舰载无人机拦阻着舰中机身冲击响应分析
2019-12-27熊文强张闰张晓晴朱小龙高宗战刘晓明何敏姚小虎
熊文强,张闰,*,张晓晴,朱小龙,高宗战,刘晓明,何敏,姚小虎
1. 华南理工大学 土木与交通学院,广州 510640 2. 成都飞机工业(集团)有限责任公司 技术中心,成都 610092 3. 西北工业大学 力学与土木建筑学院,西安 710129
舰载无人机的拦阻着舰过程主要包括调整飞机进场姿态、下放拦阻钩、拦阻钩挂索、着舰滑行、减速至零停稳等阶段。这一过程在极短时间内完成,稍有差错便可能造成严重后果,是舰载无人机事故率最高的阶段[1],需要在设计中重点关注。
国外学者对舰载机拦阻着舰过程的理论、仿真计算和试验做了大量的研究工作:Gibson和Cress[2]对拦阻索受到冲击载荷、s应力波的传播和拦阻钩挂索问题进行研究,提出了拦阻索性能评判准则和拦阻索的设计建议。Billec[3]开展了不同着舰质量和甲板宽度的拦阻试验,发现在130英尺最大甲板宽度下的拦阻钩侧向载荷峰值和拦阻索的张紧力峰值最低。Hsin[4]给出了舰载机着舰后的二阶运动方程,利用数值仿真方法求解飞机动响应的时间历程。Lyle[5]从试验数据拟合出飞机拦阻力与总质量、着舰速度和偏心度的函数,得到用于预测飞机拦阻力的拟合公式。Montgomery和Granda[6]采用美国MIT的Paynter[7]教授提出的键合图方法对舰载机拦阻着舰拦阻过程进行参数化建模与仿真,该方法大大减少了建模时间和提高了仿真计算效率,可以对舰载机拦阻着舰过程进行快速、准确地仿真计算。
中国学者对舰载机着舰的研究起步较晚,但是发展迅速,针对理论研究和数值模拟做了大量的工作。宋锦春和张志伟[8]建立了飞机拦阻运动微分方程,通过求解数学模型分析液压拦阻器的拦阻性能。王钱生[9]对美国军标舰载机着舰下沉速度规定的发展变化进行了初步研究,讨论了计算着舰下沉速度的修正方法。吴娟等[10]建立重型飞机拦阻系统的动力学模型,利用Simulink仿真模拟飞机拦停过程,分析飞机参数和拦阻装置对拦阻性能的影响。李启明等[11]考虑拦阻钩冲击载荷下的应力波作用,建立了舰载机对中拦阻动力学模型,通过数值仿真分析飞机着陆质量和啮合速度对拦阻效果的影响。万晨[12]利用ANSYS建立了MK7-3型拦阻装置,对刚柔耦合模型进行了动态特性研究。杨全伟[13]实测了某舰载飞机拦阻着舰时的拦阻钩载荷,计算出拦阻功量及拦阻系统的效率,得到三向载荷模型比常规单向载荷模型与更具工程意义。沈文厚等[14]建立多体系统动力学模型,研究拦阻索应力传播规律及峰值决定因素。刘成玉和王斌团[15]建立起机身刚体、起落架缓冲和拦阻系统模型,仿真析得到拦阻系统的动响应。何敏等[16]建立了舰载飞机-拦阻钩的多体动力学模型,对弹射状态下的机身响应进行了研究。闵强等[17]对舰载机飞行剖面以及拦阻着舰任务剖面特点分析,基于仿真结果编制出飞机拦阻着舰过程重心谱,绘制出载荷谱超越曲线。
目前已公开的舰载机拦阻着舰研究文献多为理论分析和数值模拟,侧重于拦阻装置和拦阻索的性能研究,对着舰过程的研究多关注于机身姿态和航迹,极少考虑机身结构的动态响应,相关的试验方案设计及研究更是空白。然而,在舰载机着舰的短历程大载荷的冲击作用下,从拦阻钩挂索到舰载机拦停,机身过载和应变响应的峰值和传递规律对机体结构有不容忽视的较大影响,对此问题的深入研究对飞机结构强度设计具有极为重要的工程意义。
本文以某舰载无人机的实际中机身结构为研究对象,搭建了包括中机身结构与前后机身、机翼和拦阻钩假件的地面模拟试验装置,分析其在地面拦阻冲击载荷下中机身结构的过载和应变响应传递规律;采用刚柔耦合的多体动力学方法对试验工况进行仿真计算,并将仿真结果与试验结果对比分析,验证试验仿真方法的可行性,为机身结构强度设计提供参考,并为后续舰载无人机的拦阻着舰分析以及机身结构响应预测提供依据。
1 试 验
为了解无人机着舰过程中的机身过载分布规律和关键承力结构处的应变响应,本文研究基于某型舰载无人机,首次自主设计了舰载机地面拦阻试验装置,如图1所示。试验件为4090框到7270框之间的中机身段,试验件的尺寸与实物尺寸的比例为1∶1,机身材料主体为铝合金,外形尺寸为:3 232 mm×1 340 mm×1 000 mm。根据后机身、前机身、燃油、机翼的质量和质心设计相关假件,以保证整体质量及重心位置与实际飞机重心位置一致,各部件的质量和重心位置如表1所示。前后机身假件通过高强度螺栓分别与中机身试验件4090框和7270框固定。机翼假件通过在机腹附近预留的螺纹孔与中机身试验件固接。拦阻钩通过可旋转接头与中机身拦阻接头连接。

图1 地面拦阻试验装置示意图
Fig.1 Schematic diagram of ground arresting test device

表1 各部件质量和重心位置Table 1 Mass and center of gravity of each component
1.1 试验方案
考虑到舰载机拦阻过程是一个典型的动态冲击过程,通过撞头碰撞拦阻杆模拟舰载机拦阻钩钩索过程,本试验研究拦阻力对机身结构产生的过载响应。试验机体结构平放于滑轨上,通过前后机身假件下接的4个可移动胶垫实现在滑轨上前后运动。选用 MTS(美特斯)协调加载系统进行试验加载,液压油缸沿航向对张力销产生一个拉力,下传力杆上的内力传递到弹簧储能系统,弹簧沿着航向压缩,带动上传力杆上的顶杆抵住拦阻钩钩头,机身结构沿着航向方向运动。当液压油缸拉断张力销,弹簧迅速回弹,带动传力杆上撞头沿着逆航向方向运动,导致撞头以一个较大的速度差与拦阻钩钩头碰撞,撞头与拦阻钩钩头如图2(a)所示,试验加载系统如图2(b)所示。以这一碰撞过程在拦阻钩头上产生的冲击力代替舰载机着舰过程中拦阻钩钩锁产生的拦阻力。试验连接及加载方式如图3所示。
本文预期在机身结构上达到5g和5.8g这2个极限荷载下的试验设计过载,拦阻杆载荷峰值除以拦阻机总质量3 000 kg得到的过载结果等效为机身极限过载,由试验前期的20%、40%限制载荷的试验数据发现由于冲击过程中冲量的累积造成拦阻杆上的载荷峰值比张力销断裂载荷大。考虑到机身结构的安全和拦阻杆实测载荷与张力销断裂载荷的关系,开展了多种低加载级别的冲击试验,在掌握了拦阻杆实测载荷与张力销载荷的变化规律后,即得到张力销直径大小与机身等效极限过载的关系。本文对5g和5.8g这2种100%限制载荷进行了4 次试验研究,试验载荷如表2所示。

图2 钩头与加载系统示意图
Fig.2 Schematic of hook head and loading system

图3 现场试验
Fig.3 Empirical test
图4给出了拦阻杆上测得的实际拦阻力的时间历程曲线,从图中可以看出拦阻力曲线存在2个冲击峰,第1次冲击经过0.015 s迅速达到拦阻力峰值,衰减0.09 s左右后到零。第2次冲击峰值小于第1次,冲击过程时间在0.15 s左右。

表2 试验载荷工况Table 2 Test load condition
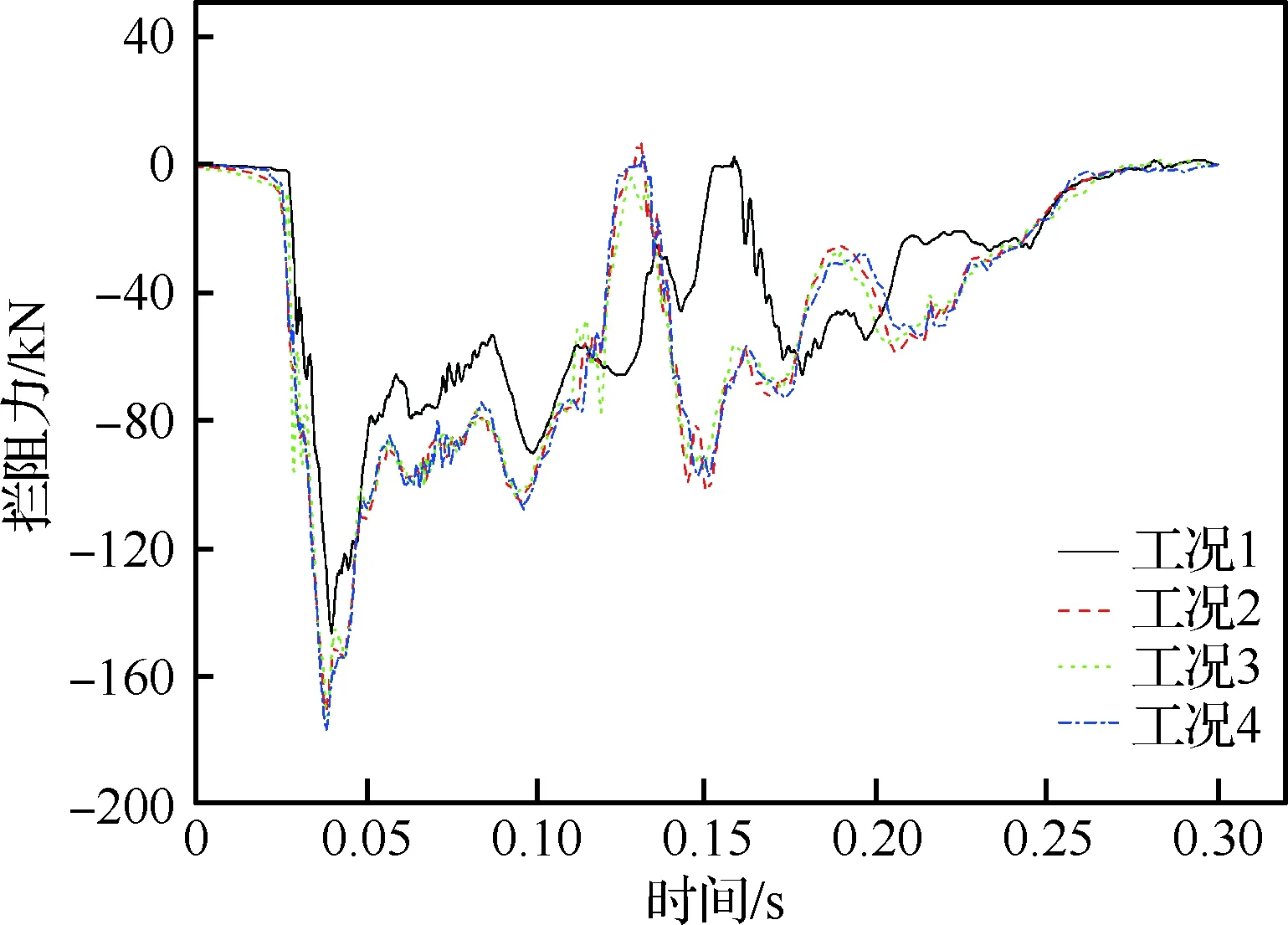
图4 拦阻力时间历程曲线
Fig.4 Time history curves of blocking resistance
结合拦阻力曲线结果与试验加载方式,拦阻力时间历程曲线的第1个峰值对应为拦阻撞头第1次撞击拦阻钩头带来的峰值,时间在0.015 s左右。考虑到试验结构具有较大质量,第1次撞击后对撞头产生一个沿碰撞反方向的运动,然后在弹簧储能系统的带动下继续与拦阻钩头发生2次冲击,即对应为拦阻力曲线的第2个峰值。
1.2 试验结果
为监测试验过程中中机身的动态响应,采用DH5920N动态应变仪和B&K三轴向智能加速度计分别采集试验过程中的应变和过载,本文主要关注中机身结构的航向过载,故后文提到的过载均指航向过载。根据中机身试验件的拦阻接头处存在横梁和斜梁2种主传力结构,在拦阻横梁和拦阻斜梁上分别预设下传力路径和上传力路径。在路径测点上粘贴采样频率为10 000 Hz的三轴向智能加速度传感器和单轴向智能加速度传感器,共23 个,关于航向轴左右对称,其分布位置如图5所示。
为消除采样数据中高频噪声和结构振动的影响,对试验所获得的原始过载-时间历程曲线进行频谱分析,发现过载测点的频谱曲线分布规律基本一致,如图6所示为典型工况3下测点21过载的功率谱曲线。
由于中机身盒段是把各个部件通过铆钉等连接起来,试验装置的边界是在滑轨上,所以在冲击荷载下,过载测点存在高频振动响应。为了消除试验边界和高频噪声带来的影响,对所有过载测点进行高频滤波处理。选取典型工况3中1号测点的原始过载测量数据进行频谱分析,发现其功率谱频域曲线上主要存在500 Hz以下的低通部分和3 400 Hz以上的高通部分,在500~3 400 Hz的频域区间内功率值接近于0值。

图5 加速度传感器位置
Fig.5 Position of acceleration sensor

图6 21号测点的过载功率谱曲线
Fig.6 Overload power spectrum curve of No.21 measuring point
夏益霖和吴家驹[18]提出在阶跃载荷中低频分量占主要成份,从而产生的振动响应以结构的低阶模态响应为主。美军国防部试验室[19]对试验得到的拦阻过程机身过载数据采用低通滤波的方法。拦阻过程中拦阻力变化也是一种阶跃载荷,中机身结构上的振动响应也以结构的低阶模态为主。
考虑到中机身盒段的铆钉连接方式和滑轨边界,认为3 400 Hz以上的高频震动响应为机身结构和试验边界造成的高频噪声结果。采用500 Hz的低通滤波算法,在去除高频噪声的同时,最大限度地保留原始过载响应数据。图7给出了典型工况3中1号测点的原始过载测量数据及滤波后过载-时间历程曲线。
相同的试验环境下,对所有测点的过载-时间历程数据采取同样的滤波处理方式。发现4种工况下,位于拦阻钩接头处的21(22)号点过载峰值均大于其他位置点的测量值,典型工况3下21号测点的过载如图8所示。分析其原因:拦阻力是通过拦阻接头传递到机身结构上的,机身结构阻尼导致在传力路径上存在拦阻力的衰减,造成拦阻接头处的过载明显大于其他各位置点的过载。


图7 1号测点航向过载-时间历程曲线
Fig.7 Heading overload-time history curves at No.1 measuring point
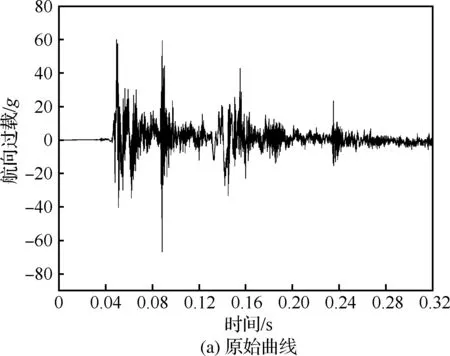

图8 21号测点航向过载-时间历程曲线
Fig.8 Heading overload-time history curves at No.21 measuring point
将各点过载时程曲线与拦阻力时程曲线进行对比,发现各测点过载时间历程曲线趋势基本一致,都存在2个过载峰,与拦阻力曲线中的2次冲击峰对应,过载峰值出现时刻稍滞后于拦阻力峰值时刻,考虑到拦阻杆的长度和机身自身的尺寸,导致拦阻力峰值传递到机身各点需要一定时间。
比较上下2条传力路径上各点的过载峰值出现时刻,发现在各路径后3个点(上路径:测点21-6-7;下路径:测点21-1-2)的过载峰值时刻相邻处相差0.1 ms左右,由于波在铝中的传播速度为5 000 m/s,计算得到传递路程基本与前3个测点的实际航向间距一致。前3个点由于间距在0.75 m,所以其过载峰值时刻相差在0.15 ms左右,验证了试验数据的合理性。
提取4种工况下上、下2条路径上测点的航向过载峰值,发现4种工况下上、下2条路径上航向过载的分布规律基本保持一致,下面给出典型工况3下的上传力路径(测点6~10、21)6个点和下传力路径(1~5、21)6个点的过载峰值分布曲线,如图9所示。从图中可以看出,拦阻冲击试验中机身结构上下2条传递路径上测点的过载峰值沿逆航向呈现出明显的衰减趋势,其中上传递路径的过载峰值从6号测点到10号测点衰减了20%,下传力路径的过载峰值从21号点到5号点衰减了63%。
采用DH5920N动态应变仪进行冲击试验过程中机身上应变数据的采集,在4420框、5850框、6830框、机腹、供油箱、拦阻斜梁、横梁接头和上大梁处粘贴了64 个动态应变片,除拦阻接头处布置有2个花片,这2个贴片方向分别为:0°、90°、45°,其余部位均为沿航向的单片,系统采样频率为5 000 Hz。中机身试验件各梁段与部分动态应变测量点如图10所示。
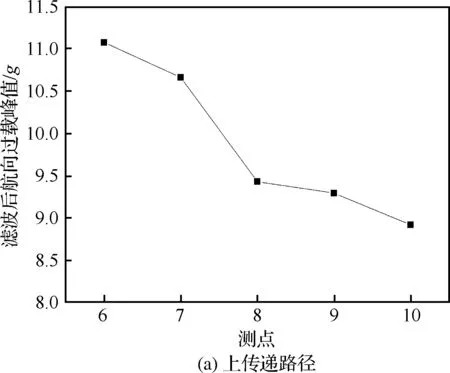

图9 中机身结构航向过载峰值分布
Fig.9 Peak distribution of heading overload in fuselage structure
4种冲击试验工况测量得到的最大应变均出现在机腹梁前段靠近4420框处,节点编号为8027,该处的应变-时间历程曲线如图11所示,4次试验测量得到的应变-时间历程曲线变化规律基本一致,与拦阻力时程曲线对比,发现试验过程中应变与拦阻力时间历程曲线趋势保持一致,试验重复性较好。4次冲击试验测量得到最大应变为工况4下2 895 με,小于材料的许用值4 000 με。

图10 部分应变片分布图
Fig.10 Partial strain gauge distribution

图11 最大应变-时间历程曲线
Fig.11 Maximum strain-time history curves
2 数值模拟
计算多体系统动力学中所研究的多体系统根据系统中的力学特性可分为多刚体系统、柔性多体系统和刚柔耦合多体系统。多体系统动力学分析的建模包括从几何模型搭建物理模型,由物理模型形成力学模型,再由力学模型变成数学模型,求解阶段需要根据分析类型如:静力分析、动力分和特征值分析等选择求解方法。
本文采用刚柔耦合的多体动力学仿真计算方法,把中机身和机翼结构视作柔性体,前机身假件、后机身假件和拦阻钩当作刚体[20],基于机械系统动力学软件ADAMS,联合建模软件CATIA、HYPERMESH和有限元软件PATRAN和NASTRAN,根据地面拦阻冲击试验搭建了刚柔耦合仿真计算模型,模型的材料属性如表3所示。

表3 模型的材料属性Table 3 Material properties of model
具体建模流程是:在CATIA中建好中机身几何模型,导入到PATRAN中划分网格、设置材料属性,定义模态阶数生成BDF文件,提交到NASTRAN中计算得到中机身的固有频率和各阶模态,将模型变形视为由模态线性叠加得到。在构件离散成有限元模型时,要对每个单元和节点编号,以便节点位移按照编号组成一个矢量,这一矢量由多个最基本而相互垂直的同维矢量通过线性组合构成,这里最基本的矢量是模型的模态,体现为各节点位移的比例关系,模态对应的频率是共振频率。单元内部各节点的位移,利用单元的材料属性,可以在模态空间中通过模态线性叠加得到,进而可以计算出构件的应力和应变[21-22]。NASTRAN计算得到机身模态中性文件,再把模态中性MNF文件导入到ADAMS,得到中机身的柔性体,根据全机地面振动试验得到飞机在各阶振型下的结构阻尼系数,在ADAMS中采用FXFREQ函数添加各阶振型阻尼系数,最后得到了含有机身结构阻尼的机身柔性体文件。针对所研究的试验模型特点,首先在CATIA中建立前机身、后机身和机翼假件与拦阻钩几何模型,在HYPERMESH中设置重心点后生成STP文件,导入到ADAMS中得到相关刚体部件,通过预先设置的INT-NODE点使用固定副把刚体与柔性体连接起来。使用4个平移副代替前后机身假件在滑轨上相对运动的胶垫,根据试验测试得到2 800 kg的机身在滑轨上运动所需要的推力,设置静摩擦和动摩擦系数分别为0.06和0.05。模拟机身运动过程中与滑轨之间的摩擦力。最后装配完整的刚柔耦合仿真计算模型,如图12所示。
把试验测得的4种工况的拦阻力进行光滑处理,消除毛刺后导入ADAMS,通过SPLINE函数在拦阻钩头处施加拦阻力,方向沿着拦阻钩的轴向,对表1所示的4种试验工况进行仿真计算,仿真拦阻力曲线如1.1节中图4所示。
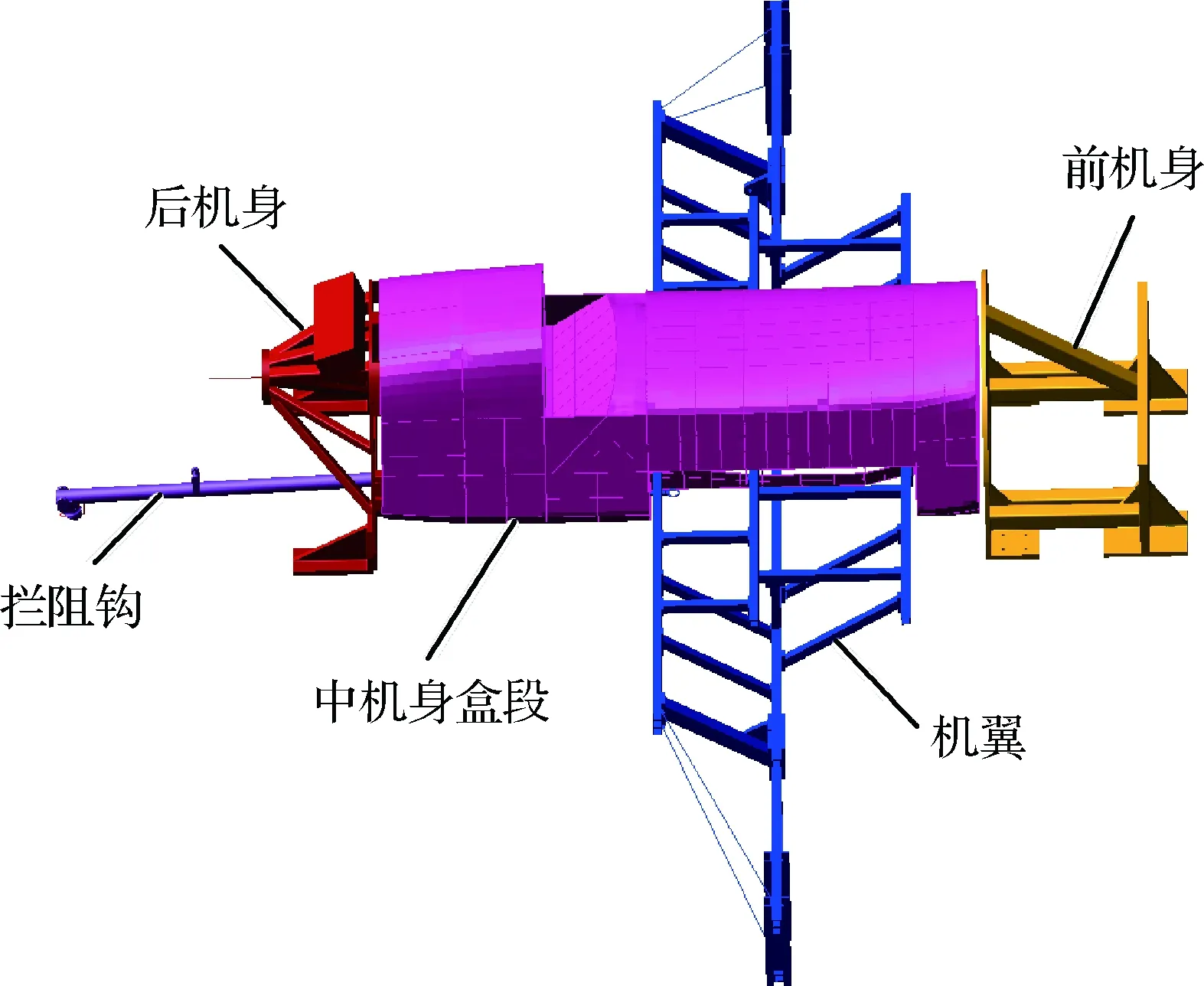
图12 刚柔耦合模型
Fig.12 Rigid-flexible coupling model
3 试验与仿真对比
得到4种工况下模拟的中机身过载和应变结果,并将试验数据与仿真结果进行对比分析。
3.1 过 载
通过结果对比发现机身23个测点在试验和仿真下的过载时程曲线接近,图13为关键位置1号测点与21号侧点(拦阻接头)在典型工况3下的试验测量与仿真计算得到的航向过载-时间历程曲线。从对比曲线可知,仿真计算得到的机身测点的航向过载峰值与变化趋势基本和试验数据一致,试验测量结果与仿真计算得到的最大过载误差在5%左右;仿真过程中机身建模简化和试验件连接部位存在的缝隙造成试验环境下冲击能量衰减速率高于仿真结果,产生试验过载曲线较数值仿真结果衰减更快的现象。
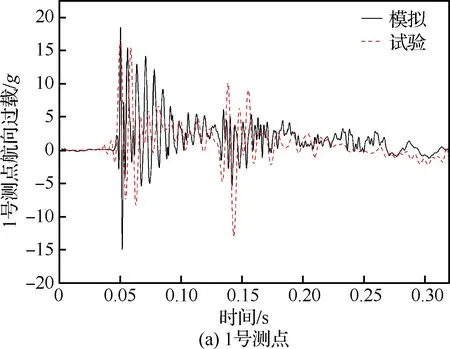
图13 关键位置点航向过载对比曲线
Fig.13 Comparison of heading overload at key position points
上传递路径测点6~10和下传递路径测点1~5、21的过载时间历程曲线变化趋势基本与测点1和21相同,只是过载峰值不一样。对3次相同试验(工况2、3和4)得到各点的过载取平均值,再与模拟数据对比,如图14所示,图14(a)为上传递路径(测点21、6~10)的过载峰值,图14(b)为下传递路径(测点1~5)的过载峰值。从图中可以看出中机身过载峰值最大处位于拦阻接头处,机身上的过载峰值会沿着逆航向衰减。从拦阻接头(测点21与22)到左右两侧横梁(测点1与11)存在航向过载的骤降,下降幅值达到11.5g,减少了40.7%左右。由于冲击过程中所有能量首先经过拦阻杆传递到拦阻接头处,造成拦阻接头处的航向过载最大。当冲击能量达到拦阻接头所在6830框时,通过6830框与6400框之间的主传力结构拦阻横梁和斜梁传递到6400框段。传递过程把拦阻接头处的能量分为主要的3部分,最主要的一部分能量集中在机身下路径上,第2部分能量转移到机身上传递路径上,最后一部分能量转化为机身垂向的过载,试验测得最大垂向过载峰值为0.5g,机身垂向的过载峰值相对航向过载较小。
观察下传递路径6号测点到10号测点之间的过载差值,发现其各点之间的差值接近,过载峰值大小趋势都是从后机身到前机身方向逐渐减小。下传递路径的最小过载点位于5号和10号测点,上传递路径的最小过载点位于10号和20号测点,中机身结构的最小航向过载位于液压附件舱的纵框上。


图14 模拟与试验过载峰值对比曲线
Fig.14 Comparison of simulation and test overload peak
3.2 应 变
对比试验与仿真2种环境下的测点应变结果。换算得到最大过载危险点拦阻接头处的主应变,主应变计算方法为
(1)
式中:ε0°、ε45°、ε90°分别为0°、45°和90°的应变。
图15所示为在试验与仿真2种环境下,应变花测点换算得到的最大主应变和最小主应变时程曲线对比图,节点编号为129056。发现仿真结果得到的应变-时间历程曲线变化规律与试验数据吻合较好,峰值基本一致,应变变化趋势与试验拦阻力曲线变化规律相同,最大主应变峰值为580 με拉应变,最小主应变为560 με压应变。
对机身分布应变进行分析,得到如图16所示典型工况3下试验与仿真的机腹梁前段、中段、后段和供油箱、拦阻横梁处的应变对比时程曲线。

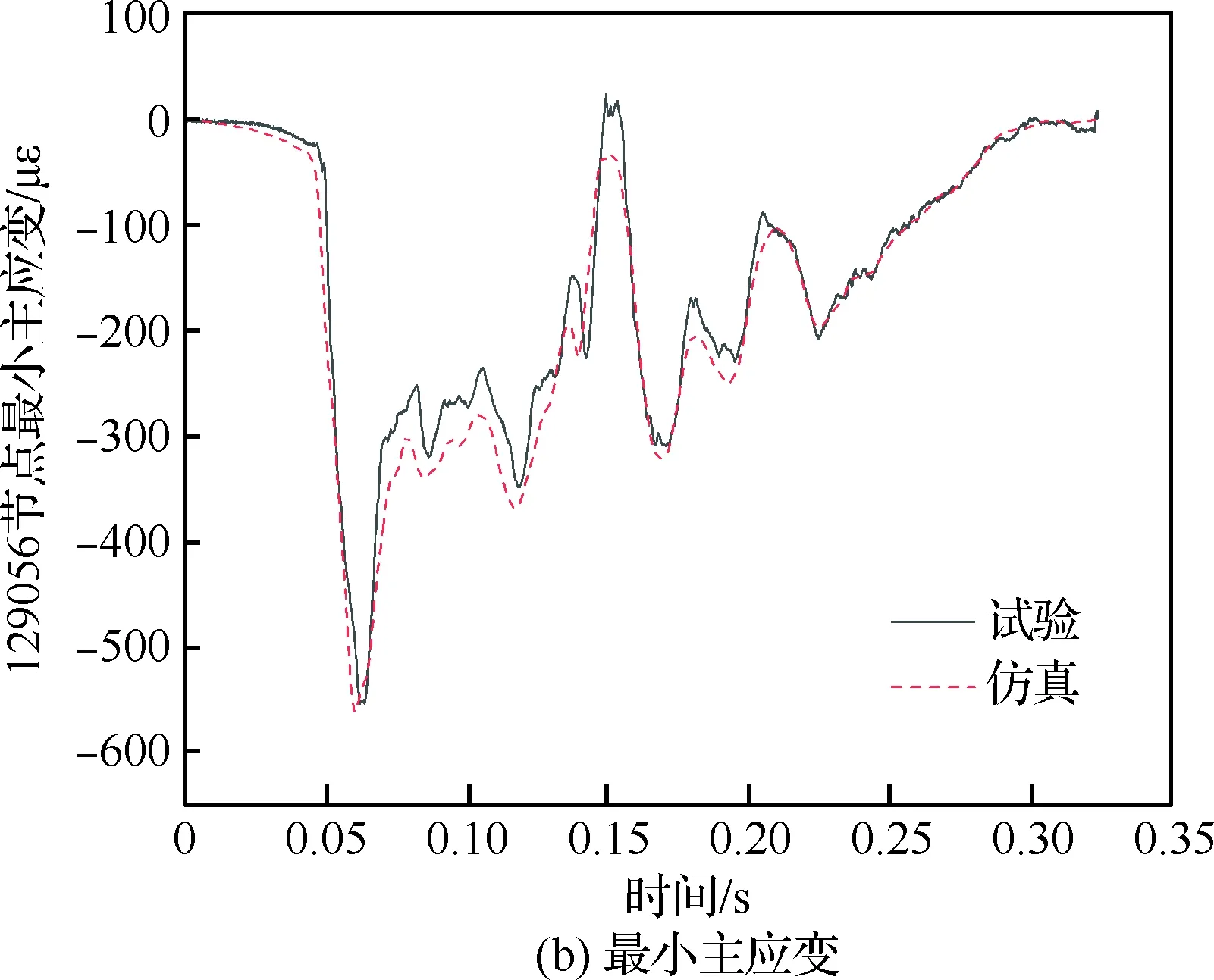
图15 拦阻接头主应变时间历程曲线
Fig.15 Main strain time history curves of blocking joint


图16 机身部分应变点时间历程曲线
Fig.16 Time-history curves of strain point of fuselage
仿真测点的中机身应变最大值仍然在机腹梁前段靠近4420框处,与试验结果保持一致;对比机身其他位置点的试验与仿真应变曲线,发现其峰值误差都在8%以内,应变峰值出现时刻吻合。试验与仿真的应变变化规律在拦阻接头处吻合最好,从拦阻接头向前机身方向,应变测点的吻合度逐渐降低,分析其原因:仿真分析过程中,机身建模存在一些结构简化,局部刚度与实际机身刚度存在偏差;仿真的机身阻尼与试验过程中机身的结构阻尼不是完全一致;在拦阻接头到前机身路径上,建模简化与结构阻尼带来的误差逐渐累积,造成仿真与试验的应变变化规律偏差变大。
3.3 应 力
选取拦阻力最大工况4的仿真结果进行应力分析,图17给出了中机身下传递路径上应力测点的位置分布、峰值分布和部分测点时间历程曲线图。



图17 应力结果
Fig.17 Stress results
从应力峰值分布曲线可知,拦阻接头处的应力峰值最大,达到328 MPa,小于机身主体材料7075T7351的许用应力510 MPa,确保拦阻过程中机身结构安全;中机身下传递路径上的 应力峰值沿着逆航向逐渐衰减,供油箱壁板上的7、8号测点的应力峰值明显比其他测点小,分析其原因:发现其他测点都是在纵梁上,相对于7、8号测点所在的壁板,在几何形状上存在相对应力集中,造成供油箱壁板上的应力峰值明显比其他测点的峰值小。
测点的应力时间历程曲线变化规律和拦阻力曲线保持一致。在2次冲击峰下,存在2个应力峰与2个拦阻力峰一一对应,在第1个应力峰达到应力最大值。仿真应力曲线与试验拦阻力曲线变化规律基本相同,进一步验证了仿真方法的可行性。
4 结 论
本文对某型舰载无人机进行地面拦阻冲击试验,得到中机身结构上下路径的过载传递规律和机身测点的应变危险点位置。通过对比数值仿真得到的动态响应结果,得出以下结论:
1) 基于地面拦阻冲击试验,发现中机身结构上下2条路径的航向过载峰值沿着逆航向衰减。机身左右对称点的过载峰值吻合较好。过载峰值最大点位于拦阻接头处,在拦阻力峰值为 176.8 kN时,过载峰值最大达到27.9g。得到机身结构应变和过载分布规律,为舰载无人机结构设计提供参考。
2) 将4种工况下的仿真结果与试验数据对比,发现机身测点的仿真过载峰值与变化趋势基本和试验数据一致,最大过载误差在5%左右,应变误差在8%以内,中机身上关于航向轴左右对称测点的过载和应变结果基本一致。表明刚柔耦合多体动力学方法研究舰载机拦阻着舰问题的可行性,同时也验证了试验数据的可靠性。
3) 对比上下路径的过载峰值,发现拦阻接头处冲击能量通过主传力结构拦阻横梁和斜梁向6400框传递。这个传递过程把拦阻接头处的冲击能量分为3部分,最主要的一部分能量仍然集中在机身下路径上,第2部分能量转移到机身上传递路径上,最后一小部分能量转化为机身垂向的过载,造成同一框上的上路径测点明显比下路径过载值小,同一测点的航向过载远大于法向过载值。
4) 分析试验和仿真得到的应变和应力峰值,发现应变危险点位于机腹梁前段靠近4420框处,4次冲击试验测量得到最大应变为工况4下2 895 με,小于材料的许用值4 000 με。仿真得到的应力峰值最大为328 MPa,低于材料的设计许用值;应变和应力的峰值持续时间短暂,只维持0.2 ms左右,表明在极限过载5g和5.8g下,拦阻冲击不会对机体结构产生损伤和破坏,中机身机体结构设计安全。
