原子力显微镜工作原理演示仪
2019-12-30胡建桥
苏 峻,胡建桥
(1.南京林业大学 理学院,江苏 南京 210037;2.南京本征仪器有限公司,江苏 南京 210037)
原子力显微镜(Atomic force microscope, AFM)是以nm级分辨率获得样品表面三维形貌和物理、化学性质的检测和分析仪器[1-2]. AFM现已成为科学研究的一种重要的测试手段,广泛地应用于物理学、化学、材料学、微电子学、生物学、医学等研究领域[2-3]. 国内很多高校和研究机构有AFM设备,很多高校面向高年级本科生和研究生开设了介绍AFM原理和操作的理论和实验课程[4-5]. 由于AFM属于精密测量设备,其探针、微悬臂等部件很微小(微悬臂长度一般在几十到几百μm,探针针尖的曲率半径一般在几nm到几十nm),肉眼很难看到;光路系统一般隐藏在仪器内部,不能观察其结构;压电扫描管的扫描范围很小(一般在几十μm以内),扫描过程也很难观察. 由于无法对照实物进行直观地讲解,在AFM的理论和实验教学中,学生在AFM工作原理的理解上存在一定的困难.
本文设计了AFM工作原理演示仪,通过光学、机械结构及利用单片机控制电路从宏观上模拟AFM的内部光路、光学放大及微悬臂共振,模拟样品压电扫描系统的扫描过程,模拟AFM接触和轻敲工作模式,使刚接触AFM的学生和实验人员能够直观地了解AFM的工作原理,同时有助于实验教师和培训人员的指导和培训工作.
1 AFM的结构和原理
原子力显微镜工作原理演示仪参考国产SPM(Micro Nano D-5A,上海卓伦微纳米设备有限公司生产)的内部结构,主要对其光电检测系统和压电扫描系统的结构以及接触和轻敲2种工作模式进行了宏观模拟.
AFM主要由力检测和反馈系统、压电扫描系统、数据处理与显示系统、隔震系统等组成[1]. 其中,常规AFM力检测系统又由探针和微悬臂组成的极敏感的力传感器和检测微悬臂弯曲变形或振荡变化信号的光电检测系统构成. 此外,常规AFM利用压电扫描系统控制样品台和样品在X-Y平面上扫描,并通过Z方向上的反馈控制实现样品表面形貌的三维成像.
1.1 光电检测系统
光电检测系统是AFM的重要组成部分,先利用光杠杆原理将微悬臂的弯曲形变或振动变化进行光学放大,然后利用光检测器将其转换为电信号. 光电检测系统主要包括半导体激光器、反射镜、微悬臂及探针、四象限光检测器等.
光学放大原理如图1所示,半导体激光器发出的激光经过平面镜A反射至微悬臂上,再通过平面镜B将微悬臂反射的激光反射至四象限检测器,并由四象限检测器将光点位置变化(接触模式)或振动幅度和相位(轻敲模式)的信号转换为电信号. 以接触和恒高模式为例,在对样品进行扫描时,探针的微悬臂由于样品表面的起伏变化而弯曲变形,微悬臂表面反光层与其初始位置角度θ随着物体表面高度变化而发生相应变化. 根据反射定律,由微悬臂反射的激光束与原位置的夹角为2θ. 再经过平面镜B反射后,在四象限检测器上,光点位置发生变化,其位移Δy与θ成正比,也与激光从微悬臂反射后至四象限检测器的总光程成正比. 这样就实现了样品表面起伏形貌变化的光学放大.
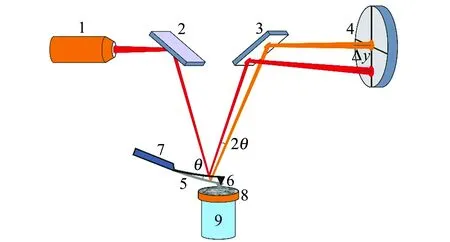
1.激光器 2.平面镜A 3.平面镜B 4.四象限光检测器 5.微悬臂 6.探针 7.压电振荡器 8.样品台及样品 9.压电扫描管图1 光电检测系统的原理
1.2 AFM工作模式
AFM主要有2种常用工作模式,即接触模式和轻敲模式.
接触模式下,针尖始终和样品接触,扫描过程中针尖在样品表面滑动,通过微悬臂的弯曲变形进行测量. 对于表面较硬、较为平整且不容易移动或变形的样品,接触模式一般可以产生稳定的、分辨率较高的图像. 但是由于该模式下针尖和样品发生直接接触和摩擦,容易引起样品或针尖的损伤.
轻敲模式下,微悬臂在压电振荡器的激励下在其共振频率附近做受迫振动,振动的微悬臂和探针对样品表面进行扫描,样品表面的起伏引起微悬臂的振幅产生相应的变化,使激光光点在光检测器上的振幅也发生相应的变化,最后通过处理和分析得到样品的表面形貌. 轻敲模式下,针尖对样品进行“敲击”,两者间只有瞬间接触,能有效克服接触模式下因针尖的作用力,尤其是横向力引起的样品表面和探针的损伤.
1.3 压电扫描系统
压电陶瓷材料具有压电效应,当在压电陶瓷对称的2个端面加电压时,压电陶瓷按特定的方向伸长或缩短. 因此可以通过改变电压的极性来控制压电陶瓷的微小伸缩,而伸长或缩短的大小与所加的电压的大小成线性关系. AFM使用压电陶瓷材料制作的扫描管精确控制样品在X-Y平面上做规则的扫描运动,同时在Z方向上实时反馈控制探针与样品间的距离,从而实现了样品表面形貌的三维扫描.
2 演示仪的结构和功能
演示仪的结构如图2所示,利用半导体激光器、2只平面镜、金属弹片及探针、振动电机、光屏等对AFM的力检测和光路系统进行放大模拟,同时利用2个相互垂直的微型步进电机滑台构成的移动平台,模拟压电扫描管的平面扫描运动.

1.有机玻璃框架 2.半导体激光器 3.平面镜A4.平面镜B 5.反射镜调节旋钮 6.弹片 7.反光膜8.探针 9.振动电机 10.样品 11.二维电机滑台 12.手动升降平台 13.光屏 14.单片机控制盒15.触摸显示屏 16.直流稳压电源图2 AFM工作原理演示仪的结构
演示仪的结构、原理和功能如下:
1)利用长条形不锈钢弹片模拟AFM的微悬臂. 弹片自由端一侧上表面贴有铝反射膜,用于增强弹片表面对激光的反射率,并形成镜面反射. 利用微型振动电机粘于弹片固定端一侧下表面来激发弹片振动,模拟AFM轻敲工作模式下的微悬臂振动(图3). 弹片的振动频率和幅度可以通过调节振动电机的电压来调节.
2)利用较细的圆珠笔笔头粘于弹片自由端一侧下表面来模拟AFM探针,笔尖上的滚珠可以有效减小扫描过程中其与模拟样品间的摩擦,并减小了磨损.

1.弹片 2.反光膜 3.激光光点 4.探针 5.振动电机 6.样品 7.样品台 8.电机丝杆 9.二维电机移动平台外壳图3 反光弹片及二维电机移动平台的结构
3)利用3D打印制成多球面包络形状的模拟样品(图3). 通过样品背面嵌入的铁片与样品台上嵌入的磁铁相互吸合的方法将样品固定于样品台上,这样可以方便地更换样品.

1.半导体激光器 2.平面镜A 3.平面镜B 4.弹片5.反光膜及表面的激光光点 6.弹片上光点位置Y方向调节旋钮 7.弹片上光点位置X方向调节旋钮 8.光屏上光点水平(Y)方向调节旋钮 9.光屏上光点竖直方向调节旋钮 10.圆珠支撑结构 11.拉紧弹簧结构 12.有机玻璃板框架图4 光路结构(俯视图)
4)半导体激光器(650 nm)做光源,利用2面方向角度可调的表面镀膜平面反射镜模拟AFM的光路调节结构(图4),利用光屏模拟光检测器. 其中,通过调整2个调节旋钮(图4中结构6和7)调节平面镜A的角度来调节激光光点打在弹片反光膜上的位置,以模拟AFM实验过程中调节激光打在微悬臂上位置的过程;通过调整另外2个调节旋钮(图4中结构8和9)调节平面镜B的角度来调节激光光点打在光屏上的位置,以模拟AFM实验过程中调节激光光点最终打到光检测器中心的过程.
5)利用2个相互垂直的微型步进电机丝杆滑台(CD光驱中激光头的驱动滑台)构成的二维移动平台模拟AFM实验过程中压电扫描管控制样品台在X-Y平面上作“Z”字形扫描运动.
6)利用单片机(STC15W4K32S4)控制电路实现振动电机和步进电机的驱动控制,以及触摸液晶屏的显示和操作. 单片机控制系统的结构如图5所示.
7)利用手动升降平台调整样品与探针的距离.
8)演示仪安装在透明有机玻璃板框架上,可充分展示其内部构造.
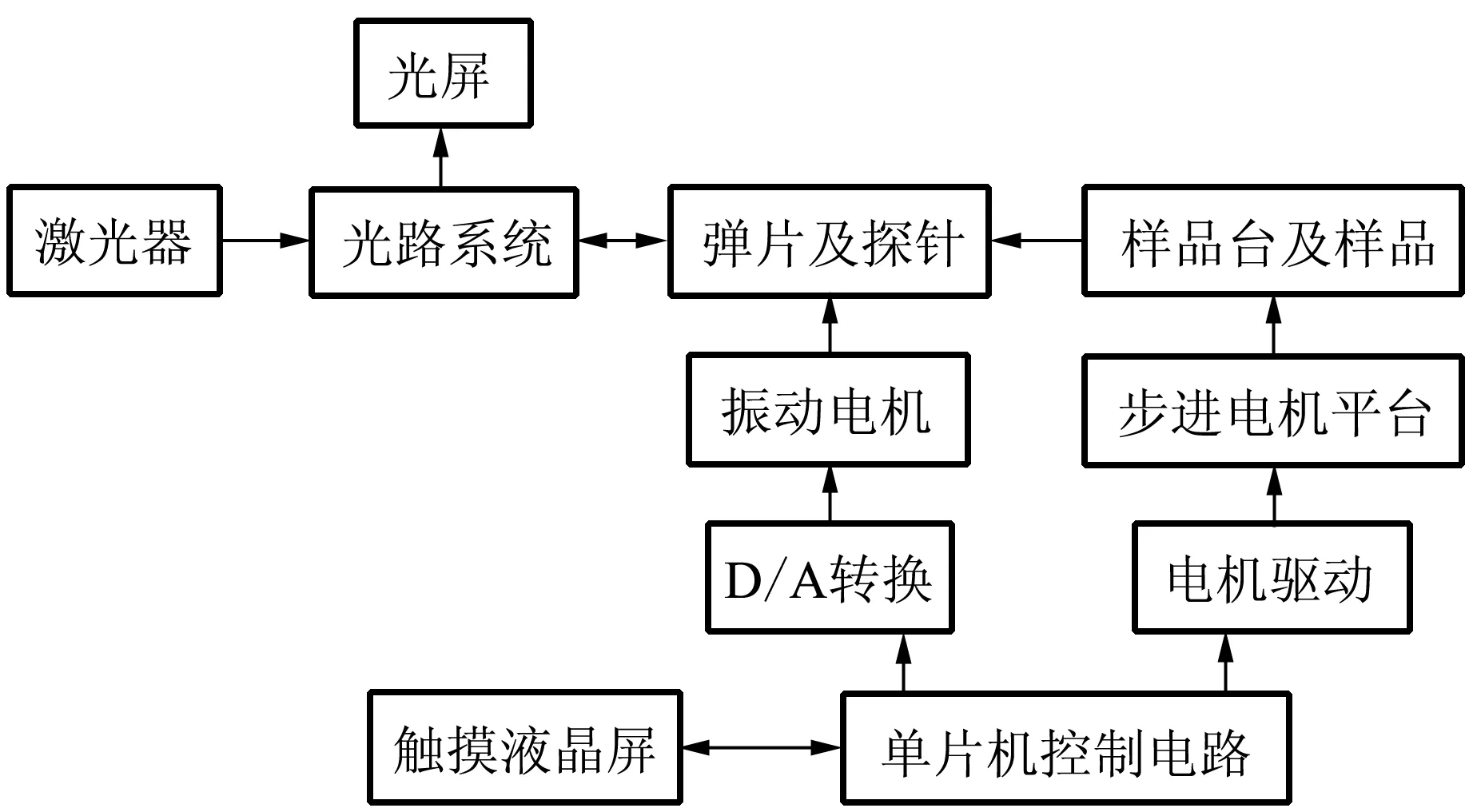
图5 单片机控制系统的结构框图
3 演示仪的使用方法
1)打开演示仪电源开关,调节平面镜A,使得激光光点打在弹片上反光膜的中心位置. 再调节平面镜B,使激光光点打在光屏的中心位置.
2)在触摸显示屏上选择工作模式,设置扫描范围和扫描速度等参量.
3)工作模式若选接触模式,调节升降平台使探针轻微压在模拟样品上一定距离,点击按钮开始扫描.
4)工作模式若选轻敲模式,则进一步设置弹片振动幅度. 调节升降平台抬高样品,使样品与振动的探针轻微接触,并使光屏上的光点振幅适当减小,点击按钮开始扫描.
5)扫描过程中,适当调节升降平台,使得光点的位置(接触模式)或光点的振幅(轻敲模式)随样品扫描过程呈连续变化.
6)观察样品扫描过程中光点的位置或光点的振幅随样品表面起伏的变化.
4 演示结果
实验中分别在接触模式和轻敲模式下对样品进行了扫描. 扫描过程中可以观察到探针相对样品在水平面上做周期性“Z”字形扫描运动.
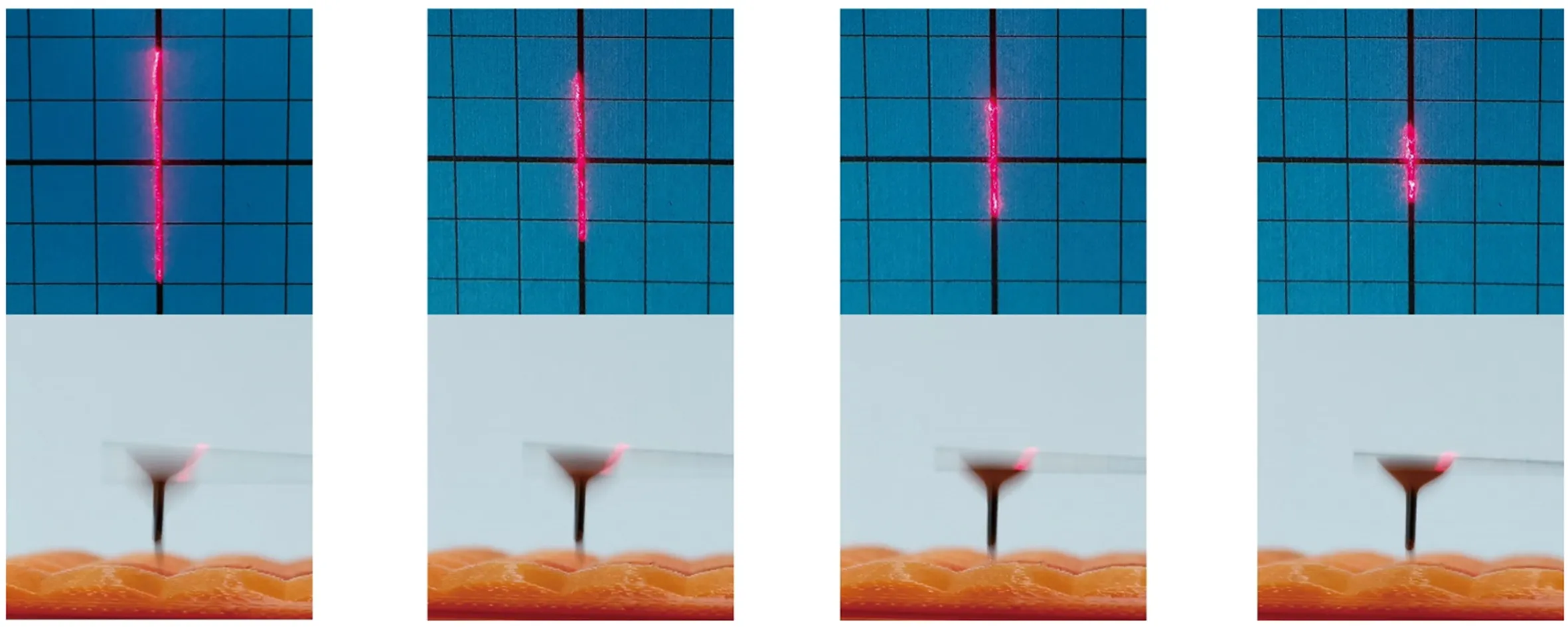
在接触模式下,可以观察到光屏上光点的位置随探针在样品表面的扫描而不断变化,光点在光屏上的位置变化反映了样品表面高度起伏的变化(图6).
在轻敲模式下,可以观察到光屏上光点振幅的大小随探针在样品表面的扫描而不断变化,光屏上光点的振幅的变化反映了样品表面高度起伏的变化(图7).
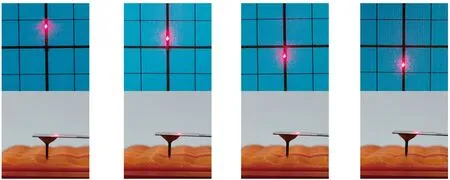
(a) (b) (c) (d)图6 接触模式实验结果
(a) (b) (c) (d)图7 轻敲模式实验结果
对光屏上光点的位置或振幅的变化与样品表面起伏高度进行比较,可知该光路系统的放大倍数约为10. 实验演示了AFM光路放大和扫描成像的原理,具有很好的演示效果.
5 结束语
该演示仪实现了AFM相关结构和原理的模拟,具有很好的实验演示和科普展示效果,可使刚接触AFM的学生能够直观地理解AFM的工作原理,并有助于AFM操作. 不过该装置暂时只能模拟AFM恒高模式下的扫描过程,若加装简易光电检测装置,并增加电动升降台结构对样品台实施反馈升降控制,可实现AFM恒力模式扫描成像过程的演示. 此外,可通过单片机系统对光电检测装置的信号和升降台反馈控制信号进行处理和分析后,在液晶屏上显示样品表面的大致形貌. 这些改进有望可以更加全面地演示AFM的工作原理.