基于虚拟场景的车道保持辅助系统仿真测试*
2019-12-27孟醒甘海云严英
孟醒,甘海云,严英
基于虚拟场景的车道保持辅助系统仿真测试*
孟醒,甘海云*,严英
(天津职业技术师范大学,天津 300222)
辅助驾驶技术已经越来越受到人们的关注。文章为了对辅助驾驶技术的功能进行验证,以车道保持辅助系统为例,利用IPG CarMaker仿真软件,构建车辆模型,添加传感器检测车道线及车辆周围的环境,搭建了虚拟的道路测试场景,通过IPGMoive观察仿真动画,IPGControl观察仿真结果并对结果进行了分析,完成了一次完整的仿真测试,最终验证了车道保持系统的功能,证明了仿真试验相对于实车测试极大地降低了发生危险的可能性,并且可以提升测试的效率,缩短系统开发周期,降低测试成本。
辅助驾驶;虚拟场景;车道保持;仿真测试
前言
随着汽车工业的发展,辅助驾驶及自动驾驶技术已成为发展趋势,辅助驾驶技术不仅能减少由于驾驶员人为因素导致的交通事故,也能降低交通拥堵程度。该项技术核心问题是功能可靠性[1-2]。如表1所示,自2016年起至2018年,全球已发生了近10起由于自动驾驶导致的交通事故,所以对辅助驾驶系统进行功能验证是必要的。目前,常用的驾驶辅助系统包括自适应巡航控制系统(ACC)、前碰撞预警系统(FCWS)、自动紧急制动系统(AEB)、车道偏离预警系统(LDWS)、车道保持辅助系统(LKAS)等等。本文选取LKAS车道保持辅助系统进行以功能验证为目的的仿真测试[3]。
表1 2016-2018年全球自动驾驶交通事故

1 车道保持辅助系统及控制策略
1.1 车道保持辅助系统
车道保持辅助系统是一种高级主动安全系统,在辅助驾驶领域已经被广泛地应用。目前,在多数中高档汽车已配备车道保持辅助系统,车道保持辅助系统同时也逐渐在低端车辆上装配。在与车道线有关的辅助驾驶系统里,包括车道偏离预警系统和车道保持辅助系统。
车道偏离预警系统通过安装在车辆上的摄像头采集当前车道内的车道线,经过图像处理后,将图像信息转化成车辆在当前车道的位置信息,提前预测车辆是否将要偏离原来的车道。当系统判定车辆将偏离车道线以外时,车道偏离预警系统及时向驾驶员发出警报信号,提醒驾驶员控制车辆行驶方向,保证行驶安全性[4]。
车道保持辅助系统是车辆偏离预警系统的进一步功能扩展,在车道偏离预警系统的基础上增加了对刹车、转向和动力系统的协调控制。如果驾驶员开启了转向灯,则车道保持辅助系统会判定出驾驶员将要变更车道,此时,车道保持辅助系统暂时关闭。在无转向指示灯的情况下,当汽车即将驶离当前车道时,且驾驶员还未对即将偏离车道的车辆进行回归控制,则系统会在快要驶离车道之前通过适当的转向干预校正车辆的位置,主动控制器将自行控制执行机构,使车辆回归原车道[5]。此外,驾驶员也可以随时操控系统,如在紧急情况下可以有意驶离行车道,避免发生交通事故。
1.2 控制策略
车道保持辅助系统的特性可以通过与横向偏移相关的辅助力矩来描述。图1是车道保持辅助系统的控制策略图,车道保持辅助系统的辅助力矩的计算是以系统识别车道的信息和一些车辆自身行驶动态参数(如车速)为基础的[6]。控制器通过定位的输入参数和偏移量计算所需的转向阻力矩,用来校正实际行驶轨迹与理想行驶轨迹的偏差。为了使驾驶员能够随时接管对车辆的控制,也应当测量驾驶员的转向阻力矩,如果驾驶员的转向阻力矩超出限值,则应降低对车道保持辅助力矩的影响,车辆的特性要同带传统转向助力装置的车辆相同[7]。
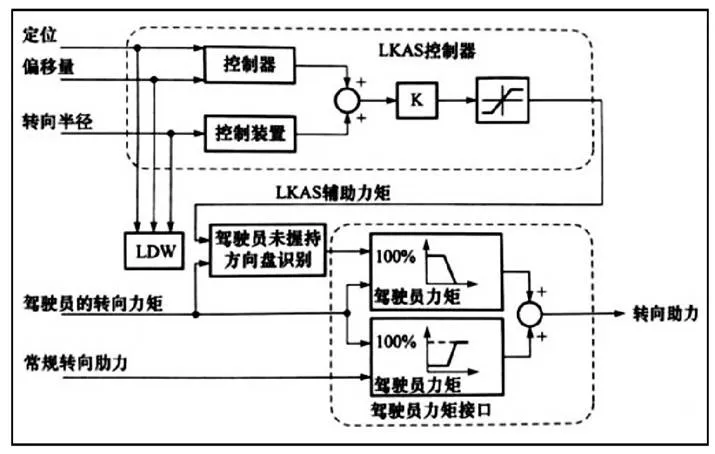
图1 车道保持辅助系统控制策略图
2 实验过程
2.1 仿真工具
CarMaker是一种乘用车车辆动力学仿真软件,主要用于车辆部件开发、控制器开发和整车开发。在汽车V流程开发过程中,必要经过对模型、软件、控制器、车辆的仿真测试,CarMaker在V流程开发过程中具有广泛的应用范围。CarMaker主要由两部分组成,一部分是CarMaker界面工具栏CIT。主要包括图形用户界面GUI(Graphical User Interface),提供了CarMaker所有的功能界面;虚拟仪表,显示踏板和车辆状态等信息;IPGContral,是一种可视化工具,可以观察所选择的输出变量,如速度、加速度等;IPGMoive,在仿真时实时地显示3D动画。另一部分是虚拟车辆环境VVE(Virtual Vehicle Environment),是整个仿真的核心,主要包括CarMaker的可执行文件、控制软件,如CarMaker for Simulink和一些外部模型。
2.2 场景搭建
本文搭建了一种直线道路的测试场景,天气晴朗,风速不大于10m/s,路面干燥平整,峰值制动力系数大于0.9,一系列的道路参数,包括道路长度、宽度、道路边界线宽度,如表2所示。车辆在道路中心行驶,车辆中心偏移道路中心线的距离不超过1.5m。
表2 场景参数

2.3 车辆模型
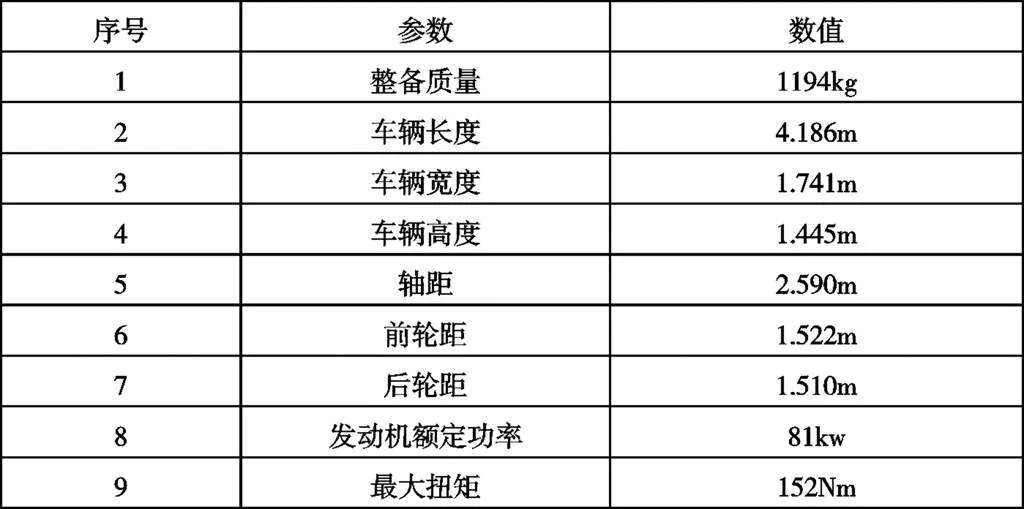
本文构建的车辆模型参数如表3所示,车辆类型为三厢五座乘用车,汽车的整备质量为1194kg,车辆的长、宽、高分别为4.186m、1.741m、1.445m,轴距为2.590m,前轮距1.522m,后轮距1.510m,发动机的额定功率为81kw,最大扭矩为152Nm。
表3 车辆基本参数
2.4 传感器模型
车道保持辅助系统是基于车道标志线识别来确定车道的。系统对于车道识别的预测较高,除了要识别沿某个确定方向上的车道标识线以外,还要求能识别车辆相对车道中央的偏离程度、车辆在车道中的方位以及前方行驶路段的几何形状信息,此外,还必须识别左右两侧车道的边界,否则无法根据车道中央进行调节。本文添加了一种CMOS传感器作为摄像单元,集成了图像处理组件与调节器组件,其中图像处理组件对视觉信息进行准备、分析和解读。
2.5 控制方法
由于车道保持辅助系统的作用,当最小车速为55km/h时,最大助力转向转矩是2Nm,图2是模型车辆的转向辅助力矩的计算方法。车道保持辅助系统的控制算法为PID控制,车轮的偏向角和偏距作为控制器的输入,控制器输出的信号与预设的路径曲率信号合并为目标曲率信号,通过Simulink中的常数模块使信号变为一个常量,再利用饱和度模块对输出常量进行限值,最后的输出结果即为转向辅助力矩。
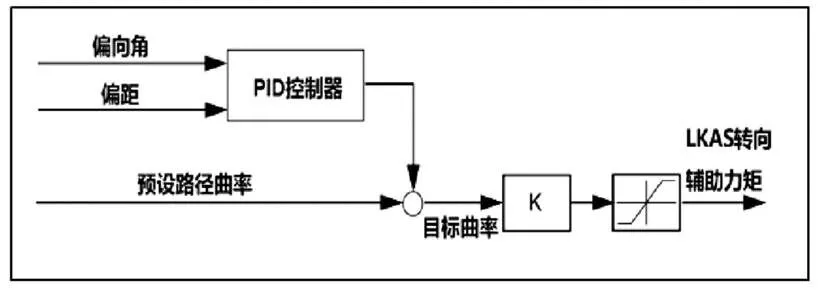
图2 LKAS转向辅助力矩计算方法
2.6 仿真结果分析
图3为试验车辆sRoad的图像。sRoad即交通对象沿道路中心的纵向位置。从图中可以看出试验车辆行驶的时间为19s,随着时间的增加,车辆的纵向位移为335m。
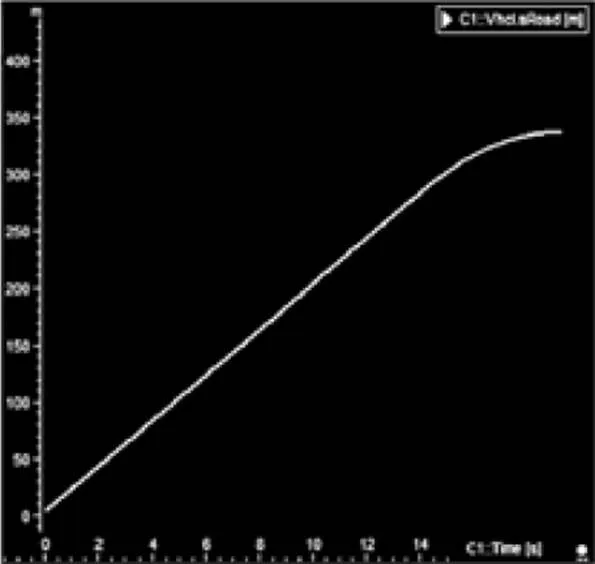
图3 试验车辆sRoad
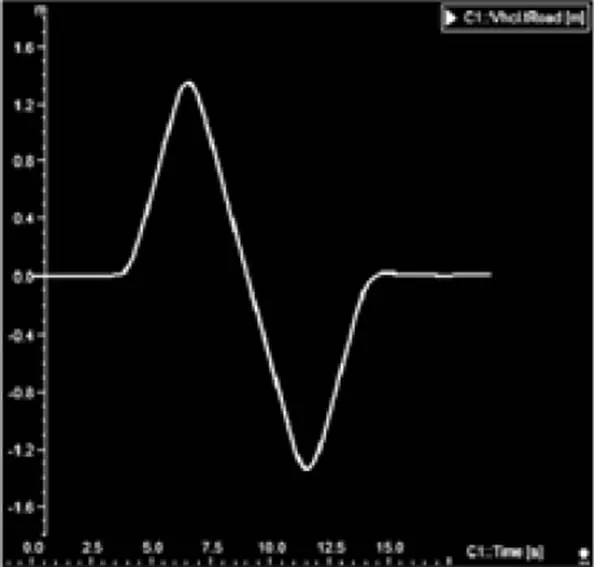
图4 试验车辆tRoad
图4为试验车辆tRoad的图像。tRoad即交通对象基于道路中心线的横向位置。从图中可以看出车辆初始位置在道路中心,第4s时车辆开始向左偏移,第6s时,车辆最大偏移量为1.4m,此后向右偏移,到达第11s时,偏移道路中心右侧最远距离为1.4m,之后回到道路中心位置。
图5是试验车辆的转向转矩。第4s时,车辆开始向左偏移,转向转矩立即从0变为最大值,平均为0.7Nm,之后逐渐减小,到第6s时,车辆向左的偏移量最大,开始向右偏移,转向转矩开始为负,并逐渐增大,第11s时,平均最大为0.7Nm,随后减小到0,12s至16s期间出现了小波动。16s后,车辆回到道路中心,不发生偏移,转向转矩稳定为0。
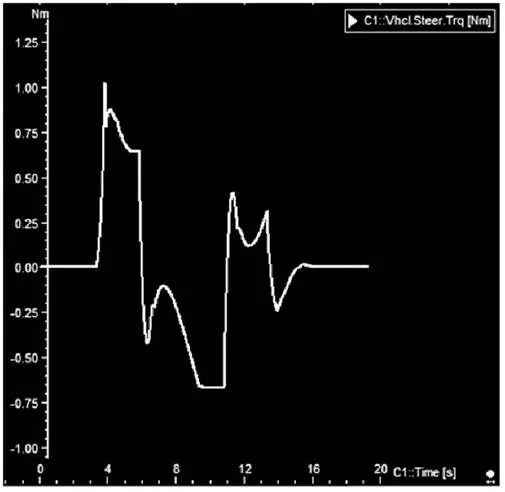
图5 试验车辆转向转矩
图6至图8分别是车辆向左偏移、向右偏移和回到道路中心的3D仿真图。图中黄色区域为传感器可以感知到的范围,红色和绿色的直线是传感器可以检测到的边界车道线。

图6 试验车辆向左偏移
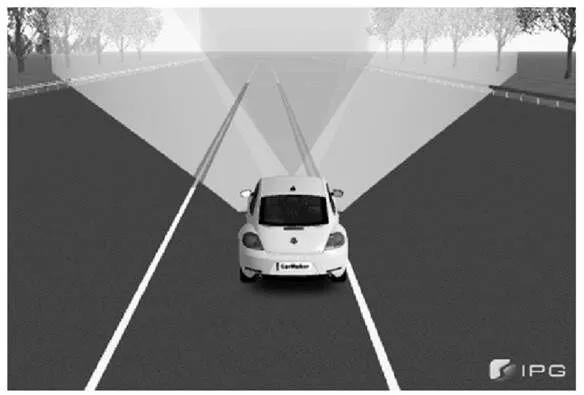
图7 试验车辆向右偏移

图8 试验车辆回到道路中心
3 结论
本文利用CarMaker软件,完成了一次基于的虚拟场景的车道保持辅助系统功能测试,通过分析仿真结果,验证了车道保持辅助系统的功能,当系统发现车辆偏离了检测到的车道线时,可以在有限的范围内使车辆回归到原车道。验证了功能的可靠性。通过这样的仿真试验,可以提升ADAS仿真的效率和精度,节约测试成本,缩减测试周期,为车辆开发也带来了极大的便利。
[1] 贺勇,王春香,董永坤.基于PRESCAN的汽车自动驾驶仿真[J].电脑知识与技术, 2012, 8 (33): 8047-8049.
[2] 黄杨成.基于电动助力转向系统的车道偏离辅助系统的研究[D].安徽:合肥工业大学,2017.
[3] 陆鹏.车道保持系统仿真与试验研究[D].内蒙古自治区:内蒙古大学,2017.
[4] 唐叩祝.车道偏离预警与保持控制系统仿真及试验研究[D].安徽:合肥工业大学,2018.
[5] 金宁.基于EPS系统的人-车-路闭环车道保持辅助系统的研究[D].湖南:湖南大学,2017.
[6] Benine-Neto,A, Scalzi,S and Mammar,S et al. Dynamic Controller for Lane Keeping and Obstacle Avoidance Assistance System [C].Intelligent Transportation System, 2010 13th International IEEE Conference.
[7] 王沛然,常连玉.基于改进驾驶员模型的车道保持控制模型[J].中国安全科学学报,2018,28(7):13-18.
Simulation test of lane keeping assist system based on virtual scene*
Meng Xing, Gan Haiyun*, Yan Ying
( Tianjin Vocational and Technical normal University, Tianjin 300222 )
Assisted driving technology has received increasing attention. In order to verify the function of the assisted driving technology, taking the lane keeping assist system as an example, the IPG CarMaker simulation software is used to construct the vehicle model, add sensors to detect the lane line and the environment around the vehicle, and construct a virtual road test scene. Observing the simulation animation through IPGMoive, IPGControl observes the simulation results and analyzes the results to complete a simulation test. Finally, it verified the function of the lane keeping system. It proves that the simulation test greatly reduces the possibility of danger compared to the actual vehicle test, and can improve the efficiency of the test, shorten the system development cycle, and reduce the test cost.
Assisted driving; Virtual scene; Lane keeping; Simulation test
V323.19
B
1671-7988(2019)24-34-04
V323.19
B
1671-7988(2019)24-34-04
10.16638/j.cnki.1671-7988.2019.24.011
孟醒,在读硕士研究生,就读于天津职业技术师范大学智能车路协同和安全技术国家地方联合工程中心。
甘海云,博士,教授,就职于天津职业技术师范大学,研究方向:智能汽车控制系统开发和测试。
基于封闭园区及开放道路的L4级智能网联汽车研发及示范运行,项目编号18ZXZNGX00230。
