互质线阵中一种基于共轭增广的DOA 估计算法
2019-12-24林新平张小飞沈金清
林新平 张小飞 沈金清
(南京航空航天大学电子信息工程学院,南京,211106)
引 言
近年来,信号波达方向(Direction of arrival,DOA)估计被广泛应用于雷达、无线通信、声呐和生物医学等领域,是阵列信号处理中的一个研究热点[1-3]。经典的超分辨率DOA估计算法,例如多重信号分类(Multiple signal classification,MUSIC)算法[4]、借助旋转不变性进行信号参数估计(Estimation of signal parameters via rotational invariance technique,ESPRIT)算法[5]等,都是基于特征结构的子空间类方法。子空间类方法最初是针对传统满阵提出的,要求阵元间距严格小于等于电磁波半波长,以避免出现角度估计模糊。然而,传统满阵由于阵元间距过小,存在阵元间互耦严重、阵列孔径不足以及测向精度不高等缺点,已经无法满足许多航空航天以及军事民用领域的应用需求。
文献[6]提出了互质阵列的概念。它是一种阵元间距大于半波长的非均匀阵列,由两个阵元数与阵元间距存在互质关系的均匀子阵穿插拓扑构成。相比于传统满阵,互质阵列具有阵元互耦更低,阵列孔径更大,定位测向精度更高等优点。文献[6]中证明了一个具有M+N-1个阵元的互质线阵,能够获得O{MN}的空间自由度。因此,基于互质阵列的空间谱估计研究成为当下信号处理领域的热点问题之一。
文献[7]中提出了一种互质线阵下基于矢量化协方差矩阵的DOA估计方法,称之为虚拟化方法。该方法通过矢量化接收信号协方差矩阵进行数据重构,从而得到一个通过虚拟阵列接收到的单快拍信号。特别地,虚拟阵列能够提供比物理阵列更大的阵列孔径和更高的空间自由度。文献[8]中则提出了基于互质特性的联合MUSIC方法,该方法利用互质线阵的两个子阵单独估计DOA,通过比对子阵间的估计结果消除测向模糊,称之为解模糊方法。相比于虚拟化方法,解模糊方法实现简单,且DOA估计性能更优[9]。然而文献[8]中的MUSIC算法需要全局谱搜索,算法复杂度较高。文献[10]和文献[11]中分别提出了MUSIC部分空间谱搜索的方法和求根MUSIC算法,复杂度相对于文献[8]中的方法具有较大改善。相对于MUSIC算法,互质线阵下的ESPRIT算法[12]显然在算法复杂度上要低得多。文献[13-15]中通过对接收数据矩阵重构和实值化的方法达到降低互质阵列中ESPRTI算法角度估计复杂度的目的。然而,上述DOA估计方法只利用了接收信号的空域信息,并未对时域信息加以利用[16]。
为了能够充分利用互质线阵接收信号的时域与空域信息,本文提出了一种基于共轭增广(Conjugate augmented)的DOA估计算法。算法首先通过利用不同时长间隔下阵元接收信号间互相关函数的共轭对称特性,构造一个共轭增广虚拟阵列接收信号,虚拟接收信号具有和实际信号相同的信号形式,但相比于原有的互质阵列,虚拟阵列中增加了近一倍的镜像虚拟阵元,阵列孔径更大,空间自由度更高。然后采用基于互质特性的联合酉ESPRIT(Unitary ESPRIT)算法[17]对虚拟信号实现DOA估计,称该算法为基于共轭增广的酉ESPRIT(CA-UESPRIT)算法。相比于传统互质线阵下的联合UESPRIT算法,CA-UESPRIT算法自由度更高,DOA估计性能更优。CA-UESPRIT算法通过引入酉变换矩阵降低了ESPRIT算法中的复乘运算次数,算法复杂度较低。
1 阵列结构与数据模型
考虑如图1所示互质线阵,它由两个均匀子阵重合第1个阵元拓扑而成,子阵结构如图2所示,其中子阵1和子阵2阵元数分别为M和N,阵元间距为d1=Nλ/2和d2=Mλ/2,λ为电磁波波长且M和N互为质数。互质线阵总阵元数为M+N-1。
假设互质线阵置于x轴坐标系上,以图1虚线位置为坐标原点,那么互质线阵阵元位置与坐标原点距离可表示为


图1 互质线阵Fig.1 Coprime linear array
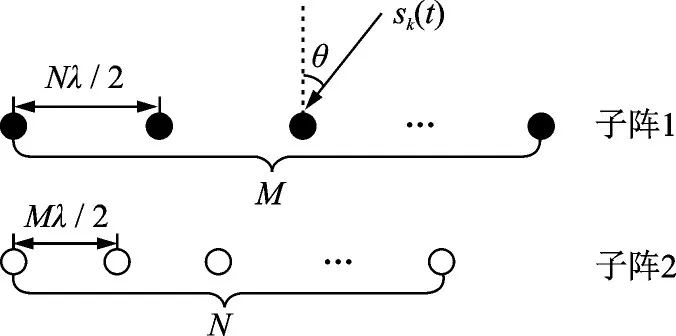
图2 子阵拓扑图Fig.2 Topology of subarray
假设K个远场窄带独立平面波信号以角度θ=[θ1,θ2,…,θK]入射到上述互质阵列中,信号快拍数为J。在t时刻,假设第k个入射信号表示为sk(t)=Akejωkt,其中Ak为信号幅度,ωk表示信号频率,k=1,2,…,K。那么互质线阵中第p(p=1,2,…,M+N-1)个阵元接收信号可以表示为[18]

式中:np(t)表示加性噪声,lp表示集合L的第p个元素,根据式(1)可知l1=0。
阵列接收信号用矩阵形式可以表示为[19]

式中:s(t)=[s1(t),s2(t),…,sK(t)]T为信源矢量,n(t)为均值为0的加性高斯白噪声,协方差均为,且噪声与信号间互不相关。为互质阵列的方向矩阵,第k列表示为

2 基于共轭增广的DOA估计算法
CA-UESPRIT算法实现DOA估计主要包含两个步骤,先是利用不同时长间隔下阵元接收信号间互相关函数的共轭对称特性,构造一个共轭增广虚拟阵列接收信号,随后通过基于互质特性的联合UESPRIT算法[17]求解虚拟阵列的DOA估计结果。
2.1 共轭增广过程
本节通过构造共轭增广虚拟阵列以扩展互质线阵的阵列孔径及提高空间自由度。根据式(2),互质线阵中第1个阵元接收信号与第p个阵元接收信号关于时长τ(τ≠0)的互相关函数可以表示为[16]

式中,Rsksk(τ)表示成[16]

(τ)可以表示为[16]

根据式(7),可以将式(5)重写为

构造矢量Rs(τ)=[Rs1s1(τ),Rs2s2(τ),…,Rsksk(τ)]T,R(τ)=[Rx1x1(τ),Rx2x1(τ),…,RxM+N-1x1(τ)]T,可以得到

根据式(6)可知 Rs(τ)=Rs*(-τ),因此可以得到 (R(-τ))*=A*Rs(τ)。令矩阵 A(2)和矢量 R(2)(τ)分别表示矩阵A和矢量R(τ)的第2~M+N-1行,那么R(2)(τ)=A(2)Rs(τ),构造为


图3 虚拟互质线阵Fig.3 Virtual coprime linear array
设图3中虚线位置为坐标原点,可以看出,虚拟阵列关于原点镜像对称,称之为共轭增广虚拟阵列。其中,虚拟阵列阵元总数为2(M+N-1)-1。根据式(10),构造伪快拍数据矩阵

式中:Ts为伪采样间隔,伪快拍数为伪信号矩阵。那么y可以看作是虚拟互质阵列的虚拟接收信号值。
2.2 DOA估计
本节利用基于互质特性的联合UESPRIT算法求解虚拟信号y的DOA估计结果。将图3中虚拟阵列拆分为两个均匀子阵,如图4所示。
图4中子阵1和子阵2阵元数分别为2M-1和2N-1,阵元间距分别为d1=Nλ/2和d2=Mλ/2。设y1和y2分别为子阵1和子阵2的接收信号值,那么y1和y2可以表示成

式中:Ae,1=[ae,1(θ1),ae,1(θ2),…,ae,1(θK)]∈ C(2M-1)×K和 Ae,2=[ae,2(θ1),ae,2(θ2),…,ae,2(θK)]∈C(2N-1)×K分别表示子阵1和子阵2的方向矩阵,Ae,1和Ae,2第k列分别表示为


图4 虚拟阵列子阵拓扑图Fig.4 Subarray topology of virtual array

式中:k=1,2,…,K。可以得到虚拟子阵1和子阵2的接收信号协方差矩阵分别为R1=E{y1yH1}和
虚拟子阵中阵元间距均大于半波长,因此先利用UESPRIT算法分别得到两个子阵的模糊DOA估计结果,再利用互质特性联合子阵DOA估计值消除测向模糊。
2.2.1 UESPRIT算法
两个虚拟子阵具有相似的阵列结构,因此,以子阵1为例详细阐述UESPRIT算法过程,然后推广至子阵2同理得到子阵2的DOA估计结果。
对于子阵1,引入酉矩阵为

式中:ΠM-1为反对角矩阵。酉矩阵满足对协方差矩阵R1进行酉变换

式中:Re(·)表示取实值操作。酉变换后虚拟子阵1协方差矩阵变为实数矩阵,方向矩阵由Ae,1变为
可知方向矩阵Ae,1满足旋转不变关系式

式中:φx=diag(e-j2πd1sin(θ1)/λ,e-j2πd1sin(θ2)/λ,…,I(2M-2)×(2M-2)]。J1Ae,1和J2Ae,1分别表示选取方向矩阵Ae,1的前(2M-2)行和后(2M-2)行。根据文献[20],酉变换后,方向矩阵由 Ae,1变为 Ω1,因此式(18)变为

对式(17)中实数协方差矩阵进行特征分解,取最大K个特征值对应的特征矢量构成信号子空间Es1,可知Es1与实数方向矩阵Ω1间满足关系式Es1=Ω1T,其中T是一个维度为K×K的非奇异矩阵,将Es1=Ω1T代入式(19)可得

对式(20)中T-1φuT=(K1Es1)+K2Es1进行特征分解,可得特征值为φu的对角元素,记第k个特征值为αk,k=1,2,…,K,那么虚拟子阵1的角度估计值可以表示为

同理,对于虚拟子阵2,对协方差矩阵R2进行酉变换后得到R2,u,参考式(18—21),可以得到虚拟子阵2的角度估计结果,k=1,2,…,K。注意到虚拟子阵1和虚拟子阵2阵元间距均大于半波长,因此得到的角度估计值均为模糊值,需要解模糊处理。
2.2.2 角度解模糊
对于第k个入射信源θk,假设虚拟子阵1和子阵2中分别存在估计模糊角度值θ'k和θ″k,并有以下关系式[8]

式中:θk为第 k个入射信源的真实值,k=1,2,…,K。根据 d1=Nλ/2和d2=Mλ/2,将式(14)和(15)分别代入式(22)和(23),可以得到式中:k1,k2为整数,因为|sin(θk)-sin(θ'k)|<2,|sin(θk)-sin(θ″k)|<2,所以k1和k2的取值范围分别为k1=-(N-1),…,0,…,(N-1)和k2=-(M-1),…,0,…,(M-1)。考虑式(24)和(25)中θ'k,θ″k和θ″k可互换,因此虚拟子阵1和子阵2关于θk的模糊值个数分别为N和M(包含真实值)。其中,联立式(24)和(25)可以得到


因为M和N互为质数,当且仅当k1=k2=0时上式成立,也就是说,当且仅当θk=θ'k=θ″k时,式(26)成立。可以得出结论,虚拟子阵1和子阵2中关于θk的所有模糊值中只有一个是相等的,也就是真实估计值。

2.3 所提DOA估计算法步骤
本文提出的CA-UESPRIT算法步骤如下:
(1)得到互质线阵中第p(p=1,2,…,M+N-1)个阵元接收信号xp(t),利用不同时长间隔τ求阵元接收信号间的互相关函数Rxpx1(τ)。
(2)根据式(8—11)得到共轭增广虚拟阵列接收信号y。
(3)利用UESPRIT算法分别对虚拟子阵1和子阵2接收信号y1和y2进行DOA估计,步骤如式(16—21),得到两个子阵的模糊角估计值
3 性能分析
3.1 最大可辨识信源数
根据文献[1,2],一个具有N个传感器的阵列最多能辨识N-1信源。因此,互质阵列解模糊方法下最大可辨识信源数取决于传感器数较小的子阵。令T=Min(M,N),其中Min(M,N)表示取M和N中的最小值。根据文献[17],传统互质线阵下基于互质特性的联合UESPRIT算法,最大可辨识信源数为T-1。然而,根据2.2节描述,本文提出的CA-UESPRIT算法通过共轭增广特性使得虚拟子阵阵元数分别达到2M-1和2N-1,因此CA-UESPRIT算法的最大可辨识信源数为Min(2M-1,2N-1)-1,也就是2T-2。
3.2 复杂度分析
以复乘次数来评估DOA估计算法的复杂度,CA-UESPRIT算法主要运算复杂度包括:构造虚拟阵列接收信号y所需复杂度为O{Jw(2(M+N-1)-1)},其中Jw为伪快拍数;得到虚拟子阵1和子阵2协方差矩阵R1和R2的复杂度分别为O{Jw(2M-1)2}和O{Jw(2N-1)2};得到实数协方差矩阵R1,u和R2,u的复杂度分别为O{2(2M-1)3}和O{2(2N-1)3}。因此,总运算复杂度为O{Jw(2M+2N-3+(2M-1)2+(2N-1)2)+2(2M-1)3+2(2N-1)3}。本文利用UESPRIT算法实现DOA估计,不需要计算协方差矩阵特征分解以及后续总体最小二乘法的复杂度,因此复杂度相比于ESPRIT算法要低。
3.3 优点总结
本文提出的CA-UESPRIT算法具有如下优点:
(1)相比于传统互质线阵下基于互质特性的联合UESPRIT算法,CA-UESPRIT算法空间自由度更高。
(2)CA-UESPRIT算法具有比联合UESPRIT算法更优的DOA估计性能。
(3)CA-UESPRIT算法通过引入酉变换矩阵降低了ESPRIT算法中的复乘运算次数,算法复杂度较低。
4 仿真结果
本文采用1000次蒙特卡洛仿真的求根均方误差(Root mean squares error,RMSE)评估DOA估计算法性能,定义RMSE为

图5为本文DOA估计算法在信噪比SNR=0dB条件下角度估计图。图5中横坐标为仿真次数,纵坐标为估计出的角度值。仿真参数设置为阵元数M=3,N=5,快拍数J=200。其中图5(a)入射信源数 K=3, θ =[25°,30°,35°],图 5(b)入射信源数 K=4, θ=[25°,30°,35°,40°]。从图 5中可以看出,本文提出的CA-UESPRIT算法可以准确估计出信源角度值,且仿真结果验证了3.1节中提出的本文算法可辨识信源数能达到2T-2=4,其中T=Min(M,N)。而根据文献[17],传统互质线阵下基于互质特性的联合UESPRIT算法,可辨识信源数仅能达到T-1=2。此外,对比图5(a)和图5(b),可以看出随着信源数的增加,算法估计角度精确性变差,图5(a)中RMSE值对应于不同仿真次数分别为0.0842,0.0831,0.0838,0.0866,0.0827,如图 5(b)所示,RMSE 值分别为 0.1330,0.1295,0.1372,0.1276,0.1372。可以得出信源数增加使得RMSE性能降低。
图6为互质线阵下不同DOA估计算法随信噪比SNR变化下的RMSE性能对比图,仿真参数均设置为阵元数M=3,N=5和K=2,θ=[20°,40°]。算法包括基于共轭增广的CA-UESPRIT算法、CA-ESPRIT算法和CA-PM算法以及传统互质线阵下基于互质特性的联合UESPRIT算法[17]、ESPRIT算法[9]和PM算法。从图6可以看出,随着信噪比的增加,所提CA-UESPRIT算法的RMSE性能逐步变优,也就是说,信噪比的增加带来角度估计精度的提升。对比不同的DOA估计算法性能,可以看出,所提的CA-UESPRIT算法DOA估计性能与CA-ESPRIT算法十分相近,但CA-UESPRIT算法将协方差矩阵从复数域转化到实数域,所以算法复杂度更低,且CA-UESPRIT算法DOA估计性能要优于CA-PM算法。此外,相比于互质线阵下基于互质特性的联合DOA估计算法[9,17],本文提出基于共轭增广特性DOA估计算法由于构造的虚拟阵列信号具有更大的空间自由度,因此在RMSE性能全面占优。

图5 DOA估计结果散点图Fig.5 Scatter of DOA estimation results
图7 为互质线阵下不同DOA估计算法随快拍数J变化下的RMSE性能对比图,仿真参数均设置为阵元数M=3,N=5和K=2,θ=[20°,40°],算法类型与图6中相同。从图7可以看出,随着快拍数的增加,所提的CA-UESPRIT算法DOA估计性能提升。此外,对比不同的DOA估计算法,可以看出基于共轭增广类的DOA估计算法具有更优的RMSE性能。此外,所提的CA-UESPRIT算法DOA估计性能优于CA-PM算法且接近于CA-ESPRIT算法,但CA-UESPRIT算法复杂度较低(具体分析参考图6分析结果)。
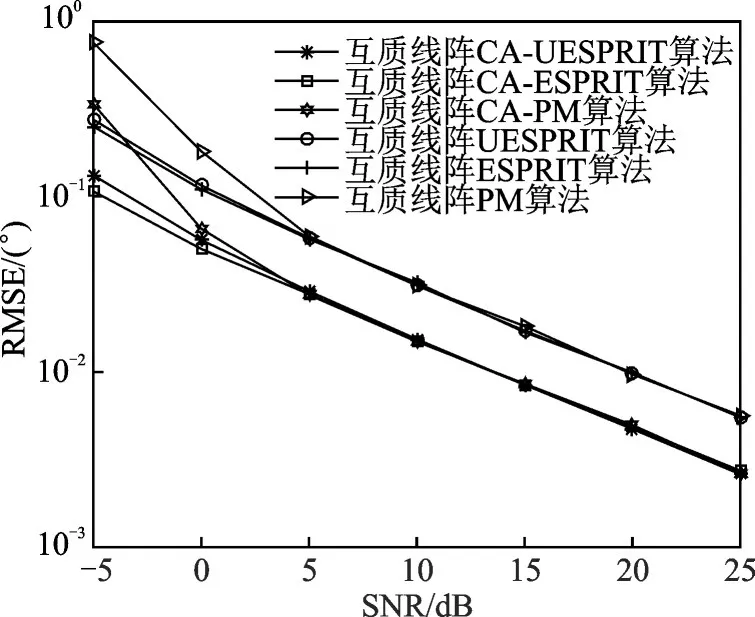
图6 互质阵列下不同算法RMSE性能对比图(J=200)Fig.6 Comparison of RMSE performance with different algorithms for coprime array(J=200)
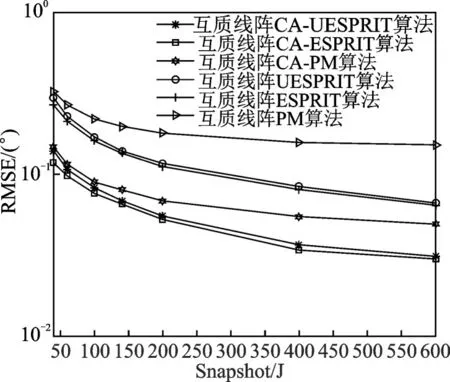
图7 互质阵列下不同算法RMSE性能对比图(SNR=0dB)Fig.7 Comparison of RMSE performance with different algorithms for coprime array(SNR=0dB)
图8 为本文提出的CA-UESPRIT算法下RMSE随信噪比SNR和快拍数J变化的性能对比图,仿真参数均设置为阵元数M=3,N=5和K=2,θ=[20°,40°]。从图8中可以看出,随着信噪比SNR和快拍数J的增大,所提的DOA估计算法角度估计性能变优。
5 结束语
本文提出了互质线阵中基于共轭增广的DOA估计算法。该算法首先利用不同时长间隔下物理阵元接收信号间互相关函数的共轭对称特性,构造虚拟阵列接收信号以扩展阵列孔径和提高空间自由度。然后采用基于互质特性的联合UESPRIT算法实现DOA估计。相比于传统互质线阵下联合的UESPRIT算法,本文提出的基于共轭增广的UESPRIT(CA-UESPRIT)算法角度估计性能更优,空间自由度更高。此外,相比于ESPRIT算法,CA-UESPRIT算法通过引入酉变换矩阵降低复乘运算次数,算法复杂度较低。探索更高效的DOA估计算法将会是下一步的研究方向。
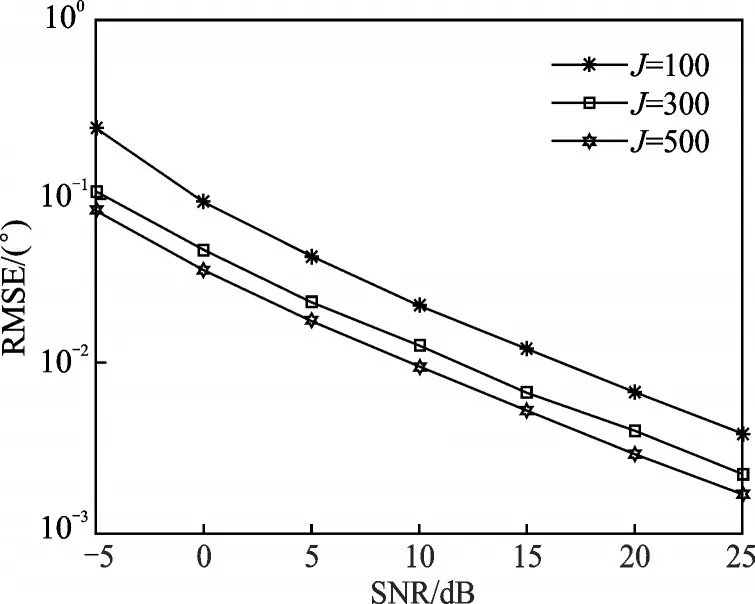
图8 不同快拍数条件下本文DOA估计算法RMSE性能对比图Fig.8 Comparison of RMSE performance of DOA estimation algorithm under different snapshots
