复合式垂直起降固定翼无人机旋翼和机翼的干扰分析
2019-12-31张飞王云谭锟
张飞,王云,谭锟
(南昌航空大学 飞行器工程学院,南昌 330063)
0 引 言
垂直起降固定翼无人机兼具固定翼飞机速度快、航程远和多旋翼无人机可垂直起降的优点,大大扩展了无人机的应用范围。国内外从20世纪60年代起就开始有垂直起降方面的研究[1],其中一类为多旋翼和固定翼无人机相结合的复合式垂直起降固定翼无人机。在此类无人机中,对无人机垂直起降总体方案类的研究较多[2-4],但对无人机旋翼的安装方式及旋翼与机翼之间的气动干扰分析研究较少,且复合式垂直起降固定翼无人机为一种较为特殊的机型,其旋翼与机翼之间的气动干扰比较复杂,因此本文结合具体工程案例对复合式垂直起降固定翼无人机的旋翼和机翼之间的气动干扰进行分析。
多旋翼部分作为无人机的重要结构之一,其参数的合理性直接影响到无人机在垂直起降状态和平飞状态的飞行品质[5]。提供无人机垂直起降动力的旋翼对机翼的吸抽效应,及其旋转产生的下洗流都会对旋翼自身的流场和机翼的流场产生一定程度的干扰[6]。为此,本文在垂直起降固定翼无人机总体设计的基础上,给出两种旋翼安装方案,并通过实验和流体仿真两种方法对旋翼与机翼之间不同距离下的气动特性进行分析,得到相应的旋翼与机翼的合力,并结合无人机的平飞状态进一步确定了旋翼的安装距离。
1 无人机模型及旋翼的两种安装方式
垂直起降固定翼无人机的主要结构包括固定翼机体和四个单旋翼系统两部分。旋翼和机翼的三维组合模型如图1所示。安装在机身尾部的旋翼为可倾转旋翼,其余三个旋翼不可倾转。该无人机在垂直起降状态时,四个旋翼同时工作,旋翼面处于水平状态以产生向上的升力。无人机在巡航状态时,安装在机身尾部的旋翼倾转90°使旋翼面处于竖直状态以产生向前的推力,其余三个旋翼停止工作。
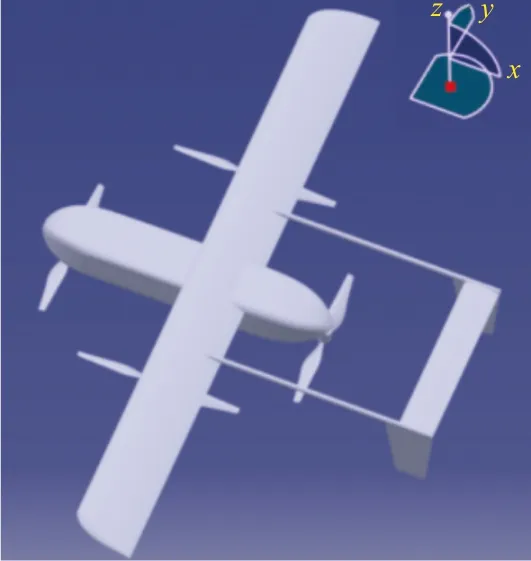
图1 旋翼和机翼组合模型Fig.1 Rotors and wing combined model
本文主要通过研究单旋翼和机翼组合的气动特性来确定部分系统参数。无人机的主要几何参数为:无人机机翼翼展2.4 m,弦长0.24 m;旋翼与机翼连接的支座距离为d;计算采用两叶旋翼,直径为610 mm;z轴为旋转轴;xOy平面为旋转平面。该旋翼已经进行过多次地面试验,试验数据较全面,便于开展分析研究。为便于计算,作如下假设:
(1) 只考虑旋翼和机翼之间的气动流场,暂不考虑模型受其他部件的气动影响[7](不考虑机身、尾撑杆等其他部件的气动影响);
(2) 流动是定常且稳定的[8];
(3) 在平飞状态时,旋翼处于非旋转状态;
(4) 所有桨叶均是刚性元件,在气动力作用下,都不发生任何弹性变形[9](扭转、弯曲和拉伸)。
由于不同的旋翼安装方式所产生的力的效果是不同的,机翼对其流场的干扰影响也是不同的。旋翼安装在机翼下方如图2(a)所示,旋翼安装在机翼上方如图2(b)所示,两种方案下旋翼均产生向上的升力。
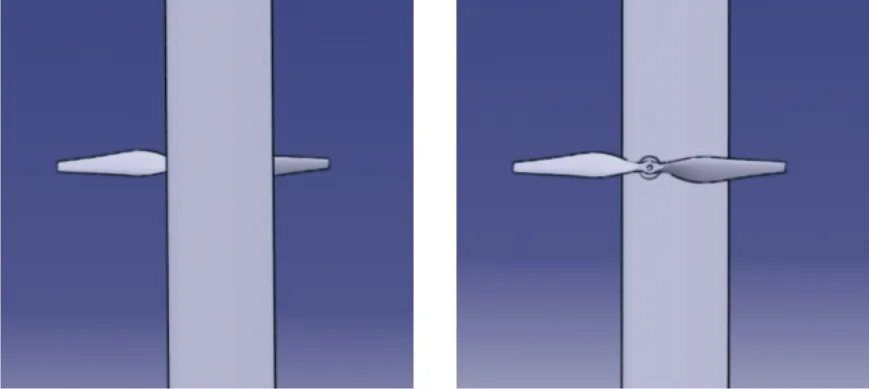
(a) 方案一 (b) 方案二
图2 旋翼安装方案
Fig.2 Rotor installation schemes
2 求解方法和边界条件
通过众多飞行实践可知,当来流马赫数Ma≤ 0.3时,空气压缩程度很小,可以忽略空气的可压缩性,将空气当作不可压流;当Ma>0.3时,则需要考虑空气的可压缩性[10]。由于本文旋翼转速达到3 000 r/min,并未超过Ma=0.3的临界值,故采用理想不可压缩气体模型。
本文所采用几何模型如图2所示,计算采用的湍流模型为壁面自适应局部涡粘大涡模拟模型,算法为格子-玻尔兹曼法(LBM-LES)算法[11-12]。采用LBM-LES方法的粒子分布网格如图3(a)和(b)所示,图中网格密的区域表示粒子的尺度小。根据每一个时间步计算得到的涡量然后对粒子分布进行自适应动态加密如图3(b)所示,这样在提高计算精度的同时没有过大的增加计算量。本文算例边界条件为:-x为速度入口边界条件,其余均为周期性边界条件。同时为了验证所采用的螺旋桨和气动力计算模型,在南昌航空大学无人机研究所进行了实验验证,实验设备及实验模型如图3(c)所示。

(a) 局部粒子分布

(b) 自适应后粒子分布
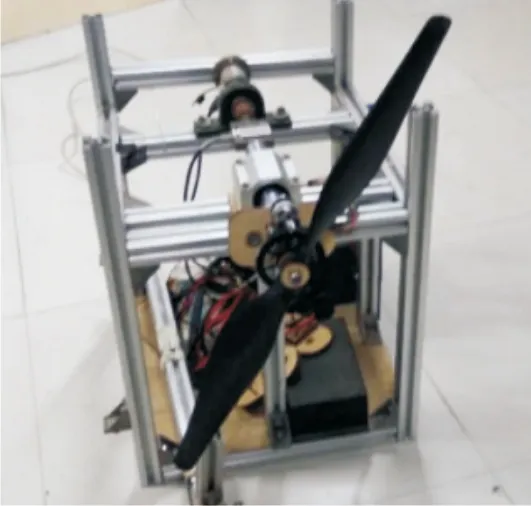
(c) 实验设备和实验模型图3 LBM-LES方法的粒子分布及实验设备和实验模型Fig.3 Particle distribution of LBM-LES method and experimental equipment and experimental model
3 数值模拟结果、实验结果及分析
3.1 计算方法验证
为保证本文计算方法的可靠性,对该旋翼模型分别进行不同转速下的CFD静拉力计算和经验公式理论计算[13]及实验,并将计算结果与其实验数据进行对比。计算结果如图4所示。
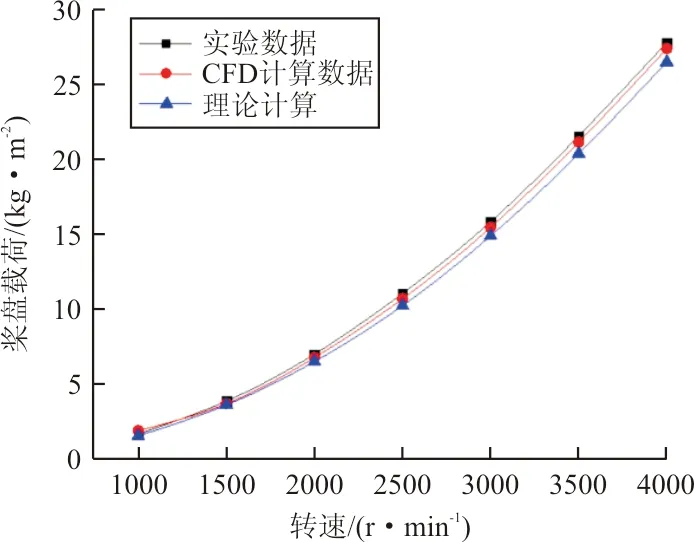
图4 计算数据与实验数据对比Fig.4 Comparison of the calculation data and experimental data
从图4可以看出:计算数据与试验数据结果吻合度良好。数据上存在的一些细微差别,主要是在仿真和实验条件下,由密度或粘性系数略有不同导致的。同时由于实验系统中,螺旋桨下游是实验装置结构,对滑流有遮蔽作用,因此实验数据比理论计算数据略大。由此可以断定,该计算方法正确可靠,可用于该无人机物理模型的气动特性研究。
3.2 旋翼安装在上下翼面的气动特性分析
由于机翼会阻挡旋翼的气流流动,在设计时需要充分考虑机翼对旋翼的气动干扰[14]。因此,采用上述计算方法,在无来流速度、旋翼转速NS=3 000 r/min条件下,分别对两种旋翼安装方案在不同旋翼与机翼间距下进行仿真分析,为明确最终方案和选择适宜安装距离d提供参考。仿真结果如图5所示,可以看出:与孤立状态下旋翼正转产生的升力相比,两种方案下旋翼自身的升力受机翼干扰造成的影响不大。当距离较小时,由于机翼对于旋翼的气流干扰,旋翼的升力会出现小幅度的增长[15]。之后,随着距离d的逐渐增大,气流干扰逐渐消失,旋翼拉力逐渐趋于孤立状态下的静拉力值。
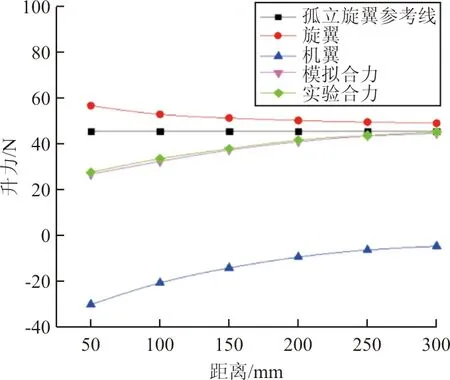
(a) 方案一
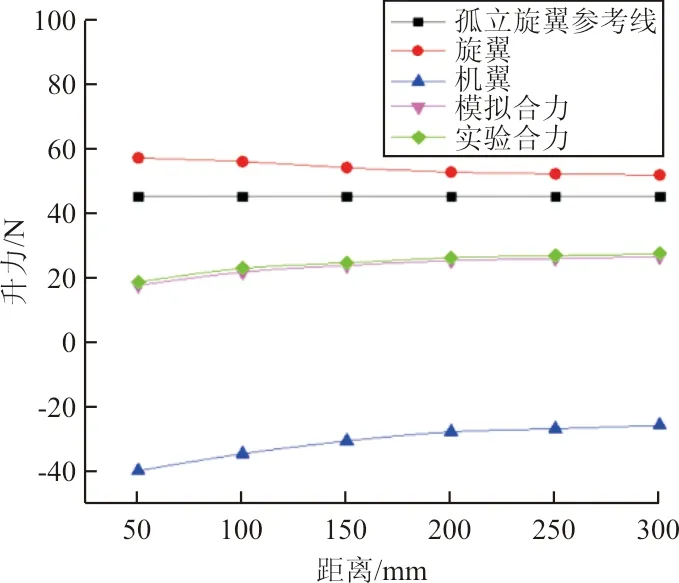
(b) 方案二图5 旋翼升力及组合体合力随旋翼与机翼间距的变化Fig.5 The rotor lift and the combined force varied with the distance between the rotor and the wing
从图5可以看出:在两种方案下,组合体整体的合力受气流干扰影响很大。方案一中旋翼安装在机翼下方,一方面由于旋翼的抽吸作用使得旋翼上方的气流由上而下运动,致使机翼受到一个向下的力。随着距离d的增加,机翼周围的流场受旋翼气流的干扰逐渐减弱。另一方面,旋翼和机翼之间的区域存在低压区,当旋翼接近机翼时,机翼前后存在明显的压差阻力,随着d的增加,压差阻力逐渐减小,组合体整体合力增大。从图5(a)可以看出,在d=200 mm之后,组合体效率损失已经缩小到15%以内。
对于方案二,旋翼安装在机翼上方,由于旋翼下洗气流增加了机翼上翼面的来流速度,造成了机翼上翼面压力的增加,导致整体合力减小,即无人机悬停状态动力减小,大大降低了无人机的悬停效率。随着旋翼与机翼间距d的增大,整体合力逐渐增大,但由图5(b)可以看出,直至d=300 mm处的效率损失仍大于30%。
3.3 上下翼面安装距离为150 mm时的气动特性对比
从图5可以看出:当d=50 mm时,旋翼的升力变化最快;当d=300 mm时,旋翼的升力逐渐趋于稳定。而d=150 mm时能够更典型的体现安装距离对气动的影响,所以选择d=150 mm来进行下一步的气动特性对比。d=150 mm时,方案一和方案二的桨盘载荷与功率载荷变化对比图如图6所示。可以看出:随着桨盘载荷的增加,方案一和方案二的功率载荷皆逐渐下降;在相同的桨盘载荷下,方案一的功率载荷优于方案二的功率载荷,且方案一和方案二的功率载荷相差较大。

图6 方案一和方案二的桨盘载荷与功率载荷变化Fig.6 Variation of the rotor disk loading and power loading of scheme 1 and scheme 2
d=150 mm,NS=3 000 r/min时,旋翼吸力面和压力面的压力分布对比图如图7所示。

(a) 吸力面压力分布
(b) 压力面压力分布图7 旋翼压力分布云图Fig.7 The pressure nephogram of the rotor
两种不同安装方式下的旋翼吸力面、压力面压力云图基本一致,可见旋翼受机翼影响不大,图5中的旋翼拉力变化曲线也证明了这一点。
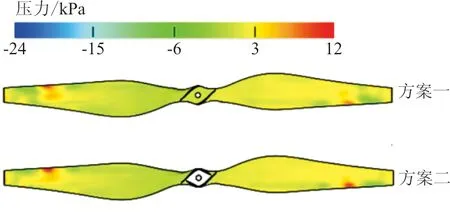
d=150 mm处旋翼与机翼之间区域的压力云图对比如图8所示。可以看出:旋翼的抽吸和下洗流对流场的干扰作用[16]主要集中在旋翼接近机翼部分的区域。在旋翼的下洗流区内,方案二的机翼上翼面受下洗流的冲击作用,形成高压区;方案一的安装方式使得机翼下翼面的压力分布相对均匀,形成低压区,受旋翼影响较小,与方案二相比,明显降低了机翼上下翼面的压差阻力。

(a) 方案一
(b) 方案二图8 旋翼与机翼之间区域压力云图Fig.8 The pressure nephogram of the area between rotor and wing
距离d=150 mm时两方案气流区的xOz平面速度图如图9所示。通过对比可以看出:对于方案一,机翼阻碍了旋翼上方的气流流动,机翼上翼面基本无气流流动,对旋翼的下洗流无影响,旋翼气流前后流动方向一致,旋翼的气流受机翼干扰较小;对于方案二,机翼严重阻碍了旋翼的下洗流流动,使机翼上下气流不能形成一致的流动方向,且旋翼的下洗气流较集中、速度较大,致使旋翼的气流受机翼干扰很大。因此,本节证实了方案一的优越性。
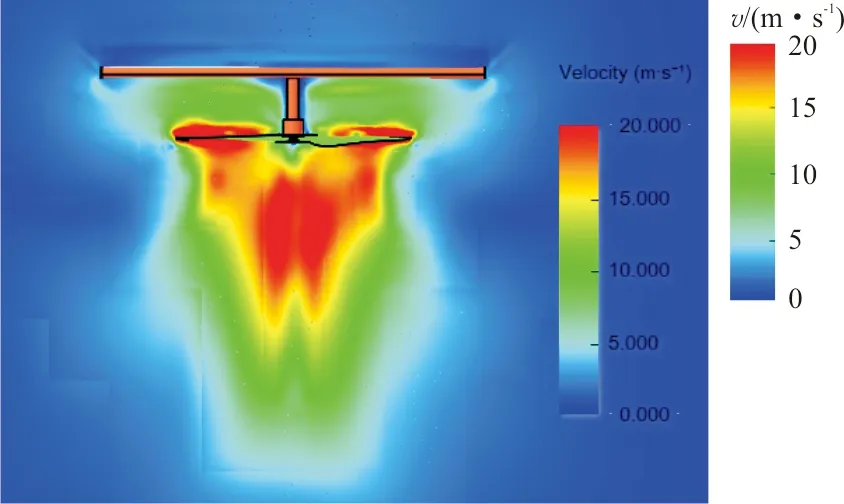
(a) 方案一
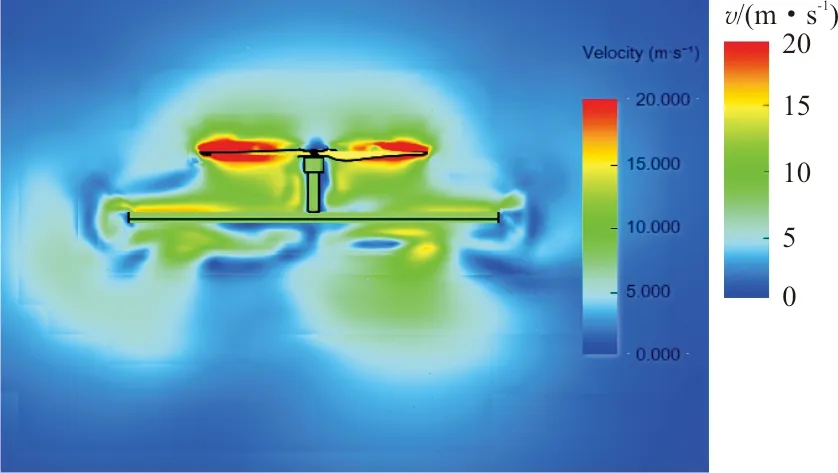
(b) 方案二图9 旋翼与机翼之间区域速度云图Fig.9 The velocity nephogram of the area between rotor and wing
3.4 确定机翼与旋翼之间的最佳安装距离
上述计算均是在无人机处于悬停状态进行的,旨在分析两种方案的优越性及对无人机整体的影响。结果证明方案一相对于方案二更好,且在悬停状态下机翼与旋翼之间的安装距离越大越好,但是机翼与旋翼之间的安装距离同时影响无人机在平飞状态时的平飞阻力和续航性能。故基于上述计算方法和已确定的参数,下面结合无人机的平飞状态进一步确定机翼与旋翼之间的最佳安装距离。
对于无人机的平飞状态和悬停状态,首先确定以下主要参数,具体参数如表1所示。
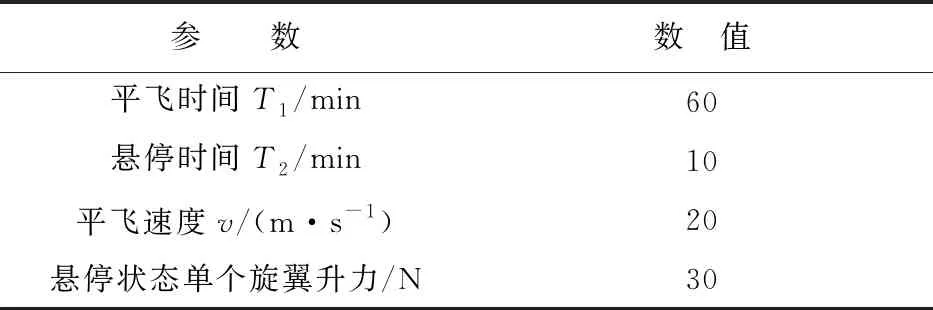
表1 无人机平飞状态和悬停状态主要参数Table 1 Main parameters of level flight status and hover status
无人机的基本飞行任务为悬停10 min,平飞60 min,平飞速度为20 m/s,无人机悬停状态单个旋翼维持升力为30 N。机翼与旋翼之间的安装距离会影响无人机在悬停状态的悬停效率和平飞状态的平飞阻力。当无人机完成整个飞行任务后,不同的安装距离d会产生不同的总任务功耗W,最低的功耗即代表最佳的安装距离。
机翼和旋翼不同安装距离产生的无人机平飞阻力系数Cx如图10所示,机翼和旋翼不同安装距离产生的无人机悬停状态功耗Wz、平飞状态功耗Wx和总任务功耗W如图11所示。其中,平飞阻力系数Cx为仿真计算值,悬停状态功耗Wz为单个旋翼维持30 N升力悬停10 min的实验测试功耗;平飞状态功耗Wx为理论计算值;电机调速器效率ηd、电机效率ηm和螺旋桨效率ηp取值均为80%[17]。
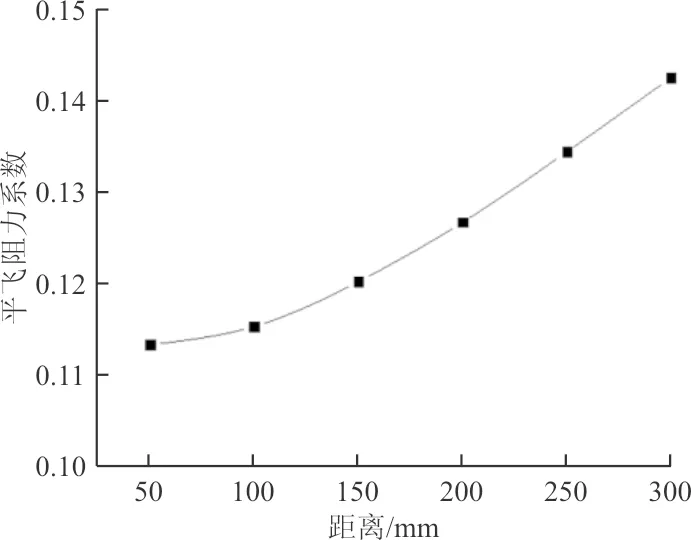
图10 不同安装距离产生的平飞阻力系数CxFig.10 Level flying resistance coefficient Cxcaused by different installation distances
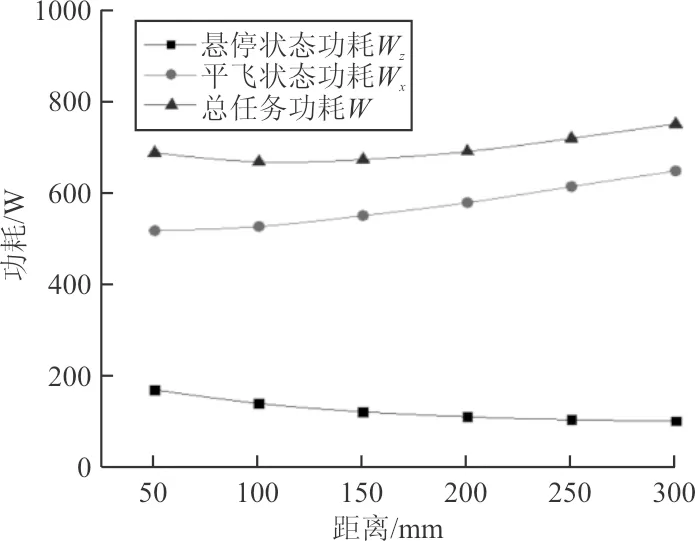
图11 不同安装距离产生的悬停状态功耗Wz、 平飞状态功耗Wx和总任务功耗WFig.11 Hover state power consumption Wz and level flight power consumption Wx and total task power consumption W caused by different installation distances
从图10可以看出:随着安装距离d的逐渐增大,无人机的平飞阻力系数Cx逐渐增大,且当安装距离d大于150 mm时平飞阻力系数Cx与安装距离d呈线性关系。从图11可以看出:随着安装距离d的逐渐增大,无人机的悬停状态功耗Wz逐渐减小,平飞状态功耗Wx逐渐增大,总任务功耗W呈现先减小后增大的趋势。当安装距离d=100 mm时,无人机的总任务功耗W最小,即d=100 mm为方案一的最佳安装距离。
4 结 论
(1) 在机翼上安装旋翼,旋翼安装在下翼面时的整机悬停效率比安装在上翼面时的整机悬停效率要高。
(2) 旋翼安装在下翼面时,随着安装距离的增加,无人机整体在悬停状态的气动特性所受影响逐渐减小。
(3) 该无人机的平飞阻力随旋翼与机翼之间安装距离的增加而增大,结合无人机整体的悬停时间和平飞时间,旋翼与机翼之间的最佳安装距离为100 mm。
