端口,使用者可以根据自己的需求来自行配置IO的输入输出模式。STM32可以支持外接3.3V電源供电,或USB供电。
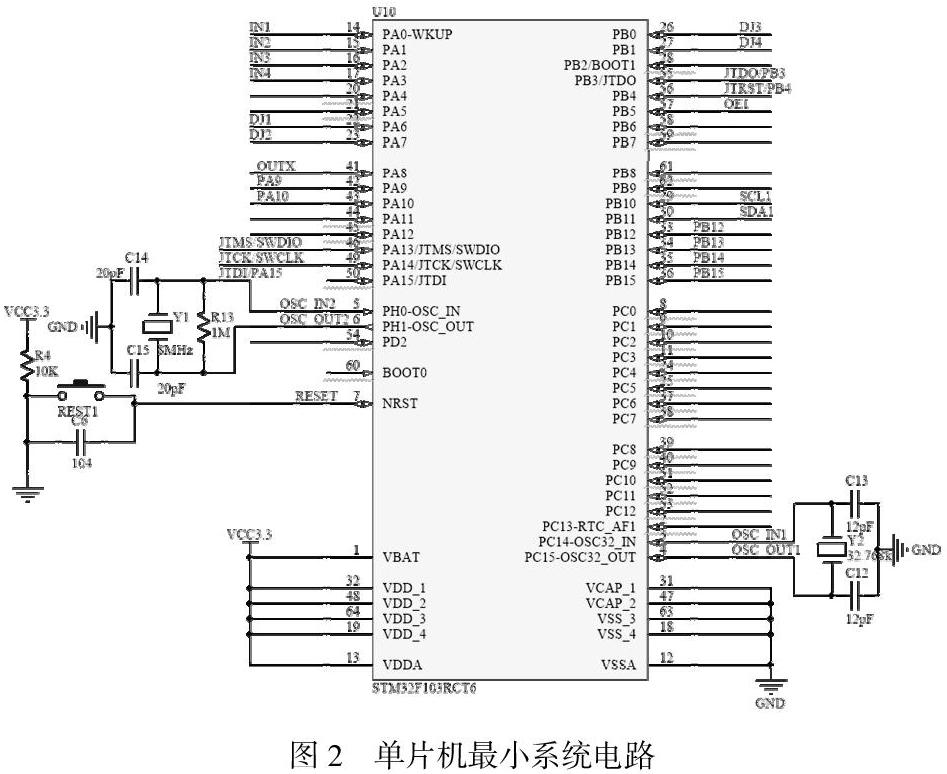
1.2单片机最小系统设计
为了保证单片机可以正常工作,需要在其周围构建硬件电路,由STM32F103RCT6芯片、复位电路和晶振电路组成。在单片机7引脚NRST上接一个104 的电容和复位开关到地,便可构成上电复位的电路。单片机5引脚、6引脚为晶振电路的接口。单片机最小系统电路见图2。
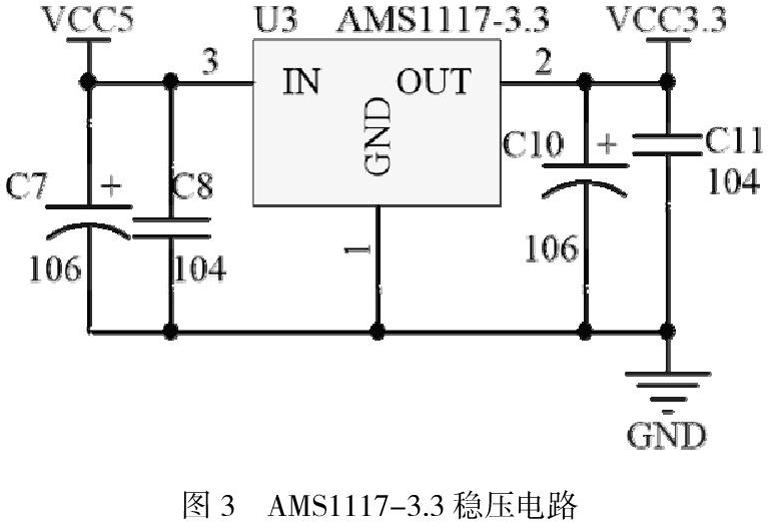
1.3 3.3V稳压电路设计
系统正常工作需要用稳定3.3V的电源给单片机提供工作电压,首选AMS1117-3.3芯片为STM32单片机供电。由于主控芯片较为脆弱,AMS1117-3.3芯片内部集成过热保护和限流保护电路。AMS1117-3.3稳压电路见图3。为了减少输入电压波纹振荡,C28、C29在电路中起到电源输入滤波的作用,C26、C27在电路中起到输出滤波的作用,为了保证该电路的稳定性。
1.4 电机调速电路
对于电机的调速,我们采用程序编写进行PWM调速的方法。
PWM调速的原理是通过控制在一个周期内输出高电平的时间大小,从而实现电机转动的速度。通过改变输出占空比,改变装置的运行速度。
装置底盘驱动系统共用了4个电机,为控制电机达到合适的运行速度,设计电机驱动电路,电机驱动芯片的型号为L298N。L298N是一个全双桥式的驱动芯片,内部包括两个H桥和4通道逻辑驱动电路,可以接收来自单片机的标准TTL逻辑电平信号。
对于电机的调速,这里采用PWM调速的方法。在硬件电路的连接上,将NPUT1、INOUT2、INPUT3、INOUT4分别接在单片机的I/O口上,通过控制I/O口输出高低电平的变化改变装置运行方向,通过改变输出占空比,改变装置的运行速度。L298N桥式电机驱动电路配合PWM,很容易实现电机调速,且调速范围广,所以在这里采用L298N驱动芯片完全满足工作要求,电机驱动电路图见图4。
2.技术路线及可行性分析
全地形底盘设计采用多结构履带设计,底盘履带配合大功率直流减速电机便于装置的行进,保证在各类地形正常工作;多角度农药喷洒装置:具有一定压力的工作介质水,通过喷嘴向吸入室高速喷出,通过水泵和喷头的配合高速流出。环境检测功能:通过传感器对外部环境的检测,例如:温度、风速、空气湿度等等;采用串口智能电容屏,实时显示装置内药量情况;太阳能供电系统:采用太阳能供电和蓄电池供电的多种方式,避免装置正常工作时发生电量等问题。采用基于无线传输的全色彩摄像头,可360°旋转,同时具有发声功能。
2.1底盘驱动选型
针对机器人需要环境复杂的现场进行作业,为此考虑了三种底盘驱动方案,并对它们的优缺点进行了比较。
(1)轮式底盘驱动虽然在行走速度方面有优势,但是不适用于越障环境下的小型机器人;(2)全向轮底盘驱动虽然在横向移动和转向方面表现出色,但是无法搭载过多的消防救援设备,同时也无法面对楼梯等特殊地形。(3)在各种路面都有较好的运动能力在综合比较,履带式具有显著的优点,适用环境能力强,越障性能好,所以履带式机构在消防机器人上选择优于其他几种结构。
根据三种方案的特点,考虑装置的工作环境和要求,采用履带式底盘驱动更优,且完全满足工作需要,底盘结构见图5。
2.2检测方案
采用遥控器遥控方式。无线遥控结合摄像头的实时图像传输,这种方式操作简单,对农药喷洒环境能够做到较全面的了解,不需要程序控制,稳定性较高。
2.3太阳能自动追光系统测试
在考虑单一方向一块太阳能综合利用率较低的情况下,采用了多块太阳能板结合锂电池一起为整个系统供电。通过四个光敏电阻来配合实现最终的角度计算,从而实现最大程度的利用太阳光能。
3.结论
在农业领域中,目前多采用无人机喷洒,但利用旋翼无人机喷洒农药具有作业精度高、操作系数高、存在安全隐患等问题。本次设计针对农药喷洒效率问题,提出了新的解决方案,结合各种复杂的地形情况,设计了全地形农药喷洒系统,改进了山区、林园的农药喷洒过程,降低成本,可实现自动和遥控两种工作模式,减少人力,节约资源。
参考文献:
[1]易建贵.我国植保无人机的应用前景[J].广西农业机械化,2016,38(2):22-23.
[2]陆碧秀,莫新媛.植保无人机水稻田间农药喷施的作业效果研究[J].农业工程技术,2020,40(15):40-42.
[3]郑炳祥,许奕.植保无人机技术推广的优势与难点[J].现代农机,2019(06):26-27.
[4]史锋.一种线上行走农药喷洒机设计及分析[J].南方农机,2019,50(21):57-58.
[5]林锐,池庆,李秋怡,高永民.基于STM32的远程控制植保无人机[J].福建农机,2019(03):22-26.
[6]陈广大,郭小磊,刘德君,李金剑,由淋元.无人机梯田施药路径规划设计[J].中国农机化学报,2019,40(08):171-175.
[7]王宜全,吴扬东,祁兵.基于Faster RCNN的间作类农田无人机喷雾方法研究[J].中国农机化学报,2019,40(06):76-81.
作者简介:
李杰(1998-),男山东济南人,学士,研究方向:控制工程。
曾实现(1979-),男,山东省嘉祥人,硕士,副教授,研究方向:控制工程。
李新瑞(1996-)山東枣庄人,学士,研究方向:财务管理。
李亮亮(1998-),男,山东省日照市人,学士,研究方向:控制工程。
贾昊林(1998-2020),男,山东省烟台人,学士,研究方向:控制工程。
刘以强 1998.3.18,男,山东省聊城人,学士,研究方向:控制工程。
基金项目:
该项目由国家级创新创业训练项目《多功能铁屑回收车》(S202013320025)支持
(作者单位:青岛黄海学院)
