一种大时滞过程的控制方法
2020-01-03尤朋飞
魏 尧, 张 珊, 尤朋飞
(1.燕山大学 电气工程学院, 河北 秦皇岛 066004;2.国网北京市电力公司, 北京 100089)
0 引 言
分数阶(fractional order, FO)控制器近年来在各种过程控制领域中得到了广泛应用,比如分数阶伺服控制系统、智能PID温度控制算法等。但在控制系统中,积分环节、数字系统的采样和计算等因素都会引发较大的时滞,致使系统控制部分无法对扰动做出及时响应,进而影响系统的性能,不能满足工业中日益提高的产品加工工艺要求和设备精度要求。预测控制等方案为解决时滞问题提供了方法,但实现复杂[1]。因此,引入预估控制器仍不失为解决这类问题的一种较为简单有效的方案。
最经典的分数阶控制器为PIλDμ控制器,相较于整数阶PID控制器,其引入了积分阶次λ和微分阶次μ,扩展了参数选择范围[3];文献[4]将Smith预估控制器与模糊自整定PID算法相结合,实现了PID参数的自调节,并在时滞系统中获得了稳定性能;文献[5]将Smith预估控制器引入至内模控制(Internal Model Control, IMC)器中,实现了基于内模控制的二自由度(2 degree of freedom, 2DOF)Smith预估控制器,使系统的跟随性与抗扰性能解耦,并且也能够对含小时滞的过程进行控制;文献[6-7]提出将分数阶(PID)γ控制器引入至内模控制器中,实现了分数阶控制器控制整数阶系统,但是在有扰动时会产生一定程度的静差;文献[8]将分数阶PIλ控制器与Smith预估控制器结合,实现对1阶时滞过程的控制。
文中针对常见的1阶和2阶含大时滞过程,基于分数阶控制器,首先推导出一种分数阶(PD)γSmith预估控制器;之后改进为一种半分数阶二自由度Smith预估控制器;最后通过系统的性能指标选定控制器参数后,通过仿真验证该方法对1阶和2阶含大时滞过程的有效控制。
1 分数阶(PD)γ控制器及Smith预估控制器
1.1 分数阶内模控制器
分数阶(PID)γ控制器传递函数为
(1)
分数阶(PD)γ控制器即为式(1)中参数Ki=0时形式。内模控制结构如图1所示。

图1 内模控制结构
其中Q(s)为内模控制器,Gp(s)为被控过程,Gm(s)为过程模型,r(s)、y(s)和d(s)分别为系统的给定输入、输出和扰动信号。
当系统模型精确时,过程模型Gm(s)与被控过程Gp(s)相等,并且过程模型Gm(s)可逆。
内模控制器Q(s)可分为低通滤波部分F(s)和被控过程数学模型中不含滞后环节的最小相位稳定部分Gm0(s)的逆,即

(2)
令低通滤波部分F(s)表达式为

(3)
式中:η——滤波器时间常数;
γ——分数阶阶数,1<γ<2。
从而将分数阶控制器引入内模控制中。
1阶和2阶含大时滞过程传递函数分别为:

(4)

(5)
所对应的最小相位部分分别为:

(6)

(7)
将式(4)、式(5)和式(3)分别代入式(2)中,可求得内模控制器Q(s)形式分别为:

(8)

(9)
1.2 Smith预估控制器
Smith预估控制器结构如图2所示。
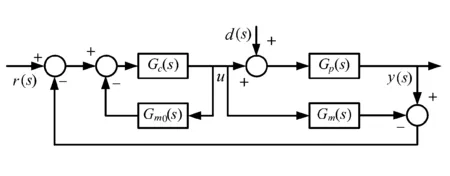
图2 Smith预估控制器结构
其中Gc(s)为控制器,其余部分含义与内模控制相同。
在被控过程数学模型Gm(s)精确时,给定输入r(s)和干扰信号d(s)至输出y(s)的闭环传递函数分别为:
(10)

(11)
式中:A=(Gm0(s)-Gm(s))。
由图2可以看出,特征方程中的滞后环节被消除,进而设计控制器时无需考虑该部分。
2 分数阶(PD)γ Smith预估控制器
2.1 常规分数阶(PD)γ Smith预估控制器
将分数阶(PD)γ控制器的形式引入至Smith预估控制器中。对于控制器Gc(s)的设计,可参考大林算法的思想,将系统的闭环传递函数式(10)设定为如下较为稳定的形式

(12)
将式(4)、式(6)和式(5)、式(7)分别代入式(10)中,可得:

(13)

(14)
从式(13)和式(14)可以看出,该控制器可调参数少,实现较为容易。
2.2 半分数阶二自由度(PD)γ Smith预估控制器
通过分析文献[3]中分数阶控制器控制整数阶被控对象的结果发现,分数阶控制器在抑制扰动时会导致系统的性能下降,产生一定程度的静差。二自由度控制的寓意是将系统的跟随性能与抗扰性能进行解耦,使用两个控制器对两种性能分别进行控制。因此,在二自由度控制中,将跟随控制器使用分数阶,而干扰抑制控制器使用整数阶来控制整数阶对象是一种较为可行的思路,可将其称为半分数阶二自由度控制。
二自由度Smith预估控制器结构如图3所示。

图3 二自由度Smith预估控制器结构
当模型精确时,有:

(15)
Gyd(s)=[1-Gm(s)Gc2(s)]Gp(s),
(16)
由上式可看出,系统跟随性和抗扰性实现了解耦,跟随性仅和跟随控制器Gc1(s)有关,抗扰性仅和干扰抑制控制器Gc2(s)有关。
采用分数阶(PD)γ控制器的形式设计跟随控制器Gc1(s),根据系统的跟随性能传递函数式(15)同样设计为式(12)的稳定形式。由于二自由度Smith预估控制器与Smith预估控制器的跟随性表达式相同,可求得半分数阶二自由度Smith预估控制器跟随控制器Gc1(s)的传递函数也为式(13)和式(14)。
对于干扰抑制控制器Gc2(s)的设计,采用整数阶控制器的形式。将其拆分为低通滤波部分F(s)和被控过程数学模型中不含滞后环节的最小相位稳定部分Gm0(s)的逆,即式(2)的形式,分别对1阶和2阶含大时滞过程选取低通滤波部分F(s)为:

(17)

(18)

λ——低通滤波器F(s)的时间常数;
α、α1、α2——分别为滤波器F1(s)和F2(s)函数中的中间常数。
可以通过确定中间常数实现干扰抑制控制器中零点与被控过程中惯性环节的极点对消,实现主导极点左移,提高系统的稳定性。最后可求得干扰抑制控制器Gc2(s)传递函数分别为:

(19)

(20)

2.3 分数阶(PD)γ控制器参数整定
Smith预估控制器结构使系统的特征方程中不含滞后环节,因此在设计控制器时,可不考虑系统时滞的作用,仅考虑系统的最小相位部分Gm0(s)。为了满足系统的鲁棒性,通常已知系统设计所需满足的相角裕度PM,即系统达到稳定临界状态所需附加的相角滞后量,将其用于控制器参数整定中。根据经典控制理论,开环传递函数Gop(s)的幅值和相位指标参数定义及性质,有:
PM=180°+φ(ωc),
(21)
20lg|A(ωc)|=0,
(22)
式中:ωc——系统的剪切频率。
为了使闭环系统对增益的变化有较强鲁棒性,设定剪切频率ωc附近幅频特性的斜率为0 dB/dec,即

(23)
联立式(21)~式(23)代入上述系统中可求得:

(24)

(25)
通过上述表达式可以看出,所设计系统有可调参数少且整定容易的优势。
另外,由式(10)、式(11)和式(15)、式(16)可知,闭环系统的特征方程不含有纯滞后环节,可认为这是分数阶时滞系统中迟缓型系统的一种。迟缓型系统的稳定条件是当且仅当传递函数在复数域的右半平面不含极点,特别是不含虚轴上的极点。这可以作为判断文中的系统是否稳定的一个方式。
3 仿真结果与分析
通过MATLAB/Simulink仿真软件对控制效果进行分析。选择ITAE、负调峰值和超调量为性能验证指标,对文中所提的两种典型系统进行验证。
例1 选取文献[5]中例1,即式(4)形式的1阶含大时滞系统表达式,与之进行比较

(26)
对于分数阶常规Smith预估控制器,由式(13)的分数阶控制器形式,可求得控制器

(27)
为了与文献[5]有可比性,截止频率设定为
ωc=0.02 rad/s,
相角裕度为
PM=65°,
根据式(24)和式(25)参数整定,可得:
γ=1.277 8,
η=0.006 746。
设定系统的给定输入为单位阶跃信号
r(t)=I(t),
扰动输入信号为
d(t)=-0.5(t-400)。
例1常规分数阶Smith预估控制器响应波形如图1所示。

(a) 正常情况

(b) 摄动情况图4 例1常规分数阶Smith预估控制器响应波形
两种控制器的仿真响应波形见图4(a),各项性能指标见表1。

表1 例1系统性能指标1
为了验证控制系统鲁棒性,对参数T、K和时滞h均加入50%的摄动,此时系统的响应仿真波形见图4(b)。
通过图4比较发现,文献[5]中的控制器适用于系统存在大摄动的情况,并且存在一定静差,使ITAE值持续增大。文中所设计的控制器适合在系统不存在或仅存在小摄动的情况下使用,能够提供较好的快速性,并且存在摄动时给定改变或增加扰动后仍可恢复至原有正常状态。
系统的零极点分布如图5所示。
(a) 给定输入闭环系统(b) 扰动输入闭环系统
图5 例1常规分数阶Smith预估控制器零极点分布
通过对零极点分布分析,极点位于虚轴左侧,通过零极点对消,主导极点更加远离虚轴,该系统稳定。
对于半分数阶二自由度Smith预估控制器,由式(13)和式(22),取λ=1.5,则控制器传递函数分别为:

(28)

(29)
同样按照分数阶常规Smith预估控制器选取参数,例1半分数阶二自由度Smith预估控制响应波形如图6所示。

图6 例1半分数阶二自由度Smith预估控制响应波形
系统响应仿真波形见图6中实线。
系统的各项性能指标见表2。

表2 例1系统性能指标2
同样对参数T、K和延时h加入摄动。系统给定改变或增加扰动后可以恢复至正常运行。
给定输入的零极点分布和扰动输入的零极点分布如图7所示。
通过对系统零极点分布分析,系统极点也全部位于虚轴左侧,因此该系统稳定。
例2 选取式(5)形式的2阶含大时滞系统模型

(30)
对于分数阶常规Smith预估控制器,由式(14)可知分数阶控制器

(31)
选取截止频率
ωc=9.95 rad/s,
相角裕度
PM=1.45°,
根据式(24)和式(25)进行参数整定,可得
γ=1.45,
η=0.035 7。
设定系统的输入信号为
r(t)=I(t),
扰动输入信号
d(t)=-0.5(t-50)。

(a) 给定输入闭环系统(b) 扰动输入闭环系统图7 例1半分数阶二自由度Smith预估控制器零极点分布
例2常规分数阶Smith预估控制器响应波形如图8所示。

图8 例2常规分数阶Smith预估控制器响应波形
系统响应仿真波形见图8中实线。
各项性能指标见表3。

表3 例2系统性能指标1
在参数T1、T2、K和延时h中分别加入15%、25%、32%和15%的摄动,即T1=1.15,T2=0.25,K=1.32,h=4.6s,此时系统的响应见图8中虚线。可见,存在摄动的情况下,系统给定改变或增加扰动后仍可以恢复至正常运行。
对于半分数阶二自由度Smith控制器,由式(14)和式(20),取λ=1,则控制器传递函数分别为:

(32)

(33)
式中:B=(0.22s2+1.2s+1)。
同样按照分数阶常规Smith预估控制器选取参数,例2半分数阶二自由度Smith预估控制器响应波形如图9所示。

图9 例2半分数阶二自由度Smith预估控制器响应波形
系统仿真波形见图9中实线。
系统的性能指标见表4。
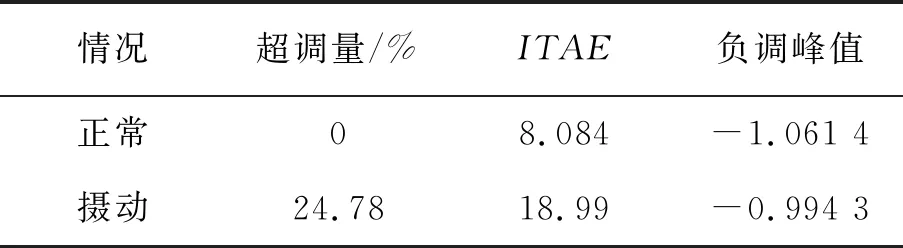
表4 例2系统性能指标2
对参数T1、T2、K和延时h添加摄动。此时系统的响应见图9中虚线,即存在摄动时系统改变给定或增加扰动后仍可以恢复至正常运行。
4 结 语
将分数阶(PD)γ控制器引入Smith预估控制器中,得到常规分数阶Smith预估控制器。将其改进为半分数阶二自由度Smith预估控制器后,实现了系统跟随性和抗扰性解耦。仿真结果表明,二者均实现了对1阶和2阶含大时滞过程的无静差控制,克服了一定程度的参数摄动,有较好的快速性,并且还有可调参数少、整定容易的优点。综上所述,两种方法均可作为分数阶控制器控制整数阶含大时滞过程的可选控制方案。
