基于加速动态拉格朗日法的摩擦片阻尼分析
2019-12-27马皓晔李琳范雨吴亚光
马皓晔,李琳,2,范雨,2,*,吴亚光
1. 北京航空航天大学 能源与动力工程学院,北京 100083 2. 北京航空航天大学 航空发动机结构强度北京市重点实验室,北京 100083
结构振动普遍存在于航空、航天、船舶等工程领域[1]中。过大的振动会导致结构的高周疲劳甚至失效,而增加阻尼是降低振动的有效方式。虽然对新型阻尼器的研究长盛不衰(如压电分支阻尼技术[2-5]),但基于摩擦耗能原理的干摩擦阻尼器由于具有结构简单、可靠性高、减振效果明显且受温度影响较小等优点,仍是最常用且最受关注的阻尼技术之一[6-8]。在现役航空发动机中,就有多种形式的干摩擦阻尼器,如叶冠、叶片凸肩、缘板阻尼器、阻尼环等[9-12]。随着未来飞行器对更高的推重比的追求,将进一步大量采用薄壁结构,这必然会导致更为突出的结构振动问题[9]。然而针对适用于一般薄壁结构的干摩擦阻尼器的研究尚不多见。
设计干摩擦阻尼器的关键技术之一是发展含接触环节的非线性动力学模型及其求解方法。如果主要关注的是一类干摩擦系统的普适动力学行为,则常用集总参数模型,即将结构用少数几个质量和弹簧的组合表征。研究人员已经用这类模型探索了叶根阻尼器[13]、缘板阻尼器[14-16]、针对齿轮扭振的单个[17]和多个[18]阻尼环。集中参数模型的自由度很少,数值问题不突出,因此适合用于机理性研究或算法的合理有效性研究[19-20]。
如果主要关注的是具体的干摩擦阻尼器及其对所施加结构的减振效果(尤其是针对多个高阶模态时),则应考虑使用高保真有限元模型。例如,张大义等[21]基于实体有限元模型建立了缘板阻尼结构的设计流程和优化方法,并给出了结构设计合理性的评估参数。Petrov和Ewins[22]利用高保真有限元模型分析了带冠叶片的强迫响应,并对屋顶形阻尼器(Cottage Roof Dampers, CRDs)与分离式阻尼器(Split Dampers, SDs)的减振性能进行了比较[23],并说明相比于CRDS,SDs对质量参数的变化不敏感。Charleux等[24]将榫接叶盘结构强迫响应的试验与仿真结果进行对比,说明了利用高保真模型来预测带接触系统的振动特性是可行、可信的。高保真模型的自由度数一般较大,使得直接进行时域积分变得非常耗时,这就需要发展减缩模型和高效的频域求解算法。目前常用动力凝缩和子结构方法减缩线性自由度的规模[25-26]。对于非线性自由度,可以在谐波平衡的框架内利用周期对称性对叶盘等循环周期结构上的接触点数目进行减缩[27];或对于一般结构,Krack等[28-29]还发展了非线性模态减缩技术,用以计算失谐榫接叶盘的强迫响应。目前最常用的频域求解方法是谐波平衡法,即通过傅里叶变换将对非线性常微分方程的求解转换为对非线性代数方程组的求解。即使针对集总参数模型,其计算效率远高于时间积分法[30](CPU时间只是后者的约1%),但随着自由度数的增加,谐波平衡法也面临多个数值问题,其中的一个主要问题是用数值差分求雅克比矩阵的误差导致牛顿-拉夫逊迭代难以收敛[31]。
本文提出一种适用于一般薄壁结构的波纹形干摩擦阻尼器,具有适用性强、正压力调节方便、易于安装等特点;并利用高保真有限元模型计算其频响特性,展示其阻尼性能随安装螺栓压紧力的变化规律。在计算方法上,采用了加速动态拉格朗日法对强迫响应进行预测,并给出了解析形式的雅克比矩阵,使算法的精度和速度得以大幅提升。通过集中参数模型的算例说明了理论推导及程序编写的合理与正确性。利用一个四边固支的平板结构来说明波纹形摩擦片的阻尼性能。
1 波纹形摩擦阻尼片
本文所考虑的波纹形干摩擦阻尼片如图1所示。阻尼片的2个接触面对称分布在安装面两侧,通过振动时接触面与底部承载结构之间的相对运动产生的摩擦来达到减振的目的。安装面利用螺栓与螺母进行固定。
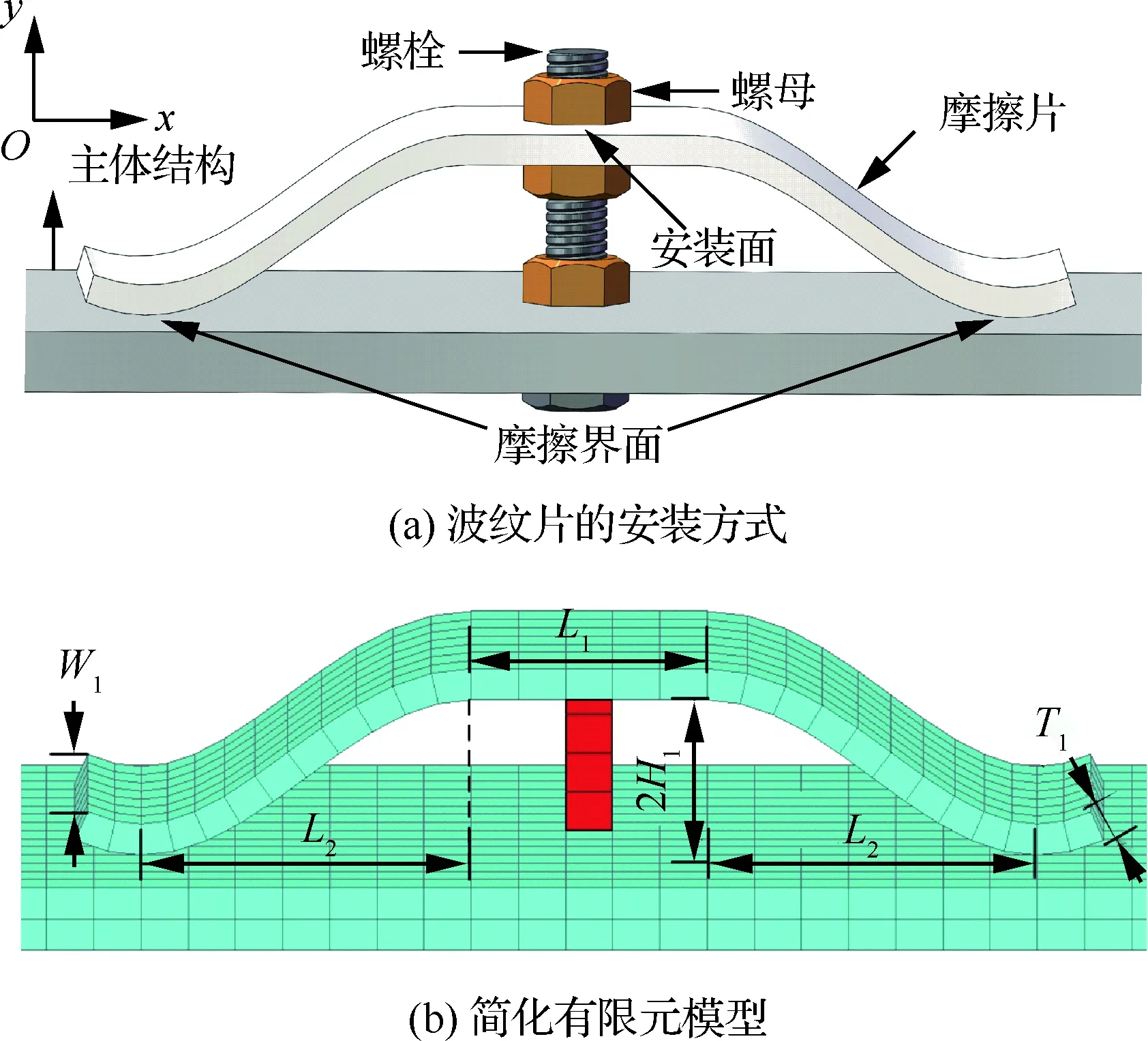
图1 波纹形干摩擦阻尼器示意图
Fig.1 Illustration of corrugated frictional patch
接触面的正压力是干摩擦阻尼器设计时的关键参数,对干摩擦阻尼器的性能有着显著的影响。当正压力过小时,接触面产生的切向力较小,导致由摩擦损耗的能量较小;当正压力过大时,由于接触面之间的相对滑移量减小,使得减振性能下降;当正压力增大到使得接触面达到“完全阻滞”状态时,此时干摩擦阻尼器只有微小的调节固有频率的作用,而不具备阻尼作用。对于图1(a)所示的阻尼器,可以通过改变螺栓的拧紧程度来调节接触面上的正压力。
在对波纹形阻尼器的减振特性进行分析时,采用了如图1(b)所示的有限元模型。其中T1、W1分别代表阻尼片的厚度与宽度。摩擦片的轮廓线(在xOy平面的投影)关于中心(安装点)对称,共由3段曲线构成:中间段为长为L1的直线,左右2段均为余弦曲线,满足如下关系:
(1)
式中:L2为半波长;H1为波的峰值。直线段分别与两边的余弦曲线段相切。工作过程中会通过拧紧安装面两侧的螺母来减小非摩擦界面处的相对运动,此时安装面近似于固支状态,因此在有限元分析中,螺栓与螺母结构可用图1(b)中位于安装面区域内连接摩擦片与主体结构的实体单元来代替。接触节点位于阻尼片下侧的接触面上,它们与主体结构上对应的节点重合。
接触节点之间的相对运动相比于整体结构的振动幅值较小,因此可以采用点对点式的接触单元来描述微滑移运动,如图2所示。该模型又被称为三维接触运动模型,其中FN代表法向正压力,由接触对之间沿法向的相对位移决定,因此其能够考虑由于自身形变所导致正压力改变;FT1与FT2分别代表接触平面上2个正交方向的摩擦力,在计算中认为它们是互不影响的[32]。该模型能够完备地描述三维空间中接触对之间的运动关系,在对高保真有限元模型研究时应用较为广泛[22-23,26]。

图2 三维接触运动模型示意图
Fig.2 Illustration of 3D contact movement model
2 干摩擦结构响应的快速预测
为了展示波纹形干摩擦阻尼片的减振效果,用频响函数的峰值作为评价指标。为此,采用了基于时频转换(Alternating Frequency-Time domain, AFT)的速度型动态拉格朗日法[26](Dynamic Lagrange Frequency-Time method, DLFT)。相比于以迟滞弹簧模型为基础的强迫响应预测算法[27],DLFT的主要优点为:① 不需要确定切法向弹簧刚度的值,同时计算结果对引入的惩罚系数的值不敏感[33];② 时域内不需要通过迭代来使得非线性力满足周期条件[34]。在此基础上,引入了解析形式的雅克比矩阵使得算法的计算效率与收敛稳定性大幅提升。
2.1 高阶谐波平衡法求解非线性动力学方程
对于带有干摩擦阻尼的非线性系统,其离散形式的动力学方程可以写为
(2)
式中:M、C和K分别为质量、阻尼和刚度矩阵;qex(t)为外激振力向量,在本文中仅考虑其为时间的简谐形式;qnl(t)代表作用于摩擦界面处的非线性干摩擦力,包括了切向与法向分量;u(t)为位移向量;上标(·)代表对时间的一次求导。直接在时域内求解式(2)这样的2阶非线性微分方程组将会耗费大量时间,尤其当自由度较多且求解的是稳态响应时,计算时间成本将迅速增加。故本文在频域内采用高阶谐波平衡法求解式(2)的稳态强迫响应。
高阶谐波平衡法的出发点是将位移、外激励和非线性力表示成傅里叶级数,并截取前Nh项。因此,位移项u(t)可写为

(3)

(4)

(5)

(6)
由于ejnωt≠0,因此只能前面括号里的向量为零,从而获得一组非线性代数方程组:
(7)
式中:H(n)为第n阶谐波的动刚度矩阵,即
H(n)=-(nω)2M+jnωC+K
(8)
在解该非线性代数方程组时,一般常用“牛顿-拉夫逊”迭代法以及其改进方法[15]。然而随着方程自由度的提高,计算效率与稳定性都会明显下降。注意到相对于整个结构系统,接触面只占很小一部分,因此本文进行自由度凝缩,以减少迭代时方程的自由度。首先,将式(7)中的向量和矩阵分成线性自由度(下标l)与非线性自由度(下标nl):
(9)
再通过凝聚,仅保留非线性自由度:
(10)
(11)
这样,总自由度从(Nl+Nnl)×(Nh+1)变为Nnl×(Nh+1),其中Nl和Nnl分别为线性自由度数与非线性自由度数。

(12)
式中:S(n)=[D(n)]-1。对于任意一组接触点,引入相对位移:
(13)
联立方程式(12)与式(13),则动力学方程组可最终表示为相对位移的形式:
(14)
其中:
(15)
由此,方程组的自由度数进一步降低到原来的一半,即Nnl×(Nh+1)/2。在对式(14)进行求解时,一般将其写为收敛残差的形式,即
(16)

2.2 速度型动态拉格朗日法求解非线性力

(17)
并用如下关系计算非线性力:
(18)

式(17)可以看做是在式(14)的基础上,分别在切向(下标T)引入了一个关于相对速度的惩罚项以及在法向(下标N)引入了一个关于相对位移的惩罚项,其中ε为惩罚系数。
(19)
利用傅里叶逆变换,将式(19)的每一项都变换到时域,此时每个自由度的运动都被离散至Ns个时间点上,其中任意第l个时间点下的拉格朗日乘子λ(l)可表示为
λ(l)=λu(l)-λx(l)
(20)
注意此时实际上已知的是λu,λ和λx暂时是未知的,采用下面的预测-修正方法求得。
对于任意接触点k,首先假设其在时间步l处为阻滞状态,即2个接触点之间没有相对运动,因此kλx(l)=0,得到非线性力的预测值:
kλpre(l)=kλu(l)
(21)
再利用库伦摩擦定律来判断该点的真实接触状态,并用kλx(l)对非线性力进行修正,共有如下3种情况:
1) 分离:|kλpre,N(l)|+|N0|≤0,其中N0代表施加在接触点上的初始正压力。此时接触对之间不存在接触力的作用,即kλ(l)=0,此时:
kλx(l)=kλu(l)
(22)
2) 阻滞:|kλpre,N(l)|+|N0|>0,同时切向力|kλpre,T(l)|<μf|kλpre,N(l)+N0|。其中μf代表接触面的摩擦系数。满足此条件时,说明当前的接触状态与预测结果相吻合,无需对非线性力进行修正,即
kλx(l)=0
(23)
3) 滑移:|kλpre,N(l)|+|N0|>0,同时切向力|kλpre,T(l)|≥μf|kλpre,N(l)+N0|。此时法向接触点之间相对位移的值为0;切向存在相对运动,且根据库伦摩擦定律,切向摩擦力的大小可表示为μf|kλpre,N(l)+N0|,方向与相对速度的方向一致,因此可以得到滑移状态下的修正项:
(24)

需要注意的是,基于牛顿-拉夫逊法的迭代方法为局部收敛法,即当给的初值与方程的解较接近时,该方法具有较强的数值稳定性,反之方程容易不收敛。因此在求解频域内的强迫响应时,可以采用自适应步长的自然延拓法从小到大进行扫频计算,并以上一个频率点的迭代收敛解作为计算下一个频率点强迫响应的迭代初值。对于第一个频率点,一般将远离共振峰处系统不受非线性力作用下相对位移的频域值作为迭代初值。
2.3 用解析雅克比矩阵加速计算
在利用牛顿-拉夫逊法以及其改进方法进行迭代时,其中必要的一步则是用非线性代数方程组式(15)的雅克比矩阵来判断下一次迭代的值,在MATLAB中用fsolve函数解非线性方程组时,默认情况下该矩阵一般通过有限差分法给出。然而当方程中的非线性自由度数较大时,利用数值差分计算雅克比矩阵的时间成本较大,且精度也较低。如果能给出解析形式的雅克比矩阵,就能够有效地解决这一问题[27]。因此,给出适用于速度型动态拉格朗日法的解析雅克比矩阵。
对于收敛残差形式的运动方程(16),其雅克比矩阵可写为
(25)
式中:Dr直接通过式(15)计算得到,因此计算J的关键就在于求解拉格朗日乘子对于相对位移矢量的偏导。利用求导的链式法则,式(25)的第2项写为
(26)
其中:
(27)
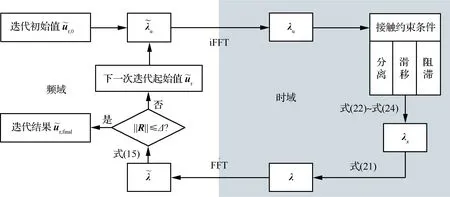
图3 基于时频转换的动态拉格朗日法流程
Fig.3 Flowchart of DLFT based on time-frequency conversion
(28)
(29)
(30)
∂kλx,N(l)/∂hλu,T(l)的值为0。另外2种情况则为切向的修正项关于切向的预测项的偏导∂kλx,T(l)/∂hλu,T(l):
(31)
以及切向的修正项关于法向的预测项的偏导∂kλx,T(l)/∂hλu,N(l):
(32)
(33)

(34)
通过式(25)~式(34)即可获得雅克比矩阵的解析表达式,从而提高利用DLFT法预测系统强迫响应的计算效率与数值稳定性。
2.4 计算流程简述
图4给出了针对具有摩擦片的有限元模型强迫响应预测算法的计算流程,概述如下:① 利用标准有限元软件(本文使用ANSYS)对带有波纹形干摩擦阻尼片的结构的线性部分进行建模;② 提取系统的刚度矩阵K、质量矩阵M与阻尼矩阵C;③ 对得到的K、M、C矩阵进行固定界面模态减缩,仅保留少量的主节点自由度。值得注意的是,该减缩仅在生成待求解代数方程组的过程中进行一次;④ 将方程的自由度凝聚到非线
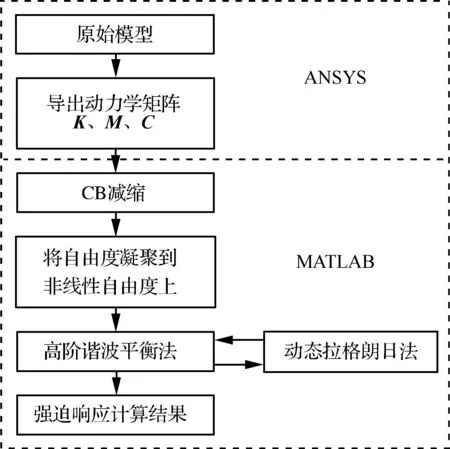
图4 基于减缩模型的DLFT计算流程
Fig.4 Flowchart of DLFT based on reduced order model
性自由度上,进一步减少计算规模;⑤ 利用图3所示DFLT法求解非线性力的大小,在该步骤中采用时频转换技术,即先将频域获得的位移转化到时域,并在时域内对非线性力进行修正,再将修正的非线性力转回频域;⑥ 将非线性力代回运动方程式(10),得到观察点的强迫响应计算结果。
2.5 程序正确性测试
对于2.4节计算流程,可以通过如图5所示的具有2个摩擦面的集中参数模型,将计算结果与基于切/法向刚度的时频转换技术(Elastic Frequency-Time technique, EFT)的结果进行比较,从而说明程序的正确性。
图5中的模型分为上下2个结构,不同结构的质量块之间存在接触。在验证模型中,每一个接触点包含1个切向与1个法向。在上结构中,每一个质量块受到大小为F的激振力激励。模型中各参数的取值如表1所示。

图5 带有接触面的集中参数模型
Fig.5 Lumped parameter model with contact interfaces
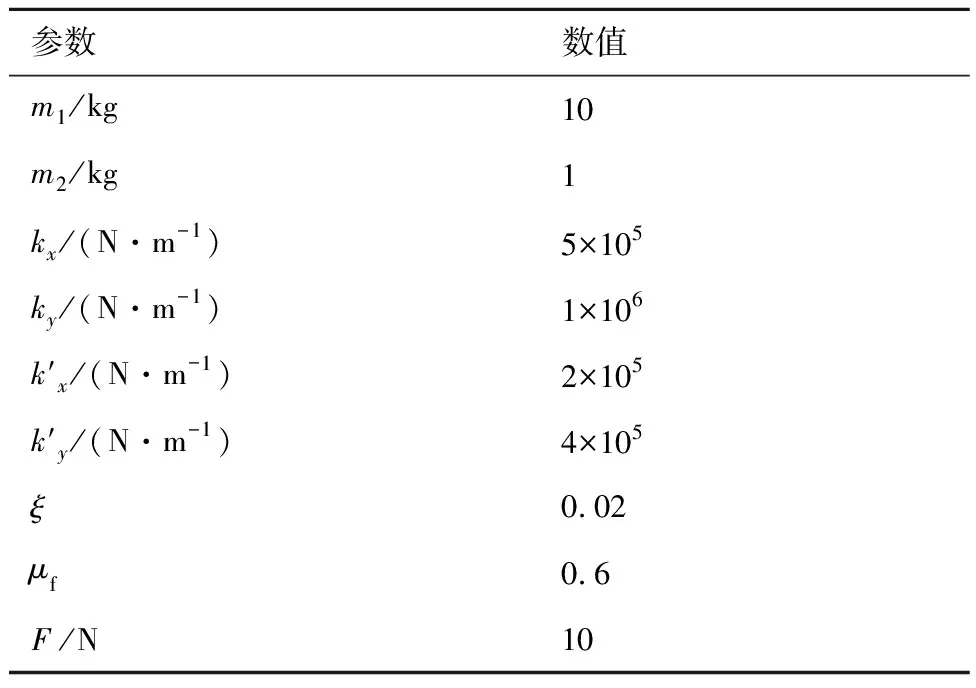
表1 带有接触的集中参数模型参数
利用切向/法刚度法验证速度型动态拉格朗日算法的正确性时,用如图6所示的考虑接触刚度的迟滞库伦摩擦模型来描述接触面的力学特征。该模型认为在阻滞状态下,由于力的作用,接触点之间仍存在一定的弹性变形,并通过引入切/法向弹簧来描述这一特征。在验证模型中,切向弹簧与法向弹簧的刚度分别为kt,kn=1×107N/m。
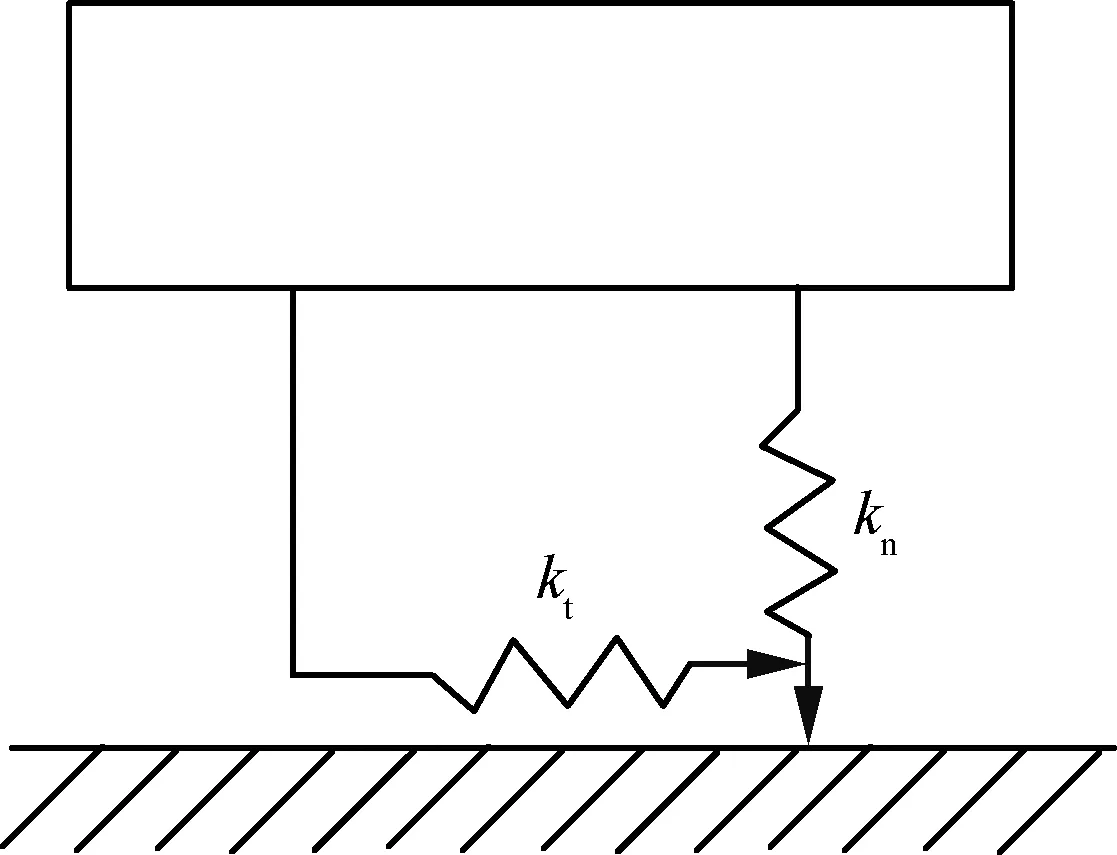
图6 二维迟滞弹簧接触模型示意图
Fig.6 Illustration of 2D contact model with hysteresis springs
分别利用速度型动态拉格朗日法与切/法向刚度法计算该模型在不同正压力下的强迫响应,其中观测点为质量块1沿着x方向的位移,同时上述2种方法都是基于解析雅克比矩阵的。两者的结果对比如图7所示。
图7中标注的离散点为利用基于切/法向迟滞弹簧模型的NewMark法直接在时域内求得的特定频率下的响应幅值。从图7可以看出,利用切向/法向刚度法与速度型动态拉格朗日法的计算结果十分相近,其中存在的微小的差异是由于DLFT在时域上是利用不考虑迟滞弹簧的库伦模型去满足接触约束的。该计算结果与文献[33]中描述的现象相吻合。在计算时间上,以图7为例,利用速度型动态拉格朗日法得到一条稳态响应曲线平均所用的CPU时间为145.3 s,而利用切/法向刚度法平均所用的CPU时间为638.7 s,可见在计算结果近似的情况下,前者的计算效率要明显高于后者。
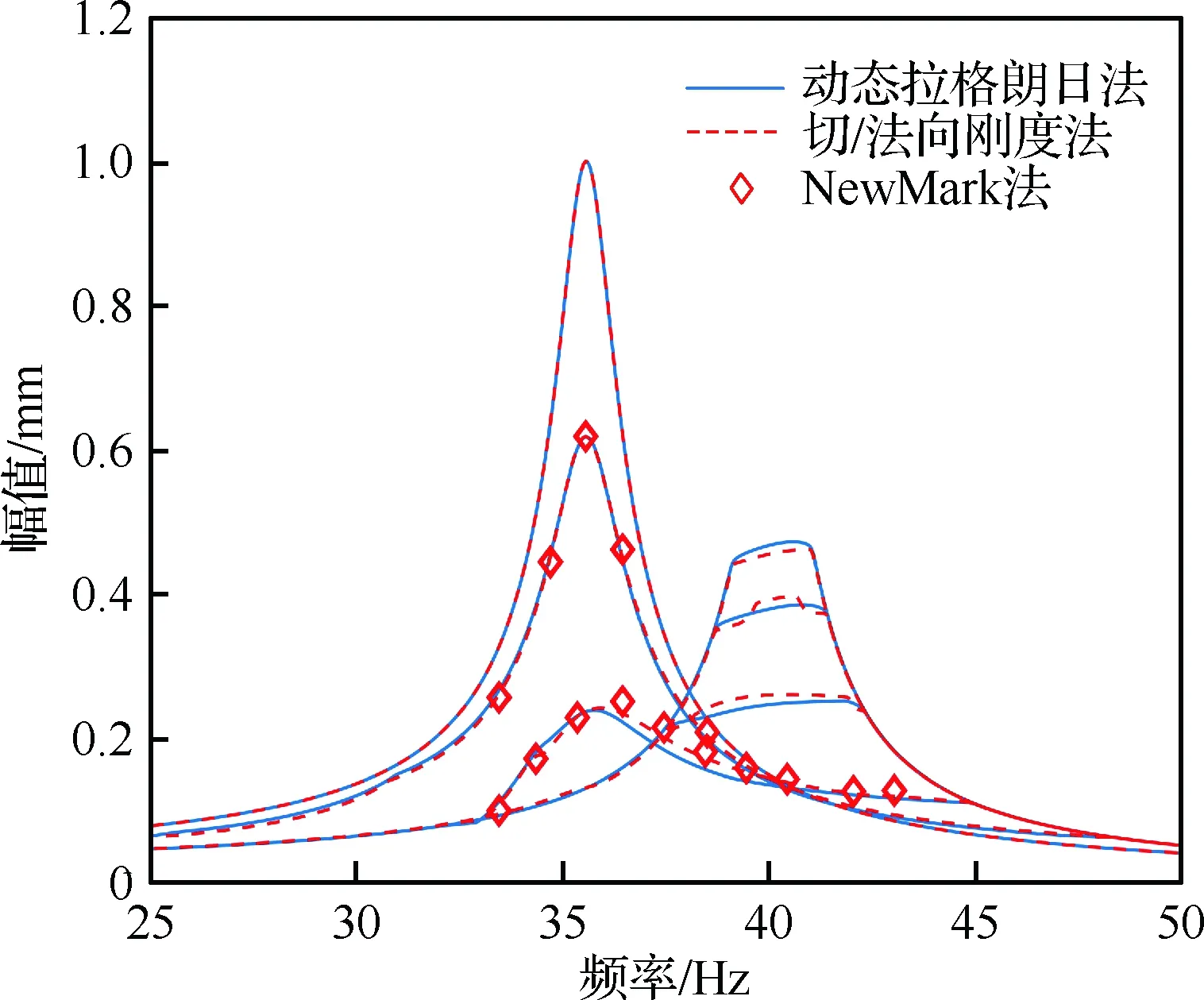
图7 不同算法下强迫响应曲线的比较
Fig.7 Comparison of forced response curves using different algorithms
3 波纹摩擦片的减振效果分析
本节将用上述数值工具研究波纹形摩擦阻尼片对于薄壁结构的减振效果。注意到,干摩擦阻尼器的减振效果与系统在全阻滞与全滑移状态下的共振频率差相关。一般来说较大的频率差对应着较好的减振性能[37]。因此阻尼片应该布置在能够明显调整主体结构在目标频带内的固有频率的位置上。
平板结构为一种具有代表性的薄壁结构,本节通过在一块405 mm×405 mm,厚度为2 mm的板上布置波纹形干摩擦阻尼片,利用仿真模拟的手段研究阻尼片减振性能。板由钢构成,其材料参数为:弹性模量E=210 GPa,泊松比μ=0.3,密度ρ=7 800 kg/m3。边界条件为板的四边全部固支。
将第5阶模态作为目标模态,研究阻尼片对于由此模态所主导的振动的减振效果。其模态频率为400.47 Hz,模态振型如图8所示。将4片阻尼片布置到如图9所示的位置,每片阻尼片都对应平板四条边的中点,且其中一个接触面位于固定端3 mm处。阻尼片的材料参数为:弹性模量E=70 GPa,泊松比μ=0.3,密度ρ=2 700 kg/m3。

图8 四边固支板的第5阶模态振型
Fig.8 Modal shape of the 5th mode of four side fixed plate
阻尼片的几何尺寸如表2所示。为激起该阶模态,在图9中的施力点位置施加垂直于板方向的激振力,大小为F=15 N,同时相邻2点之间的激振力存在π/2的相位差。
图9 带有4个阻尼片的板结构
Fig.9 Plate with four frictional patches attached
在分析时,首先建立图9中含有阻尼片的板结构的有限元模型(利用ANSYS);再用固定界面模态减缩来降低模型的自由度,保留其中施力点与观测点的线性自由度,以及接触面上的所有非线性自由度。为保证计算精度,截取前50阶模态,由此得到的降阶模型前10阶的模态频率与原模型相比,误差小于0.5%,且模态振型相似性约等于1,故可以用此降阶模型的计算结果来替代原模型。
利用DLFT方法对上述模型进行计算,模型本身的阻尼比取ξ=0.002,文献[38]中表明摩擦系数的大小对干摩擦阻尼器的最优减振效果并不敏感,这里该参数的取值为μf=0.6。为保证计算精度,本文中保留的谐波数为Nh=5,计算得到如图10所示的不同正压力下观测点的稳态强迫响应曲线。随着正压力的增大,共振频率向右偏移,完全自由状态下的共振频率为400.6 Hz,与纯平板结构下的固有频率变化不大,说明当阻尼片布置在该位置时,其附加质量对整体结构的动力学特性几乎没有影响。当接触面处于完全阻滞状态时,共振频率为408.4 Hz,频率偏移量为7.8 Hz。共振幅值随着正压力的增加先减小,后增大。当初始正压力为80 N时,阻尼片的减振性能最佳,共振幅值相对于完全分离状态下降了75.4%。同时,阻尼片的质量(考虑了安装所用的螺栓和螺母)占主体结构的0.6%。由此可见,该波纹形干摩擦阻尼器对于平板结构具有较为理想的减振性能。
还可以对接触区域的局部动力学特性进行分析。以图9中箭头所指的接触点为例,在初始正压力为80 N下达到共振峰时,该接触点在时域内的运动状态如图11所示。其中实线代表接触点处所受的切向摩擦力,虚线代表接触对之间的切向相对位移。当接触状态为阻滞时(阴影部分),接触对之间的相对位移保持不变;当接触状态为滑移时,由于切法向运动耦合的影响,导致切向的摩擦力并不是定值。
关于计算效率,以最优正压力下计算强迫响应为例,所用的时间与减缩过程中系统的自由度的变化如表3所示。可见构造减缩模型所耗费的时间只占总分析时间的很小部分,却能有效地降低模型的自由度(降低了99.7%),因此推荐在用DLFT分析较大规模的有限元模型时使用减缩技术。如果不采用解析雅克比矩阵而是用默认的数值差分近似,平均一个频率点所需的CPU时间为333.7 s;采用减缩方法后,计算706个频率点总共花了5 360.1 s,平均每1个频率点的CPU计算时间为7.6 s。可见如式(25)~式(34)所示的解析雅克比矩阵对速度型的动态拉格朗日法的计算效率至关重要,在计算自由度相对较多的结构时几乎是不可或缺的。
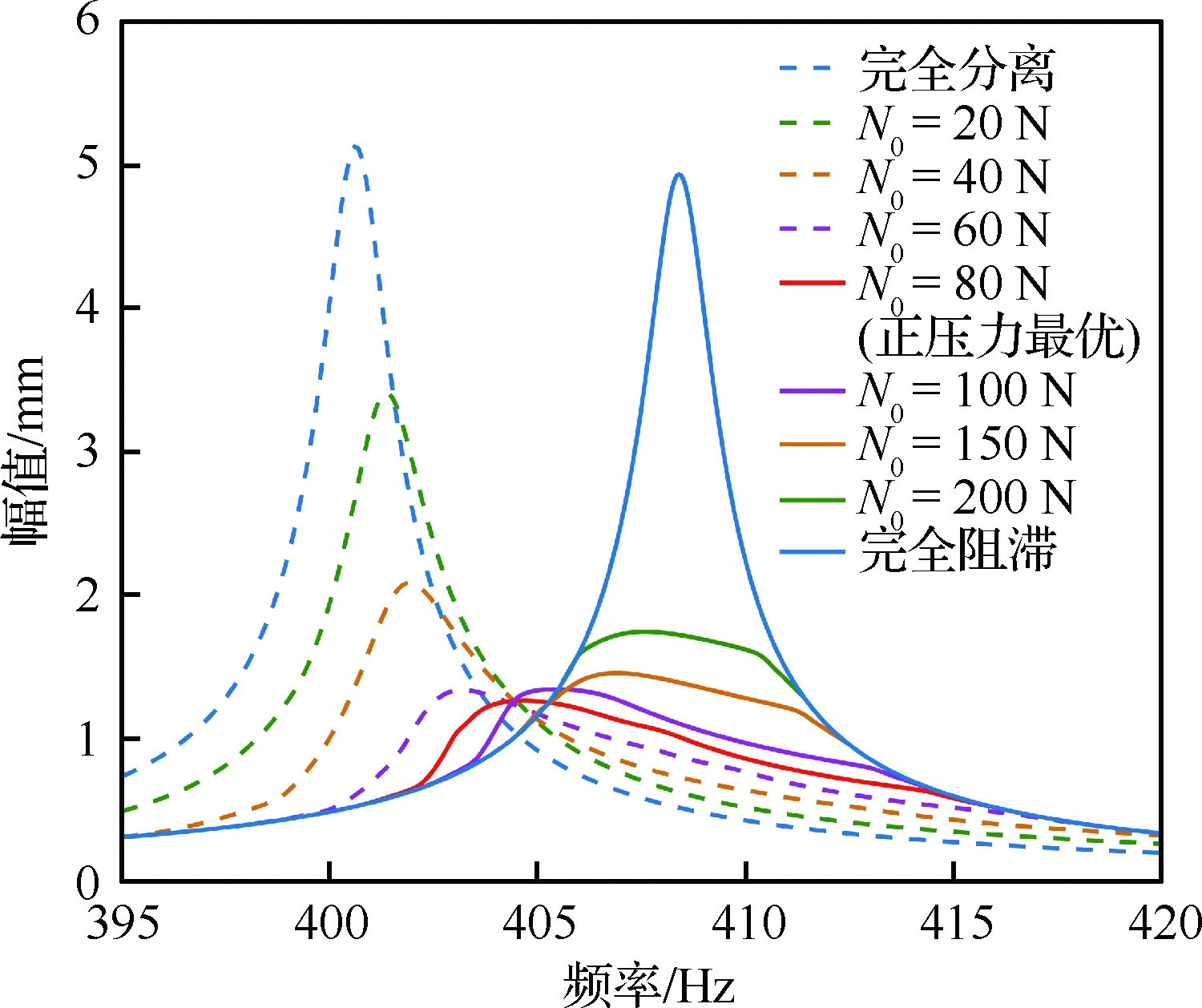
图10 不同正压力下的稳态强迫响应结果
Fig.10 Steady state response of system under different normal preloads
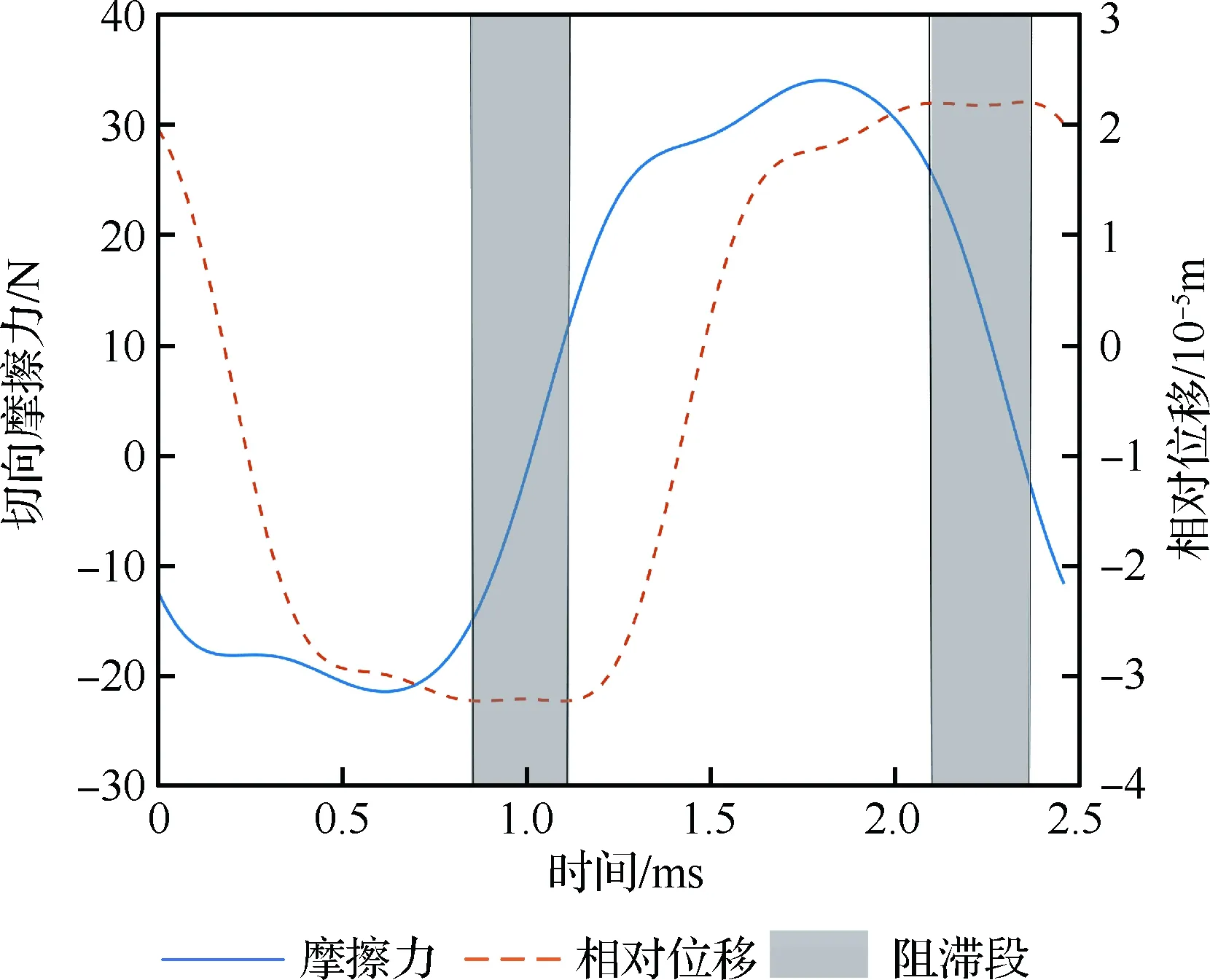
图11 接触点切向力和相对位移的时间历程
Fig.11 Time-histories of tangential force and relative displacement for contact node
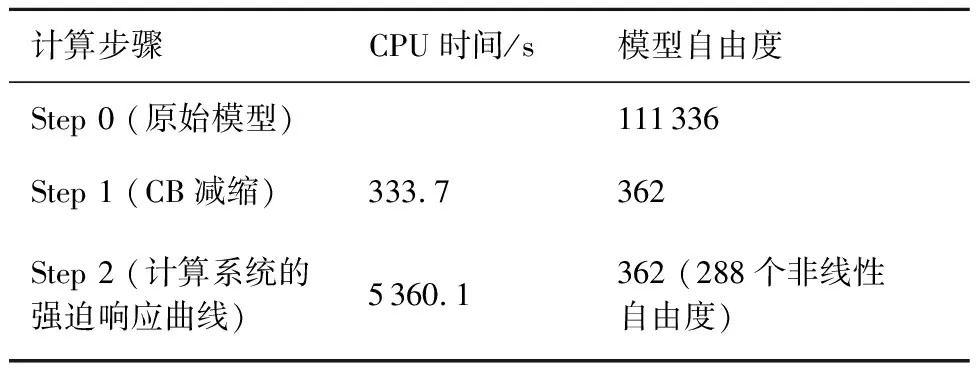
表3 计算时间与减缩过程中自由度数的变化
4 结 论
本文提出了一种适用于薄壁结构的波纹形干摩擦阻尼器,其具有结构简单、附加质量小、易于安装与调节初始正压力的优点。利用仿真模拟的手段对阻尼片的减振性能进行了分析,在高阶谐波平衡法的基础上引入了速度型动态拉格朗日法,并通过提供解析形式的雅克比矩阵来提高迭代效率与计算稳定性,从而实现了对带有接触系统的频域强迫响应的快速预测,之后的仿真过程表明该算法具有较高的计算效率。
利用强迫响应预测算法对带有阻尼片的薄壁结构进行分析,可以看出,对于平板而言,通过合理布置阻尼片的位置,增大结构自由/阻滞时的频率差,从而获得较好的减振效果。以文中的平板结构为例,仅使用质量占整体结构0.6%的阻尼片就能使得共振峰值下降75.4%。
现有工作的一个展望是,针对干摩擦阻尼器在各频段下最优正压力不同的特点,还可以引入主动控制环节通过设计可控正压力提高干摩擦阻尼器在宽频内的减振性能[30,39]。这些后续工作仍然需要一种可以考虑干摩擦界面切-法向耦合的高效数值工具,本文提出的基于减缩模型和解析雅克比矩阵的速度型动态拉格朗日乘子方法仍适用。
附录A
布尔矩阵是元素只取0或1的矩阵,因此又被称为0-1矩阵。它的作用是提取含有m个元素的向量X中的某些特定项,并将提取的元素重新组成维度为n的向量Y。该过程所对应的布尔矩阵B的维度为n×m。

记R为X和Y上的对应关系,则布尔矩阵中B的各元素满足:
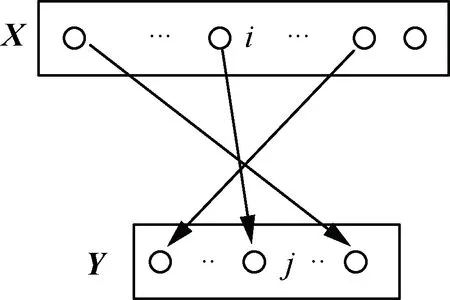
图A1X与Y之间的对应关系
Fig.A1 Correspondences betweenXandY
(A1)
其转置矩阵BT则能将Y中的元素放回X中的对应位置。