超大型集装箱船全浪向波浪增阻预报技术研究
2019-12-26封培元沈兴荣范佘明王金宝
封培元 沈兴荣 范佘明 王金宝
(1. 上海市船舶工程重点实验室 上海200011;2. 喷水推进技术重点实验室 上海201100;3.中国船舶及海洋工程设计研究院 上海200011)
引 言
船舶在波浪中航行时所受的总阻力较静水中不同,在迎浪和艏斜浪中的总阻力均值往往较静水中有所增大,一般称之为波浪增阻;在艉斜浪和随浪中同样可能存在阻力增加的现象,但量值上较迎浪和艏斜浪小一些。近年来,在国际海事规范不断推陈出新的大背景下,波浪增阻领域研究焕发出了全新的活力,引起了广泛关注,成为了当前船舶耐波性领域研究的热点和难点。与波浪增阻相关的法规规范和技术标准包括:国际海事组织(IMO)推出的“新造船能效设计指数(EEDI)规范”[1]和为保障船舶在恶劣海况下能够维持操纵性所发布的“最小推进功率确定临时导则”[2],以及国际标准化组织(ISO)新版的“实船测试航速和功率数据修正导则”[3]和国际拖曳水池大会(ITTC)正在更新中的“实船测试航速/功率数据分析推荐规程”[4]等,其中均对波浪增阻的正确预报提出了一定的要求。特别在进行实船测试的航速和功率修正时,需要用到全浪向中的波浪增阻信息,因为实船试航时难以保证船舶始终以迎浪状态航行,而艏斜浪中的波浪增阻有时较迎浪中更为显著(参见德国汉堡水池公开发表的试验结果[5]);另外,船舶在艉斜浪和随浪中航行时也可能遭受波浪增阻的影响,而目前的实船测试航速修正中均未考虑此类情况,这对于船舶交付是不利的。因此,有必要对全浪向下的波浪增阻预报及试验验证方法开展研究。
已有的波浪增阻理论计算方法早就能够对全浪下的波浪增阻进行预报。日本的Maruo[6]早在1980 年就提出了一种基于远场公式的简化计算方法,然而国内当前主流的与波浪增阻相关的研究,无论是船型优化[7-9]还是先进数值计算研究[10-15],几乎都只关注迎浪中的波浪增阻。其中很重要的一个原因就是缺乏可靠的迎浪以外浪向的波浪增阻试验数据用于对计算结果进行验证。传统的波浪增阻试验往往采用拖航方式,试验时约束模型的横荡和摇艏运动,因此仅适用于迎浪和随浪两种浪向。为能将拖航方法拓展至全浪向范围,德国汉堡水池专门开发了六自由度的适航仪[5],但该试验设备结构复杂、造价高昂,且横向和纵向运动由弹簧约束,仍可能对模型运动产生限制作用,从而影响试验结果。国际拖曳水池会议(ITTC)的耐波性委员会和船舶营运性能委员会均密切关注着该问题的研究进展。船舶在斜浪中的增阻试验技术难度很高,目前国际上还未达成统一的试验方法和规范流程;并且由于受制于试验技术的局限性,也难以对现有理论方法得到的结果进行验证,因而理论模型也较长时间无法有大的发展。
本研究中基于势流理论和经验修正方法建立了超大型集装箱船在任意浪向规则波中的波浪增阻预报方法并编制了相应的计算程序;基于自由自航模方法开展了超大型集装箱船在全浪向中的波浪增阻模型试验研究;通过两者间的相互验证从而证明所建立的数值预报模型与模型试验方法的正确性。
1 全浪向波浪增阻数值预报方法
本文所建立的全浪向波浪增阻预报数值预报方法基于频域势流三维面元法进行耐波性计算,再基于远场公式对波浪增阻进行预报。联合希腊雅典科技大学,自主开发了数值计算软件“Newdrift”。
根据线性势流理论,将速度势分为三部分进行独立研究,分别为入射势、辐射势和绕射势,并且将波浪增阻分为辐射增阻RAWR与绕射增阻RAWD,由此推导出的波浪增阻远场公式如下:

式中:θ为船体所激发的元波的方向;参数Ω =ωeV/ g;K0= g /V2为定常波数;被积分的柯钦函数的定义如下:


波长相对较短的情况下(即λ/L< 0.5),船体运动幅度不大,波浪增阻的主要成分是绕射增阻,并且粘性和碎波现象较为严重,基于势流理论的方法难以准确预报计算增阻,故一般进行经验修正。基于大量的理论研究并对实验数据进行分析,希腊雅典科技大学的刘树魁和Papanikolaou[16]推出了一个新型的经验公式用于绕射效应增阻RAWD的近似计算,公式具体形式如下:



2 基于自由自航的全浪向波浪增阻试验研究
传统的波浪增阻试验研究以迎浪为主,通常采用约束模方法,利用拖车拖曳船模保持恒定航速在波浪中前进,并利用力传感器测量船模所受的波浪力时历,分别在静水中和波浪中开展试验,以所测得的波浪力时历的差值作为波浪增阻值。然而,传统的约束模方法对于全浪向(特别是斜浪)中的增阻试验不再适用,因为斜浪中船模将发生较大幅度的横摇、横荡和摇艏运动,若采用约束模方法,则会对船模运动产生限制。另外,即使在迎浪和随浪中开展试验时,由于必须借助适航仪拖动船模前进,因此对船模的纵荡运动模态也会产生限制。目前一般采用弹簧约束的方式使船模在前进过程中仍能在纵荡自由度上保持一定程度的波频振荡运动,以此更真实地模拟实船在波浪中的运动特性,但波浪增阻的测试结果或多或少会受到影响。
采用自由自航模方式开展试验则能有效解决上述问题,对船模在斜浪、横浪等非迎(随)浪状态下航行时的运动不会产生任何限制,通过测量并对比螺旋桨发出的推力在波浪和静水中的差值来体现波浪增阻的程度。
整个自航模测试系统如下页图1 所示,需在船模上安装全套的推进系统,包括螺旋桨、用于测量螺旋桨推力的动力仪、用于驱动桨并控制桨转速的伺服电机、伺服电机驱动器,以及给电机供电的电池单元;另外,还需在船模上安装一套自动舵系统,包括舵、舵机、航向角陀螺、舵机控制模块和自动舵系统的动力模块。
试验前,首先对船模的重量重心和转动惯量进行调节,使模型与实船间满足傅汝德数相似条件。正式试验时先进行静水中的试验,再开展相同模型状态下的波浪中试验。测试开始时,启动螺旋桨并使其以指定的转速旋转并推动船模按所要求的航速前进;船模在波浪中发生失速时应及时调节桨的转速确保模型速度达到试验工况指定值。在此过程中,自动舵系统用于保持船模的航向。由于船模在航行过程中受波浪作用会偏离既定航向,自动舵系统会根据航向角陀螺采集到的实时航向角信息由控制模块产生一个用于纠正航向的舵角反馈,并由舵机实现操舵,以此实现航向保持。

图1 自航模测试系统
分析试验测得的螺旋桨推力数据,波浪中和静水中的平均值之差即为波浪增阻值。需要说明的是,由此得到的波浪增阻结果中既包含了波浪力的作用,还包含了波浪中螺旋桨推进效率变化和操舵的影响,因此更为全面。当然,一般规则波中试验时为保证线性假定不会采用大的波高,因此螺旋桨推进效率变化不大,为保持航向而产生的操舵也有限;但对于恶劣海况下的模型试验,这些额外影响的重要性就将有所体现,特别是存在螺旋桨飞车情况时。
采用自由自航模方法,针对一型集装箱船在我院拖曳水池中开展了包含艏斜浪、横浪、艉斜浪等多个浪向下的模型试验。
该拖曳水池长280 m、宽10 m、水深5 m,拖车最高速度可达9 m/s。水池同时配备有池端和池侧造波机,可生成各种浪向下的规则波和不规则波。其中,池端造波系统由4 台单板造波机组成,可以生成周期0.5 ~ 5.0 s 的规则波(最大波高0.5 m);池侧造波系统由160 台造波机组成,每块摇板宽0.5 m,可以生成周期0.5 ~ 3.0 s 的规则波(最大波高0.3 m),浪向范围±45°。
如图2 所示,试验对象为一艘超大型集装箱船,木模缩尺比为60,其主要参数如表1 所示。在试验准备阶段通过压载配置使船模的重心位置和横向、纵向惯量达到指定值。

图2 试验目标船模型
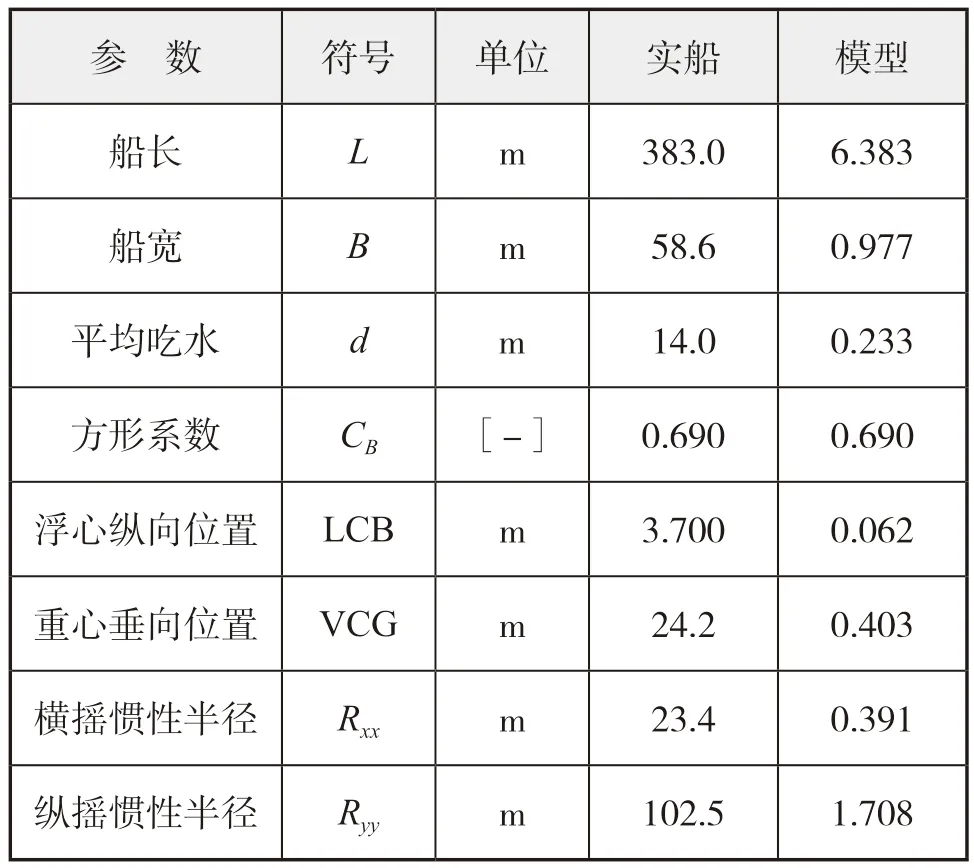
表1 试验目标船主要参数
船模上所安装的自动舵系统如图3 所示,采用比例控制策略实现航向角的快速纠偏;航向角陀螺型号为HT-CJY-3,航向精度偏差在10 min 内小于0.6°。
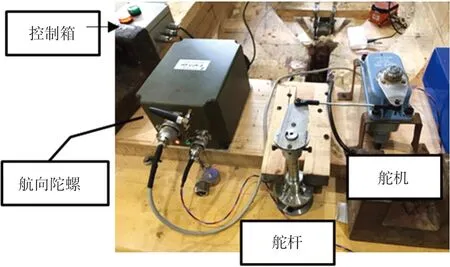
图3 试验船模所用自动舵系统
用于测量螺旋桨推力的动力仪为CUSSONS R31,可测量的最大推力为100 N,扭矩为4 Nm,最大转速限制为50 r/min,推力和扭矩的测量精度可达0.15%FS。推力的采样频率为20 Hz。螺旋桨转速由伺服电机控制,精度可达0.01 r/min,足够满足本次试验对航速调控的精度要求。
在拖曳水池中开展试验的过程如下(如图4 所示):船模位于侧桥之间,待造波稳定后启动船模上的螺旋桨和自动舵,同时启动拖车跟随船模一同前进;拖车上架设2 台摄像机用于观察船模与拖车间的相对位置,根据船模和拖车间的速度关系实时调节螺旋桨的转速,确保船模的前进速度与拖车一致。另外,在水池中布置固定式的浪高仪,用于测量规则波的波高和周期。
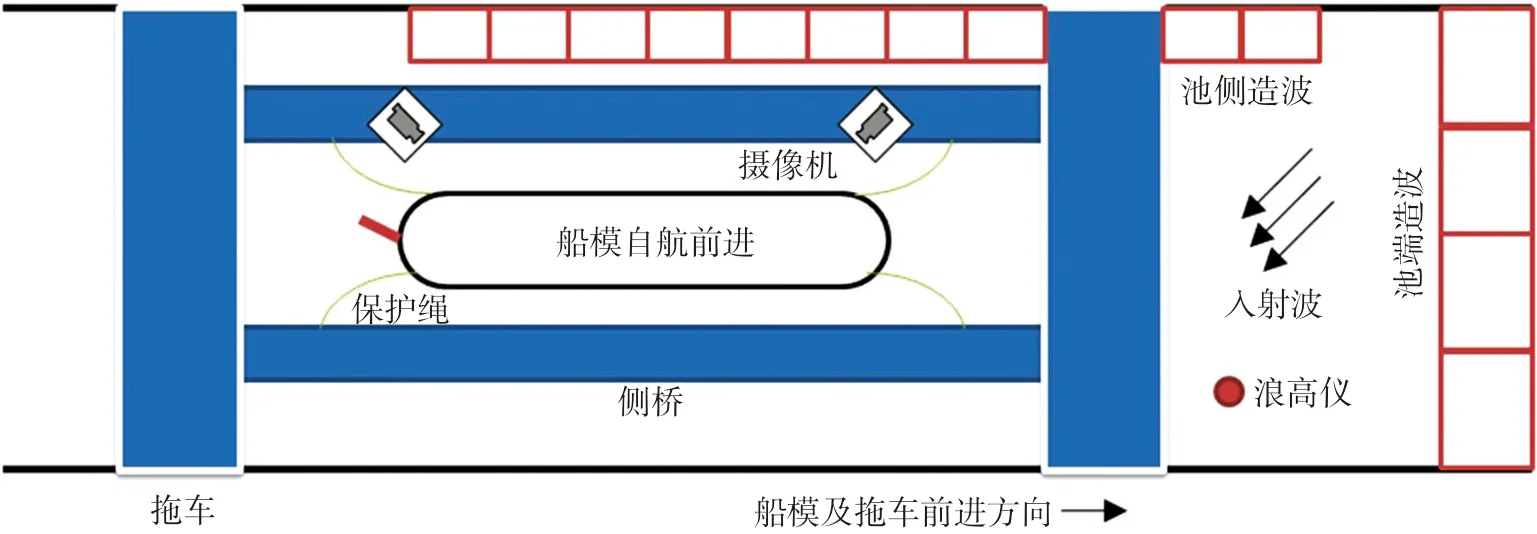
图4 试验布局示意
针对目标集装箱船的满载吃水状态,开展了服务航速22.5 kn(对应模型速度1.49 m/s)下5 个不同浪向规则波中的波浪增阻试验,包括迎浪180°、艏斜浪135°、横浪90°、艉斜浪45°和随浪0°。试验采用等波高方法,所选取的规则波波高为6 cm,覆盖的波长船长比范围在0.25~1.5 之间。图5 为船首视角下的试验照片。
图5 自由自航波浪增阻试验照片(船首视角)
3 试验结果及计算对比
通过试验获得了目标超大型集装箱船在满载状态,迎浪、艏斜浪和艉斜浪这三个不同浪向下的3 组波浪增阻响应曲线,如图6 -图8 所示。图中,横坐标λ/L为波长与船长之比;纵坐标为无因次化后的波浪增阻。

图6 迎浪180°波浪增阻响应试验结果

图7 艏斜浪135°波浪增阻响应试验结果
将本次试验的结果(Exp.MARIC)与荷兰Marin 水池针对完全相同工况开展自由自航模型试航得到的结果(Exp.MARIN)进行了对比;同时基于模型试验结果对本文所采用的数值计算方法得到的预报结果(Newdrift)及法国船级社商业软件(Hydrostar)计算得到的结果进行了对比。结果可以发现:

图8 艉斜浪45°波浪增阻响应试验结果
(1)本次试验得到的结果与荷兰MARIN 水池的试验结果吻合良好,证明了本次试验方法的正确性和结果的可靠性;
(2)本文所采用的数值计算方法能够较好地预报出不同浪向下的波浪增阻,数值计算结果与模型试验结果吻合良好,且精度优于商业软件;
(3)目标超大型集装箱船在斜浪中同样存在波浪增阻,艏斜浪时波浪增阻量值与迎浪时相近;艉斜浪虽然数值变小,但对于实船测试航速修正能发挥一定的作用。
4 结 语
本文阐述了全浪向中波浪增阻的数值预报方法和模型试验技术。基于频域势流三维面元法和远场公式,结合短波中的经验公式修正实现了全浪向规则波中的波浪增阻数值预报。利用基于自由自航模的全浪向波浪增阻模型试验方法,在拖曳水池中针对超大型集装箱船开展模型试验,结果表明该船在艏斜浪中的波浪增阻甚至比迎浪中更为显著,值得更深入的理论分析和数值计算研究;另一方面,船舶在艉斜浪和随浪中同样可能受到波浪增阻的影响,需在进行实船测试的航速修正时有所警觉。
最后,通过模型试验与数值计算结果间的对比,证明了模型试验结果的正确性和所建立的数值预报方法的有效性,能够作为全浪向中波浪增阻的数值和试验预报手段,具有良好的应用前景。