基于超球形模糊支配的高维多目标粒子群优化算法
2019-12-23谭阳唐德权曹守富
谭阳 唐德权 曹守富


摘 要:高维多目标优化问题(MAOP)会随着待优化问题维度的增加形成巨大的目标空间,导致在目标空间中非支配解的比例急剧增加,削弱了进化算法的选择压力,降低了进化算法对MAOP的求解效率。针对这一问题,提出一种以超球型支配关系降低种群中非支配解数量的粒子群优化(PSO)算法。算法以模糊支配策略来维持种群对MAOP的选择压力,并通过全局极值的选择和外部档案的维护来保持种群个体在目标空间中的分布。在标准测试集DTLZ和WFG上的仿真结果表明,所提算法在求解MAOP时具备较优的收敛性和分布性。
关键词:高维多目标优化问题;Pareto支配;粒子群;多样性
中图分类号:TP301.6
文献标志码:A
Manyobjective particle swarm optimization algorithm based on
hyperspherical fuzzy dominance
TAN Yang1,2*, TANG Dequan1,3, CAO Shoufu1,2
1.College of Mathematics and Statistics, Hunan Normal University, Changsha Hunan 410081, China;
2.Department of Network Technology, Hunan Radio and Television University, Changsha Hunan 410004, China;
3.Department of information technology, Hunan Police Academy, Changsha Hunan 410138, China
Abstract:
With the increase ofthe dimension of the problem to be optimized, Manyobjective Optimization Problem (MAOP) will form a huge target space, resulting in a sharp increase of the proportion of nondominant solutions. And the selection pressure of evolutionary algorithms is weakened and the efficiency of evolutionary algorithms for solving MAOP is reduced. To solve this problem, a Particle Swarm Optimization (PSO) algorithm using hyperspherical dominance relationship to reduce the number of nondominant solutions was proposed. The fuzzy dominance strategy was used to maintain the selection pressure of the population to MAOP. And the distribution of individuals in the target space was maintained by the selection of global extremum and the maintenance of external files. The simulation results on standard test sets DTLZ and WFG show that the proposed algorithm has better convergence and distribution when solving MAOP.
Key words:
Manyobjective Optimization Problem (MAOP); Pareto dominance; particle swarm; diversity
0 引言
最优化问题一直是工程实践和科学研究中主要的问题形式之一[1]。其中,函数优化目标在2~3个并且需要同时处理的最优化问题被称为多目标优化问题(Multiobjective Optimization Problems, MOP)。而函数优化目标等于或大于4个的优化问题则被称为高维多目标优化问题(Manyobjective Optimization Problem, MAOP)。多目标问题会随着目标维度的增加导致解空间急剧增大,寻优算法在解空间中几乎全部互为非支配个体;传统的Pareto支配关系无法使算法产生足够的选择壓力,致使算法搜索困难[2]。针对这一问题,国内外的学者们分别提出不同的解决思路。Farina等[3]基于人工决策系统的模糊型最优性定义,提出以非偏好为基础来改进支配关系,从而在优化高维多目标问题时扩大了支配域,但该方法存在容易产生循环支配的缺陷。Li等[4]提出基于移位的密度估计多样性策略,通过调整Pareto支配关系和偏好维护机制的方法来平衡算法的性能,由于该方法需要考虑对目标函数的缩放,因此在优化凹面函数时其分布性能受限。Wang等[5]采用自适应的分解方法,以分治法对高维多目标问题进行降维分解,该方法可以提高算法的性能,但其困难之处在于需要对分解所得的子问题施加人工约束。陈振兴等[6]在张角概念的基础上提出了一种新的拥挤控制策略,能够较好地维护种群的分布的均匀性,但该方法效能严重依赖于角度阈值参数的设定。Deb等[7]通过筛选部分非支配个体的方式来为整个种群选取一组参考点,并以该组参考点来评价个体的质量,从而辅助控制种群在目标空间中的分布,并提出了带精英策略的快速非支配排序遗传算法(Nondominated Sorting Genetic Algorithms Ⅲ, NSGAⅢ)算法。但值得注意的是,文献中并没有讨论该方法在有约束优化问题上的性能。
粒子群优化算法(Particle Swarm Optimization, PSO)是由Kennedy等[8]于1995年提出的一种智能优化算法。PSO算法是一种源于对鸟群等群体运动行为的优化工具,与其他的优化算法相比较,PSO具有算法简单、收敛速度快、对目标函数要求少等特点,因而成为重要的优化工具。近年来,国内外学者在研究PSO优化多目标问题的领域取得了很大的进展,提出了不少基于PSO的多目标优化算法,但将PSO用于高维多目标优化问题求解的理论和方法较少。其原因在高维多目标优化问题上最优解分布于Pareto最优前沿面之上,巨大的解空间将导致PSO的选择压力迅速降低,算法早熟收敛而无法有效获取问题的最优前沿面。
针对PSO的缺陷,本文提出一种基于超球形模糊支配的高维多目标粒子群优化(Hyperspherical Fuzzy dominance Particle Swarm Optimization, HFPSO)算法。在可行解全部目标维度上增加一个半径以形成超球体,以超球体所张成的空间来扩展可行解的支配域。同时,为增加算法的选择压力,以模糊支配策略来进一步降低非支配解在种群中的比例。在分布性维护操作上,将个体全局最优值的选择策略调整为动态概率选择, 更好地平衡了算法的收敛性和多样性。
1 基本理论与概念
1.1 高维多目标优化问题
不失一般性,一个具有n个决策变量、m个目标变量的多目标优化问题通常被描述[9]为:
miny=F(x)=(f1(x), f2(x),…, fm(x))T(1)
s.t.x=(x1,x2,…,xn)∈XRn,
y=(y1,y2,…,ym)∈YRm
其中,X为n维的决策空间,Y为m维的目标空间。只有当优化目标为1时,最优解才是在给定约束条件下使目标函数最大的解,而当多个目标要求同时最优时,最优解就是Pareto最优集。下面给出MAOP常用到几个相关定义[9]:
定义1 可行解。对于某个x∈X,如果x满足gi(x)≤0(i=1,2,…,q)和hj(x)≤0(j=1,2,…,p),则称x为可行解。
定义2 Pareto最优。若一个解x*∈Xf是Pareto最优(非支配解),当且仅当x∈Xf:xx*。
定义3 Pareto最优解集。所有Pareto最优解的集合:
P*{x*x∈Xf:xx*}
定义4 Pareto最优前沿面。所有Pareto最优解对应目标矢量所组成的曲面称为Pareto最优前沿面或均衡面PF:
PF*
{F(x)*=(f1(x*), f2(x*),…, fm(x*))x*∈P*}
1.2 標准PSO算法
在标准粒子群优化(PSO)算法中,初始粒子在搜索空间中以一定的速度飞行,并通过追踪两个极值来更新自己完成寻优。两个极值分别为:粒子自身所找到的最优解,称为个体极值pbest;另一个是整个粒子种群目前找到的最优解,称为全局极值gbest。在两个极值的作用下,粒子会依据式(2)来更新自己的速度和位置[8]:
vk+1=c0vk+c1(pbestk-xk)+c2(gbestk-xk)
xk+1=xk+vk+1(2)
其中:vk是粒子的速度向量; xk是粒子当前的位置; c0、c1、c2表示群体认知系数,标准PSO中c0一般取(0,1)的随机数,c1、c2取(0,2)的随机数。在每一维上粒子的速度都会被限制在一个最大速度vmax(vmax>0)内,即vk>vmax或vk<-vmax时,vk=vmax或vk=-vmax。
1.3 标准PSO对MAOP优化的分析
基于Pareto支配关系,标准PSO的种群能够逐渐收敛到一个不被任何其他解支配的Pareto最优解集上。但基于Pareto支配方法的优化效果与种群中非支配解个体所占比例密切相关,Adra等[10]曾指出非支配个体在种群中所占比例会随着算法迭代次数增加而迅速上升,甚至大部分个体都成为非支配解。这将导致算法各种择优策略无法实施,削弱基于Pareto支配比较与选择的效果,导致优化算法搜索能力的下降。为了更具体地分析标准PSO对MAOP优化的性能,以可扩展目标维度的DTLZ1函数[11]为例,分别设置不同的目标维度数。设置PSO的种群规模为N=200,并限定PSO的最大迭代次数Tmax=20,记录PSO在完成不同目标维度优化问题后非支配解的数量。为了消除其他因素的影响,对每种不同目标维度的MAOP独立优化30次,取平均值,结果如图1所示。
实验结果显示随着目标维度的增加,标准PSO中非支配解所占比例迅速提高,削弱了PSO种群在进化过程中基于Pareto支配的选择压力,导致算法性能下降。
2 基于超球形模糊支配的粒子群算法
2.1 超球形支配关系
随着优化问题目标维度的进一步增加,种群中非支配个体的数量将呈指数上升,将大大削弱PSO基于Pareto比较进行选择与搜索的能力。因此,适当放宽Pareto支配关系,则能对其他非支配个体进行比较与选择。Sato等[12]提出了一种扩展支配域的方法,并应用于NSGAⅡ上[13],提高了NSGAⅡ的性能;但这一方法的主要缺陷在于需要为每一待优化的目标函数设置修正参数。考虑到MAOP中最优前沿面为一超平面,算法种群中的个体为了逼近这一超平面,在优化的过程会形成支配关系,而决定个体支配关系的主要因素在于解空间中个体支配域的范围。个体支配域较小,容易提升种群出现非支配解的几率, 大量的非支配解的出现会导致Pareto支配关系在高维空间中面临失效的境地。因此,要维护算法对MAOP的性能,需要扩展个体的支配域,降低非支配个体的数量,维持算法的选择压力以促进算法的收敛。基于此,若以种群中任意可行解为基础,并在其所有维度上都增加一个值为r的半径,那么可得到一半径为r的超球形。该超球形在解空间中所张成的支配域则由可行解现有的支配域扩展而来,以此扩展了个体支配域的范围。
由图2可以看出,按照Pareto支配关系A、B、C互为非支配个体;但在扩展支配域中个体A、C被B所支配。宽松支配关系的核心是提升较优个体的支配概率,通过扩展支配域来放宽支配关系,则降低了对较优目标个数所占比重的要求。此举使得种群中的个体更易形成支配关系,从而提高支配的概率和种群的选择压力,促进算法的收敛。调整半径值r的大小,可控制超球体所张成的扩展支配域。在优化高维多目标问题时可将r值设定为后期小一些,随着迭代次數的增加r值逐渐减小至0,种群中非支配解更容易产生,以加速收敛。式(3)给出了半径值r的动态计算方法,随着迭代次数的增加而动态减小,实现算法在初始时利于全局搜索,后期则加速收敛。
r=rmax-(t×rmax/Tmax); rmax=(vmax×m)/N(3)
其中:rmax为最大半径值,Tmax为算法的最大迭代次数,t为当前迭代次数,vmax为粒子在目标空间中的最大速度,m为MAOP的维数,N为种群规模。
2.2 模糊支配策略
超球形支配关系会使得个体目标函数产生不可预测性,为避免种群个体发生循环支配,Farina等[3]将模糊理论应用于MAOP的优化,提出以个体间目标优劣的数量来衡量个体的支配关系。受此启发,提出一种模糊支配的策略。令F(xi)为个体xi的目标向量。对种群中任意两个不相同个体xi和xj(i≠j)的目标向量F(xi)和F(xj)比较后,可得到xi优于xj、xi等于xj和xi劣于xj三种不同的目标维度比较值,且分别用Better(xi,xj)、Equal(xi,xj)和Worse(xi,xj)表示;则个体xi和xj的模糊支配度C(xi,xj)由式(4)计算;其模糊支配集CS由式(5)表示:
C(xi,xj)=
Better(xi,xj)+Equal(xi,xj)Better(xi,xj)+Equal(xi,xj)+Worse(xi,xj)(4)
CS={C(xi,xj)xi,xj∈[1∶N]∧i≠j}(5)
本文将xi等于xj目标维度数视作xi优于xj的维度数,目的是通过宽松模糊支配关系进一步降低种群中非支配解的比例,维持算法在高维空间中的选择压力。由于大多数MAOP的最优前沿面是事先未知的,超球形模糊支配关系的评价无需其他额外参数,完全利用MAOP函数自身的信息,进而提升算法的选择压力,推动种群有效地逼近真实Pareto前沿。
2.3 全局极值选取策略
在标准PSO中,全局极值gbest起着引导粒子向Pareto最优前沿面逼近的作用, 因此,也是改善算法分布性能的关键。通过调整全局极值的选取策略,可以引导种群向真实Pareto前沿推进,或者沿Pareto前沿进行多样性分布,从而有效改善算法的分布性能。但由于MAOP的最优解是由若干非劣解所构成的集合,在优化MAOP时不能像单目标优化问题那样明确方向,因此需要重新定义对MAOP的gbest;构建由多个占优个体所组成的gbest候选集,实现gbest选择的多样化。为了简化候选集的维护,这里直接将个体的pbest作为gbest候选集,并赋予候选集中所有个体相同的被选几率。
直接将pbest作为gbest候选集,可能会导致PSO出现停滞和群聚两个方面的问题[14]。因此,首先要确定个体在选择全局极值时不能自我选择,只能在其他的(N-1)个体中选择,以避免PSO出现停滞; 其次,PSO在运行初期可能会出现超级个体,超级个体通过自身的竞争优势而被种群其他个体反复选择,从而产生群聚效应,致使种群的多样性下降算法发生退化。为了避免群聚效应的出现,gbest候选集中个体的被选几率为动态概率。若令种群中任意个体i的被选概率为pi,则初始情况下pi=1/(N-1)。若个体i的pbesti被其他任意个体j(j≠i)所选择,那么对于其他(N-2)个个体而言,个体i的被选概率降低,其他的(N-1)个体的被选择概率提升。式(6)给出了个体i被选择为全局极值后概率的变化:
i-1/(N-1), Selected individual
pj=pj+[1/(N-1)2], 其他 (6)
其中,i=1,2,…,N, j=1,2,…,N且j≠i。初始情况下pi=pj=1/(N-1)。
2.4 外部档案维护策略
本文所提出的基于超球形模糊支配的粒子群算法与其他经典的多目标优化算法相同,要建立用于存储非支配解的外部档案Rep,用于保存种群在进化过程中所发现的非支配个体,并以支配关系对个体进行比较。为了优化最终解在目标空间的分布性能,要求Rep中的个体能够尽量广泛且均匀地分布在目标空间之中。因此,维护Rep中个体间的分布也是优化MAOP的关键技术之一。当算法所得到的非支配解数量超过Rep限定最大容量时,则需要删除超出其最大容量的非支配解。对于任意非支配个体i而言,其与Rep中个体的平均距离di值由式(7)计算:
di=NRep(1/di,1)+(1/di,2)+…+(1/di,NRep)(7)
其中:NRep表示外部档案规模的大小,di,1,di,2,…,di,NRep分别表示非支配个体i与Rep中个体间的距离。因此,外部档案维护策略为:根据的Rep规模NRep,依次删除平均距离di值最小的解。
2.5 算法流程
综上所述,基于超球形模糊支配的高维多目标粒子群算法总体流程如下:
步骤1 初始化。设置种群规模N和Rep规模NRep,设定算法最大迭代次数Tmax,并初始化种群粒子,并以当前位置为个体最优pbest,初始化Rep;令t=0。
步骤2 t←t+1。根据2.3节所介绍的方法,为每个粒子选择gbest,按式(2)来更新粒子的速度和位置;计算更新后粒子的目标函数值。
步骤3 根据2.1节、2.2节所提出的超球形模糊支配策略,将种群中的粒子与Rep中的解比较,若粒子支配Rep中现有的解,或两者互不支配,则将粒子保存到Rep之中,并删除Rep中被支配的解。
步骤4 判断Rep中解的数量是否大于NRep:若成立,则根据2.4节所提出的外部档案维护策略,删除Rep中多余数量的解;否则,执行下一步。
步骤5 判断t≤Tmax是否成立。若成立,则跳转返回步骤2;否则,输出Rep中所保存的非支配解。
3 实验及结果分析
为了验证算法的性能,这里选取5个代表性的多目标进化算法作为对比算法,分别为:基于网格的进化算法(Gridbased Evolutionary Algorithm, GrEA)[15]、NSGAⅢ[7]、提升Pareto前沿的进化算法(Strength Pareto Evolutionary Algorithm, SPEA2+)[16]、拐点驱动的进化算法(Knee PointDriven Evolutionary Algorithm, KnEA)[17]和基于分解的多目标进化算法(Multiobjective Evolutionary Algorithms based on Decomposition, MOEA/D)[5],并选择在高维多目标优化领域通用的DTLZ測试函数集[11]及WFG测试函数集[18]上进行对比实验。为了尽量获取一致的数据,按照原文献中所提供的控制参数,使用Python重写了所有对比算法。其中,HFPSO的外部档案与种群大小一致,且c0取(0,1)的随机数;c1、c2取(0,2)的随机数。6种对比算法对DTLZ及WFG测试函数分别设定4种不同的目标维度m=4、6、10、20用于测试比较,对比算法的最大迭代次数均为10-000并独立运行30次取平均值。实验平台为:Core i5 3.3GHz的CPU和8GB的内存。
3.1 算法性能评价指标
现有的研究中一般采用反转世代距离(Inverted Generational Distance, IGD)[19]来评价算法综合性能的优劣,IGD可以同时评价算法所获解集的收敛性和分布性。由于DTLZ及测试函数集的真实Pareto解集已知,所以通过IGD的评价可以直接说明对比算法近似Pareto前沿的收敛性和多样性。通常,IGD指标值越小则说明算法的性能越好。
IGD(P,P*)=∑ v∈P*d(v,P)P*(8)
其中: P为算法在目标空间中所获得的最终解集,P*为均匀分布的Pareto最优前沿面,d(v,P)为Pareto最优前沿面上的点v∈P*到最终解集的最小欧氏距离,P*为Pareto最优前沿面上点的总数。
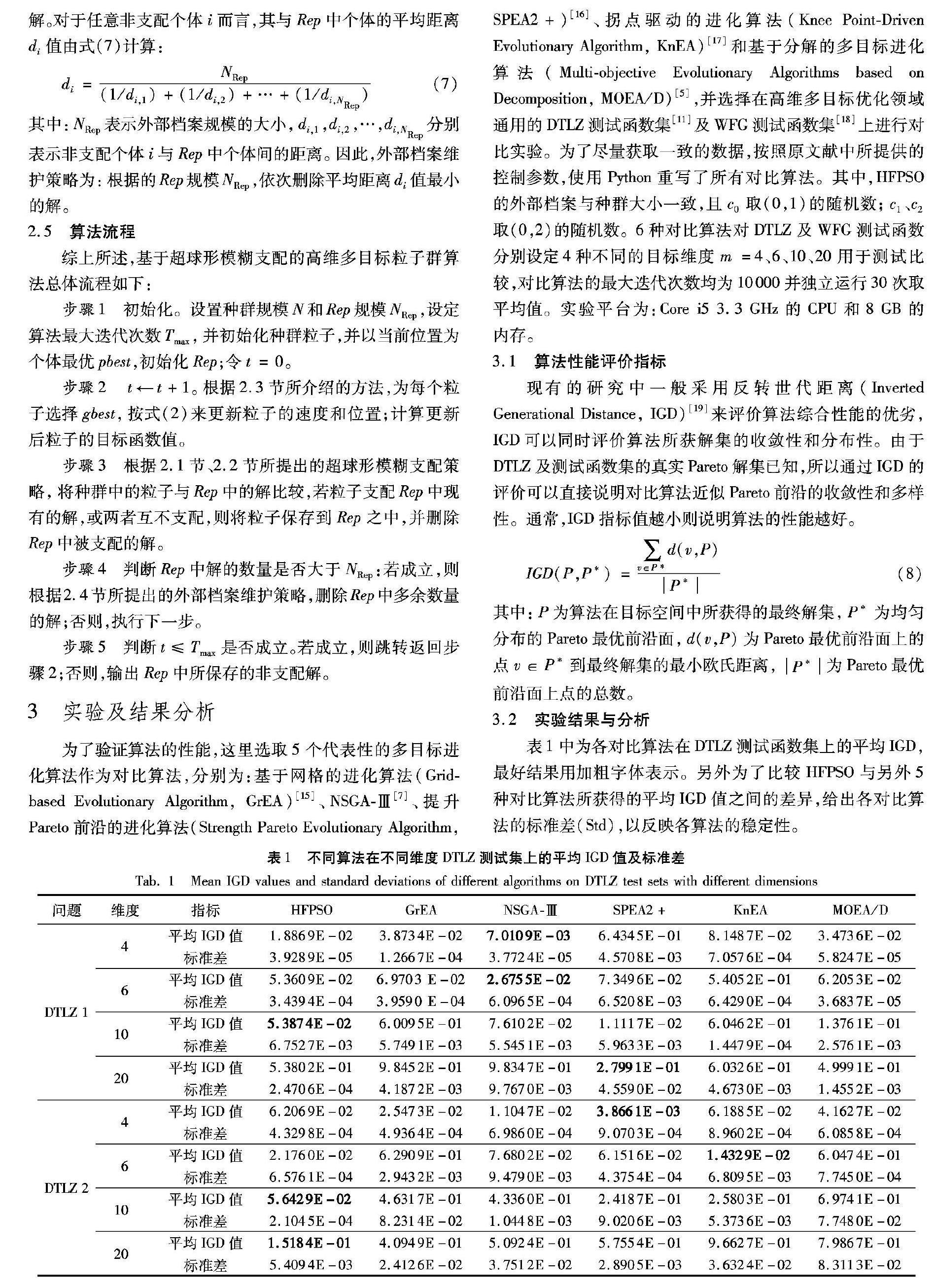
3.2 实验结果与分析
表1中为各对比算法在DTLZ测试函数集上的平均IGD,最好结果用加粗字体表示。另外为了比较HFPSO与另外5种对比算法所获得的平均IGD值之间的差异,给出各对比算法的标准差(Std),以反映各算法的稳定性。
从表1中可以看出,在线性多模态测试函数DTLZ1的优化上,HFPSO在目标维度为10时取得了最优结果,并在目标维度为4、6时取得了次优结果;与在该函数上表现最好的NSGAⅢ相差无几,表现出较强的收敛能力。在凹面函数DTLZ2上,HFPSO分别取得了目标维度为10、20时的最优结果,并取得了目标维度为6时的次优结果;这表明HFPSO在增大目标维度后其运算能力并没有出现快速退化的现象,表现出较好的稳定性。对凹面多模态测试函数DTLZ3而言,HFPSO取得了目标维度为6、20时的最优结果,同时也获得了目标维度为4时的次优结果,这也表明HFPSO较其他对比算法,其全局优化能力有较好的表现。DTLZ4函数是一凹面有偏好的测试函数,主要用于测试算法的分布性及保持分布性的能力,表中HFPSO在目标维度为6时取得了最优结果,并分别取得目标维度为4、10时的次优结果,这也表明HFPSO的全局极值选取策略能够有效维护种群分布的多样性。对于凹面退化的测试函数DTLZ5,HFPSO仅在目标维度为4、6、20时取得次优结果,相较在该函数上表现最好的MOEA/D而言,HFPSO的曲线收敛能力一般,其主要原因在于超球形的支配关系受到了Pareto最优前沿曲面的影响,在部分目标空间中没有形成有效的超球形支配关系。DTLZ6同样为凹面退化的测试函数,但不同于DTLZ5,DTLZ6具有偏好;因此HFPSO在目标维度为4、10时取得了最优结果,并在目标维度为6、20时取得了次优结果,表现出很强的竞争力。在不连续且多模态的测试函数DTLZ7上,HFPSO取得目标维度为6、20时的最优结果,值得注意的是KnEA分别取得目标维度为4、10时的最优结果;SPEA2+则取得该测试函数全部目标维度的次优结果;三种算法均具备较强的在多种Pareto前沿面维护分布性的能力。
表2为各对比算法在WFG测试函数集上的平均IGD,最好结果用加粗字体表示。
从表2中可以看出,在对带有偏好及混合结构的WFG1的优化上,HFPSO在目标维度为6时取得了最优结果,稍逊于表现最好的SPEA2+。在不连续的WFG2问题上,HFPSO表现出不错的性能,在目标维度为4、6时取得了最优结果并取得了目标维度为20时的次优结果。复杂性问题WFG3,其兼具最优前沿退化和决策变量不可以分离的特性,因此优化较为复杂,但在这一问题上HFPSO分别取得了目标维度为6、10时的最优结果和目标维度为4时的次优结果,表现出较强的对高维复杂问题的优化能力。在WFG4~WFG9这6类凸面优化问题的优化上,HFPSO共取得了9次最优结果和8次次优结果,除了在WFG6上与其他对比算法相似外,在高维凸面问题上明显优于其他对比算法。
综观表1、2的结果,HFPSO整体表现最好。其中,在DTLZ测试集上共取得了10次最优结果和11次次优结果;在WFG测试集上,HFPSO共取得了14次最优结果和10次次优结果,表现出较优的总体性能。相较其他5种对比算法,本文算法具有较强的收敛性和多样性上的优势,能有效处理所有的测试函数,且表中的数据也反映出HFPSO具有较好的稳定性。
为了能更进一步地说明HFPSO的收敛性,在表3和表4分别给出了反映6种对比算法收敛性的世代距离指标(Generational Distance, GD)[20],其中GD值越小,说明通过算法得到的非支配解集越逼近真实解集,收敛性越好。
限于篇幅,表3和表4中只给出了具有代表性的线性Parto前沿DTLZ1、凹Parto前沿DTLZ4、凸Parto前沿WFG2、混合前沿DTLZ7和多模态前沿WFG9在目标维度(m)为10和20时的GD指标数据。
综合表3和表4的结果,HFPSO共取得了4次GD指标最优,其中:在DTLZ1的收敛性测试上取得了目标维度为10、20的次优结果,与MOEA/D和SPEA2+一致,表现出较好的收敛性。在凹Parto前沿DTLZ4测试中HFPSO取得了目标维度为10时的最优结果,与表现最优的SPEA2+相差无几。对于凸Parto前沿的WFG2,HFPSO的收敛能力表现一般,主要因为是超球体支配关系在容易在凸Parto前沿测试函数上形成无效的扩展支配域,导致支配概率的相对下降。在混合前沿DTLZ7上HFPSO取得了目标维度为20时的最优解并取得了目标维度为10时的次优解,表现出良好的性能。对于多模态前沿的WFG9函数HFPSO则全面优于其他对比算法,超球形支配关系在多模态前沿问题的优化上表现出很强的竞争力。
为了能够直观地反映所有算法得到的最终解集在高维目标空间中的分布情况,采用平行坐标来可视化高维目标数据,图3中给出了各对比算法在DTLZ4(m=10)上的最终解集。图3中可以看出HFPSO具有良好的解集分布维护性能,其最终解集较其他对比算法具备更好的分布性。这也说明HFPSO所设计的基于超球形模糊支配策略能够有效引导种群收敛,全局极值选取策略和外部档案维护策略能够有效增加解集的分布性,在求解MAOP时能够保持良好的收敛性和解集分布性。
4 结语
高维多目标优化问题的目标空间会随着目标维度的增加呈指数级上升,从而导致难以对其进行有效的优化。针对这一问题,提出以种群个体在维度上增加半径的方式来扩展支配范围,形成以维度半径所张成的超球形扩展支配域,并通过增加模糊支配策略来有效降低种群中非支配个体的数量;维持了算法在高维空间中的选择压力,使得算法的搜索能力不受目标个数增加的影响。
同时,所提出的全局极值选取策略和外部档案维护策略避免了解集多样性的丢失,维护了最终解集的多样性。在对DTLZ测试集和WFG测试集的16个测试函数进行测试后,结果表明HFPSO算法在求解高维多目标问题较对比算法而言,具有收敛性和多样性的优势。
参考文献 (References)
[1]ALI M, SIARRY P, PANT M. An efficient differential evolution based algorithm for solving multiobjective optimization problems[J]. European Journal of Operational Research, 2012, 217(2):404-416.
[2]ZHANG X, TIAN Y, CHENG R, et al. A decision variable clusteringbased evolutionary algorithm for largescale manyobjective optimization[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(1):97-112.
[3]FARINA M, AMATO P. A fuzzy definition of “optimality” for manycriteria optimization problems[J]. IEEE Transactions on Systems, Man, Cybernetics — Part A: Systems and Humans, 2004, 34(3): 315-326.
[4]LI M, YANG S, LIU X. Shiftbased density estimation for Paretobased algorithms in manyobjective optimization[J]. IEEE Transactions on Evolutionary Computation, 2014, 18(3): 348-365.
[5]WANG L, ZHANG Q. Constrained sub problems in decomposition based multiobjective evolutionary algorithm[J]. IEEE Transactions on Evolutionary Computation, 2016, 20(3):475-480.
[6]陳振兴,严宣辉,吴坤安,等. 融合张角拥挤控制策略的高维多目标优化[J]. 自动化学报, 2015, 41(6): 1145-1158. (CHEN Z X, YAN X H, WU K A, et al. Manyobjective optimization integrating open angle based congestion control strategy[J]. Acta Automatica Sinica, 2015, 41(6): 1145-1158.)
[7]DEB K, JAIN H. An evolutionary manyobjective optimization algorithm using referencepointbased nondominated sorting approach, part I: solving problems with box constraints[J]. IEEE Transactions on Evolutionary Computation, 2014, 18(4): 577-601.
[8]KENNEDY J, EBERHART R C. Particle swarm optimization[C]// Proceedings of the 1995 IEEE International Conference on Neural Networks. Piscataway: IEEE, 1995: 1942-1948.
[9]SADOLLAH A, ESKANDAR H, BAHREININEJAD A, et al. Water cycle algorithm for solving multiobjective optimization problems[J]. Soft Computing, 2015, 19(9):2587-2603.
[10]ADRA S F, FLEMING P J. A diversity management operator for evolutionary manyobjective optimization[C]// Proceedings of the 2009 International Conference on Evolutionary Multicriterion Optimization, LNCS 5467. Berlin: Springer, 2009: 81-94.
[11]DEB K, THIELE L, LAUMANNS M, et al. Scalable test problems for evolutionary multiobjective optimization[C]// Proceedings of the 2002 IEEE Congress on Evolutionary Computation. Piscataway: IEEE, 2002: 825-830.
[12]SATO H, AGUIRRE H E, TANAKA K. Controlling dominance area of solutions and its impact on the performance of MOEAs[C]// Proceedings of the 2007 International Conference on Evolutionary MultiCriterion Optimization, LNCS 4403. Berlin: Springer, 2007:5-20.
[13]DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGAⅡ[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197.
[14]BENUWA B B, GHANSAH B, WORNYO D K, et al. A comprehensive review of particle swarm optimization[J]. International Journal of Engineering Research in Africa, 2016, 23:141-161.
[15]YANG S, LI M, LIU X, et al. A gridbased evolutionary algorithm for manyobjective optimization[J]. IEEE Transactions on Evolutionary Computation, 2013, 17(5):721-736.
[16]LI M, YANG S, LIU X. Shiftbased density estimation for paretobased algorithms in manyobjective optimization[J]. IEEE Transactions on Evolutionary Computation, 2014, 18(3):348-365.
[17]ZHANG X, TIAN Y, JIN Y. A knee pointdriven evolutionary algorithm for manyobjective optimization[J]. IEEE Transactions on Evolutionary Computation, 2015, 19(6):761-776.
[18]HUBAND S, BARONE L, WHILE L, et al. A scalable multiobjective test problem toolkit[C]// Proceedings of the 2005 International Conference on Evolutionary MultiCriterion Optimization, LNCS 3410. Berlin: Springer, 2005:280-295.
[19]ZITZLER E, THIELE L, LAUMANNS M, et al. Performance assessment of multiobjective optimizers: an analysis and review[J]. IEEE Transactions on Evolutionary Computation, 2003, 7(2):117-132.
[20]LIN Q, LIU S, ZHU Q, et al. Particle swarm optimization with a balanceable fitness estimation for manyobjective optimization problems[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(1):32-46.
This work is partially supported by the National Natural Science Foundation of China (61471169), the Natural Science Foundation of Hunan Province (2018JJ2104), the Scientific Research Fund of Hunan Department of Education (15C0928).
TAN Yang, born in 1979, M. S., associate professor. His research interests include intelligent computing, information security.
TANG Dequan, born in 1979, Ph. D., associate professor. His research interests include data mining, artificial intelligence.
CAO Soufu, born in 1981, M. S., lecturer. His research interests include information system engineering, multimedia information processing.
