基于STEM教育的双足行走机器人制作应用研究
2020-01-07杨亭田世锋李辉辉
杨亭 田世锋 李辉辉

《国家中长期教育改革和发展规划纲要(2010-2020年)》强调提高学生勇于探索的创新精神和善于解决问题的实践能力。如今机器人技术已广泛渗透到人们生活、学习等各领域。机器人智能技术能够通过解决实际问题激发学生对于计算机学科、科学、技术、工程设计和数学的兴趣,是培养学生的创新思维、科学品质、探索精神、实践能力为目标的学科。随着互联网和信息技术的飞速发展,数字技术与教育不断融合,学生的培养从应试能力向立足于学生全面发展的综合素质培养转变是教育发展的趋势。
机器人取代劳动力已经成为必然,人才培养市场的竞争催生了教育机器人的快速发展。国内外一些企业纷纷生产教育机器人或教学平台,如SmartCar、SUUNY618、博思威科教育机器人等均已投入市场。但以企业牵头推动发展教育机器人产业,大多自成体系,标准不统一,商业化严重,开放度低。机器人教学的“教材”属于“产品说明书”或“用户指南”式的居多,缺少课程与教育教学专家的参与和指导,而基于STEM教育的双足行走机器人制作应用研究是各学科工程技术人员创意的交流融合、多学科知识的跨界整合,对培养学生的探索能力、协作能力和创新能力具有促进作用,因此,进行基于STEM教育的双足行走机器人制作应用研究以适应中职学生的“做学结合”学习特点来推广控制机器人的相关技术应用,提高学生的培育质量就很有必要。
在国外,机器人教育一直是个热点,早在1994年麻省理工学院(MIT)就设立了“设计和建造 LEGO 机器人”课程(Martin),目的是提高工程设计专业学生的设计和创造能力,尝试机器人教育与理科实验的整合;麻省理工学院媒体实验室“终身幼儿园”项目小组开发了各种教学工具,通过与著名积木玩具商乐高公司的紧密合作,该项目组开发出可编程的乐高玩具,帮孩子们学会在数字时代怎样进行设计活动。
国内也已有一些企业和公司可以生产教育机器人或教学平台。如北京水木寰虹教育公司的i奇机器人,有着自己独创的易学编译平台,并将机器人教育理念深入到小学、中学、大学各个层次。
教育机器人虽然已经有了不少,但是对于广大的机器人爱好者来说,这并不是他们的首选。他们喜欢自己选择零件,自己设计电路板,自己编写程序,从头到尾自己设计出一套机器人来。
一、研究内容及方法
1.研究内容
首先,基于STEM模式的跨界双足行走机器人的设计研制,包括人文艺術元素的模型设计、模具制作、外壳3D打印成型,金属连接件制作,控制电路板的设计制作,各类电机、舵机、传感器、控制器的原理应用、安装调试,针对中职学生特点的可视图形化编程软件的开发调试,过程成本的核算控制等。
其次,科学规划适合中职学生学习训练的机器人教学方法,开展职业学校学生创新教育研究。
(1)规范中职学生工程技术能力。机器人是一门综合交叉的学科,涉及机械、3D打印、人工智能、电子、运动学、传感检测、计算机技术等学科,是激发中职学生动手学习的有效方法。同时机器人结构设计很好地体现了工程的标准化及规范化。在机器人制作中,指导中职学生学习使用标准化组件和芯片;训练优化算法;理解机器人的工作方式,解除学生对机器人的神秘感,激发其创新能力,为他们提供“用知识”的机会,努力将他们的奇思妙想激发出来。
(2)培养学生团队意识,增强其协作精神。当今社会大环境要求学生具备较强的合作能力。现在中职学生大多自觉自律不足,团队合作意识欠缺,机器人制作涉及的知识面很广泛,不可能一个人独立完成所有任务,需要多人协作。教师应教会中职学生在协作中相互探索,将有用的信息和其他成员共享,让学生在实践中去感受,学会容忍伙伴的缺点与不足,去体验团结协作的力量。
第三,研究培养一支适合未来教育教学的STEM教学应用型和创新型人才队伍,以适合职业技术教育中STEM课程的顺利开发和开展。
2.研究方法
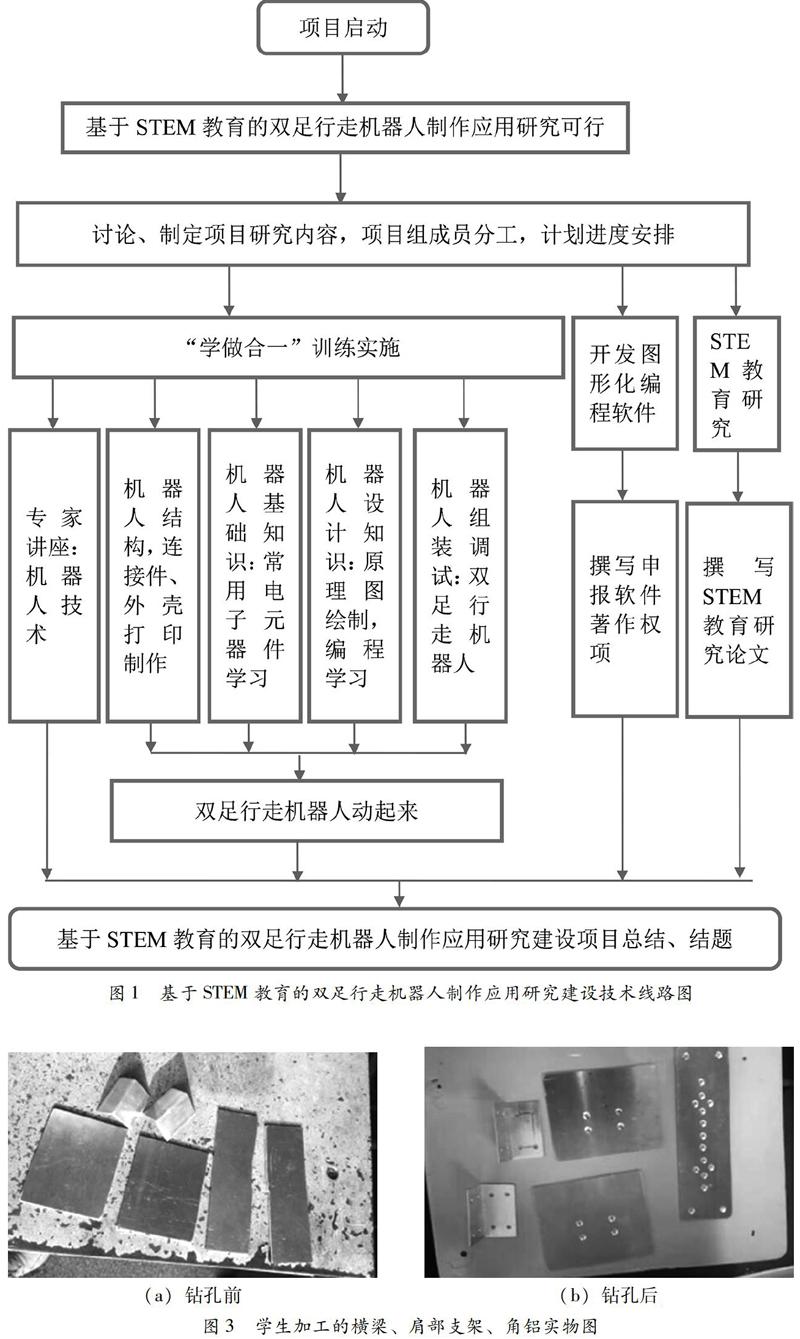
依据STEM教育实践课题建设研究总项目及基于STEM教育的双足行走机器人制作应用研究子项目的研究思路,制定该子项目建设技术路线,如图1所示。
二、制作双足行走机器人的STEM教育
1.硬件设计
(1)腿部
机器人的双腿可由舵机和若干支架连接而成,如图2所示。教师引导各个小组学生参考人类腿部特征,每个可活动关节处应该配置一个舵机。接下来,让各个小组进行讨论,设计并组装机器人腿部。允许学生根据自身需要来设计腿部的高度、关节个数、关节的可活动范围等,从而组装出不同的机器人腿部。
(2)躯干
教师先组织学生讨论如何将机器人两条独立的腿有机地结合起来。躯干部分主要由横梁、肩部支架和角铝等元件构成,这些元件可根据自身需要进行不同尺寸和形状的裁剪。与此同时,教师要组织学生探索机器人两条腿之间的距离应该多大最为合适。再组织学生讨论如何将所需的元件加工出来。如图3所示,是学生使用钳工设备、钻孔机等加工出来的横梁、肩部支架、角铝。
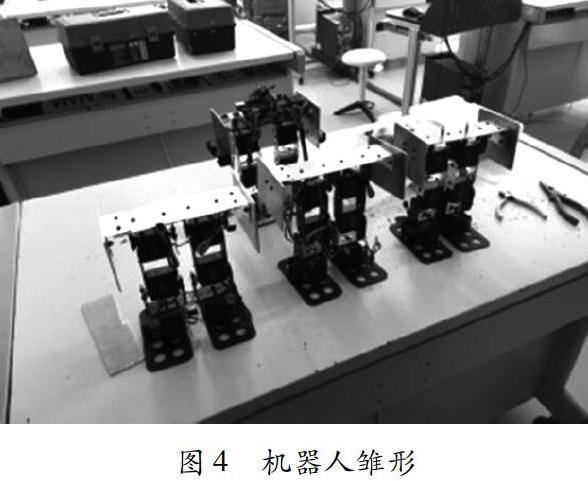
接下来,教师则组织学生进行机器人躯干部分的组装。如图4所示,机器人的雏形初步形成。
(3)电路板
教师引导学生认识电路板的作用:一方面解决机器人舵机、单片机、传感器等用电器的供电问题;另一方面确保舵机与单片机之间的通信顺畅。电路板制作主要包括三方面的内容:设计电路原理图,焊接实际电路,将电路板安装到机器人上去。为获得最佳电路,在制作电路时,教师组织学生进行充分的讨论。如图5所示,是学生制作出来的双足行走机器人的最终效果图。
2.软件编程及其调试
教师先引导学生探索人类在步行走路时各关节的动作分解,必要时可以让学生亲自走几步来对走路原理进行探究。让学生认识到人类走路其实是各个关节之间先后转动,并且连贯地组合在一起而成的。再组织学生通过C语言编程,让单片机控制各个舵机的协同转动,从而让机器人模仿人的动作步行走路。
在调试过程中,机器人在双足行走时可能并不顺畅,甚至容易摔倒。此时,教师组织学生探索影响机器人正常走路的因素,并探索相应的解决办法,从而改进机器人步行走路的稳定性能。
3.后续完善
当机器人可以模仿人类走路以后,教师则组织学生讨论和探索如何赋予机器人更多“人”的元素。例如,运用3D打印技术给机器人上裸露的电路板和舵机支架安装外罩,使其看起来更像一个人,再给机器人安装传感器,使其可以感知周围的环境。
4.实验结果
(1)该研究组织4组学生进行双足行走机器人的制作,每组3~5个中职学生,有一年级的学生,也有二年级的学生。其中有3组学生完成机器人的制作,并且能让机器人较为平稳地模仿人类的动作步行走路。剩余一组未能完成制作的学生因为中途参加实习而耽误了部分课程,并且均是来自一年级的学生,他们还没有完成电路设计和软件编程等课程系统学习。
(2)每组学生在制作机器人的过程中,能够积极沟通,一起查找资料解决问题。同时,组员之间也能做到分工合作,优势互补,确保项目顺利完成。
(3)教师主要是起到引导和把控局面的作用,课堂的真正主角是学生。
三、结束语
(1)该研究着重点在于通过制作双足行走机器人,来研究适合中职学生的STEM教育。
(2)该研究学生在制作机器人的过程中,能够做到各抒己见,极大地发挥自己的想象力和创造力,积极为团队贡献力量。同时,在机器人的制作过程中学生能较好地结合机械、电气、人文艺术、3D打印等学科知识,充分体现了STEM教育跨学科的特点。
(3)该研究能较好地形成基于STEM教育的双足行走机器人研究制作开发教学平台,该教学平台可应用于中职学生职业教育。
(4)通过该研究能够培养出2~3名适合未来教育教学的STEM教学应用型和创新型人才。虽然在课堂上教师的角色有所淡化,但是每节课都是经过多位教师集体备课、精心准备的结晶。
[基金项目:该研究为广东省教育科学规划课题“学校STEM课程建设研究”(课题批准号2019YQJK580)成果。]
责任编辑 陈春阳
