基于Contex Capture的数字校园三维模型建设
2020-01-03陈蓉王博
陈 蓉 王 博
(1.武汉交通职业学院,湖北 武汉 430065; 2.湖北省测绘质量监督检验站,湖北 武汉 430074)
随着社会不断发展,无人机技术迅猛发展,倾斜摄影测量建立三维实景模型也流行起来,对比其他测绘产品三维模型具有直观性、客观性和真实性,三维模型可以在城市规划、地籍登记、旅游景点展示等多方面发挥很好的作用。2018年国家自然资源部正式挂牌,将推动实景三维中国建设,要在960万km2的范围完成实景三维建设,是一个重大市场。
1 倾斜摄影测量的基本原理
传统的摄影测量一般只搭载一个下视镜头以获得下视影像为目的,采用像片倾角小于3°的摄影方式,这一方式便于后续生产数字地形图、数字正射影像图等成果,但是会失去地物尤其是建筑物的立面信息[1]。与传统摄影测量不同,倾斜摄影测量镜头倾角一般都大于30°,为了更好获取地物的立面信息,往往采用低空摄影的方式,通过倾斜的单个或者多个镜头进行信息的采集,最后获得整个区域的实景三维模型。无人机的出现,以其价格低廉、起飞方便弥补了传统航空摄影测量成本高、飞行要求高等问题,同时无人机飞行高度较低可以获得更高分辨率的地面影像,有助于提高模型的精度和提升模型的纹理质量[2]。常见无人机有大疆系列M600、精灵4pro等,其搭载的传感器有专门基于大疆平台研发的镜头,比如成都锐铂和双鱼镜头,重量都不足900 g;国产测绘企业南方测绘和中海达也有自主知识产权的无人机和随机配套的云台和镜头。目前五镜头已经成为获取倾斜影像建立三维模型的主流配置,通过同一时刻拍摄的五个方向的照片,获取丰富的地物信息,不再像之前单镜头只能捕捉单一方向的照片需要多次进行飞行,能够一次性获取多种姿态数据,减少外业飞行作业时间。下文将以5镜头的无人机倾斜影像为例,通过Contex Capture软件平台,详细讲述三维模型生产过程。
2 原始数据获取与整理
建立模型的原始数据需要下视影像和其他四个倾斜角度采集的影像,航线轨迹图(.kml文件),无人机POS记录数据(pos.txt),如果仅需建立相对模型不需要绝对地理坐标,可以不需要无人机POS数据,需要注意的是五镜头获取的数据文件夹需进行改名如在每个文件前加1,2,3等,路径和存储名都要避免中文出现。在取得POS数据后需要根据飞影像姿态数据进行调整,无人机在到达拍摄场景前或为区别第几架次会拍摄几张非测区照片,直到进入摄区才进行定点拍摄并记录POS值,为了保证获取的影像与POS值一一对应,拿到数据后需要剔除未达到测区的影像数据。
以武汉交通职业学院为飞行区域,测区约1 000亩,区域内地物和地形丰富,有各种人工建筑物、道路、大面积铺装地面、湖泊、树林、山体等。本项目利用南方测绘电动多旋翼无人机——天鸿T610无人机搭载天眼T51倾斜五镜头(如图1所示)进行数据的获取,飞行平台具体参数见表1,五镜头传感器具体参数见表2。由于对同一地物获取的不同角度影像的覆盖度和重叠度越高,参与解算的照片会越多,模型可靠性更强,所以,获取实景三维建模数据时,会尽量增加飞行中影像的重叠度。但重叠度越高对于计算机硬件要求高,计算量也偏大[3,4]。此次飞行通过5个镜头分别获取458张相片,共获取影像2 290张,地面分辨率为1.5 cm,航向重叠为80%,旁向重叠为70%,飞行高度为100 m,地面控制点为7个。由Context Capture软件完成空中三角测量及三维模型的构建。
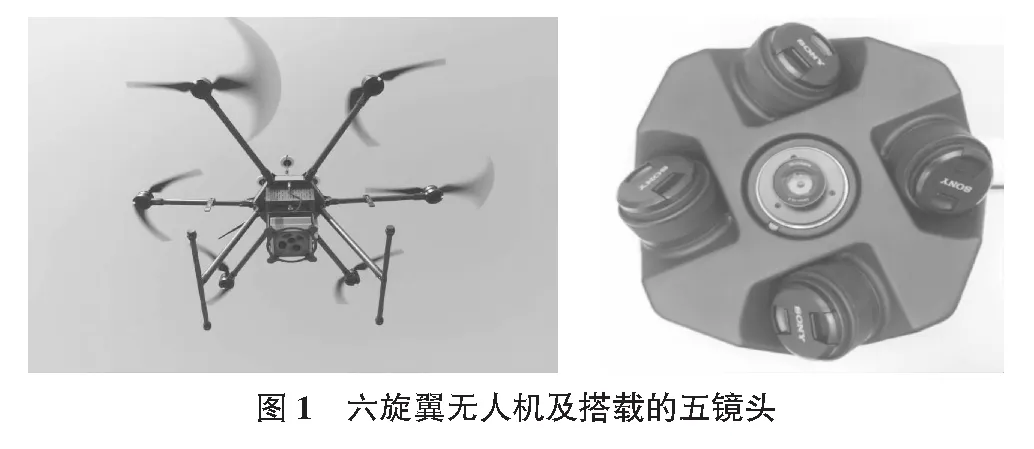
表1 无人机平台参数

参数数值轴距6轴,对称电机轴距1 210 mm飞行时间搭载五镜头50 min起降场地3 m×3 m平整场地且通视情况良好最大速度14 m/s巡航速度最佳巡航速度8 m/s,最大爬升速度4 m/s飞控三飞控,三冗余系统,三重保障抗风能力6级(地面风速小于10 m/s)悬停定位精度垂直±0.5 m;水平±1 m;航迹控制精度<1 m防水等级飞机整体不小于IP64降雨
3 三维模型的生成
目前市场有许多影像建模软件,如Benetly,Context Capture,Photoscan,Pix4D等,本文主要采用Context Capture(原名Smart 3d,以下简称CC)进行三维模型的生成[5]。CC主要需要一组数码相片作为输入数据源,加入传感器属性(焦距、传感器尺寸、主点等),照片的位置参数、照片的姿态参数、控制点等等,无需过多人工干预,能输出高分辨率带有真实纹理的模型。CC有单机版和联机版本,本文区域面积较小,拍摄照片不多因此未采用集群方法,直接采用单机版CC进行数据处理。在建模区域很大、获取照片数量较多可以采用局域网内的联机计算通过多台计算机同时对一个工程进行计算大大缩减计算时间。

表2 镜头参数
经过检查相关数据,检验航线轨迹和控制点是否在所需拍摄范围内,可以进行建设三维模型。
3.1 工程建立
首先打开Engine(或者在提交空三运算和重建三维模型运算的时候打开也行),然后再打开Master模块,首次打开该模块后,会弹出对话框,让设置引擎路径,即Job queue,设置好路径后,就可以建立工程了。建立工程,主要是加载影像(以及pos数据),有两种方式:New Block和Import blocks。New Block设置好路径后,点击OK,在空区块中选择photos菜单,然后点击Add photos或Add entire directory,将影像分别加载进来;Import blocks是将影像的一些参数以及路径都保存在一个*.xls或*.xml中,然后通过导入块,软件自动读取需要的数据。
3.2 像控点输入
在控制点的编辑过程中,先选择成果所需的空间参考,输入控制点信息,并在每个控制点下添加对应的影像(每个相机的影像至少1张,而一般情况每个相机每个控制点至少3张)并标志控制点所在具体位置,保存控制点信息。在空三加密前和空三加密后刺点都可以,建议在空三加密之后刺控制点,这样就可以通过同名点约束来匹配得出控制点所在的刺点片,达到快速刺点的目的。
3.3 空三加密
空中三角测量是生成模型中重要的一步,在完成空三加密之后,得到一个新区块,并且每张影像具有了精确地内外方位元素,可以对加密成果在3D view下查看,如果有必要也可以添加连接点,可以点击Aerotriangulation report后的View或Open来查看连接点和控制点的误差。“空三”关系模型查看无明显错误后,可计算三维模型/提交重建任务(Submit new production)。在完成计算后,CC会给出一个质量报告,需要注意的是要关注报告中的几个参数,一个是photo matching中连接点的重建误差均方根(RMS),一个是控制点的重建误差均方根,一般来说普通无人机在的RMS要小于0.6,控制点的值小于1。
3.4 模型输出
CC会根据计算机内存大小将项目分割成大小不一的瓦片进行重建,此时需要注意存储路径所在盘大小和生成模型大小。在软件中可以通过点击Spatial framework后,在上图界面中,可以设置输出模型的大小范围,可以通过坐标输入,也可以通过Import from KML来导入,导入的范围可以在谷歌地球或者LocaSpace中画出来,保存成*.kml即可。由于影像多,所以就会输出很多瓦片,瓦片大小的设置如下图所示,改变Tile size可以增减输出瓦片的数量,一般默认就可以了,如果数据量大,可以集群来处理。
模型构建先按照点云生成、构建TIN模型和纹理自动映射来完成的。根据空三计算出来的外方位元素,通过影像匹配得到高精度的点云,通过配对TIN模型的每一个三角面与对应纹理影像进行模型自动纹理映射,最后得到三维模型[6]。
模型的精度由多种因素共同决定,如外业控制点的布设数量、影像重叠度、拍摄影像质量、飞机飞行高度等。可以在控制点之外选择更多的控制点,也就是不进入空三结算,量测检查点在模型上对应位置的坐标,与真值进行比对,检查模型的绝对精度。
生成的模型利用CC中viewer打开,还可以获取空间距离、面积、体积等量测,本文以学校为测试区进行飞行,图2为生成学校的三维模型,而在实际城市中用同样方法建立三维模型,可以结合建筑高度、日照分析等。

4 结语
目前,该软件存在不能对其过程数据编辑的问题,因此,在实际像素进行查看时,地物连接处可能会存在明显的边缘粘连情况,因此必须通过第三方工具进行处理。总的来说,无人机倾斜摄影测量技术的诞生,相关软件几乎全过程自动化生产,为快速生成城市实景三维模型带来了契机。通过倾斜摄影测量技术,快速建设出城市的三维模型,将城市面貌直观的展现在大家面前,同时能够帮助城市管理者在城市规划、拆迁、改造、交通管理等方面提供新的思路。