基于模式识别技术的采摘机械手控制系统设计与研究
2019-12-22周炜明
许 娜,周炜明
(河南工业职业技术学院,河南 南阳 473000)
0 引言
机器人是人类20世纪伟大的发明之一,随着人口、食物供应压力的增加及农业劳动力的不断减少,“无人农场”将是一种主流趋势。而采摘机器人在减轻劳动强度、提高工作效率等方面具有较强的优势,在“智慧农业”中将是当之无愧的主角。基于上述现状,本文结合模式识别技术与机械手的运作控制技术,建立了一套具有速度快、准确性高及可行性强等优点的采摘机械手控制系统。
1 模式识别技术
模式识别以计算机平台为主,借助概率和统计分析方法,深入研究模式的智能处理,一般将环境和对象统称为“模式”。随着计算机、人工智能及机器学习等技术的发展,人类研究的信息处理技术更加复杂,而信息处理的整个过程就是对模式的识别。
模式识别在智能控制领域,是指在环境的感知过程中,如利用摄像机获取周边环境的图像信息,然后通过图像处理技术进行分析。智能控制的模式识别理论研究内容涵盖较多,如获取图像、预处理、提取特征信息,以及将特征信息分类训练和决策。模式识别的方法如图1所示。
图像采集是指在LED光源的辅助下,CCD摄像机在触发信号的控制下,获取目标的信息;图像预处理是指对采集到的图像进行增强、消除噪音及平滑等处理;预处理结束后,便是提取图像特征信息,并进行分类选择、训练学习和决策。特征信息主要有颜色、纹理和形状等,一般对颜色和形状的识别居多。在模式识别中,颜色及形状识别流程如图2所示。

图1 模式识别的方法
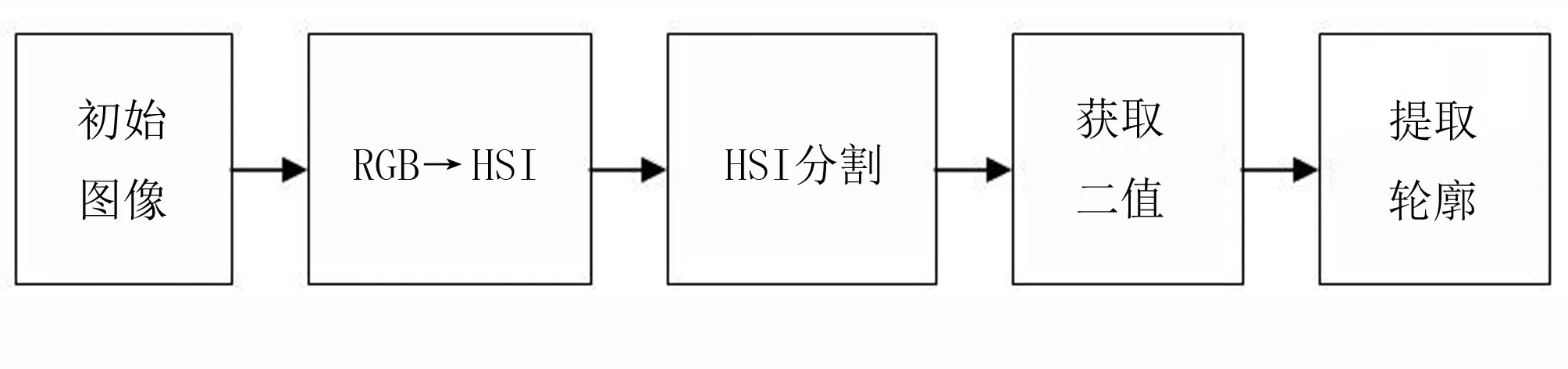
图2 模式识别颜色及形状识别
模式识别系统主要由未知类别模式分类和分类器设计上、下两部分组成,上半部完成模式的分类,下半部属于分类器设计的训练过程,利用样品进行训练,确定分类器的具体参数,完成分类器的设计。典型的模式识别系统结构如图3所示。
2 机械手运动学分析与建模
采摘机器人机械手的设计要根据采摘的对象进行设定,本文选用多关节机械手臂。为了实现机械手的准确实时控制,需要根据机械手的空间结构,搭建机械手的运动学模型,然后对其进行正、逆运动学分析。采摘机械手结构示意如图4所示。

图3 典型模式识别系统结构图
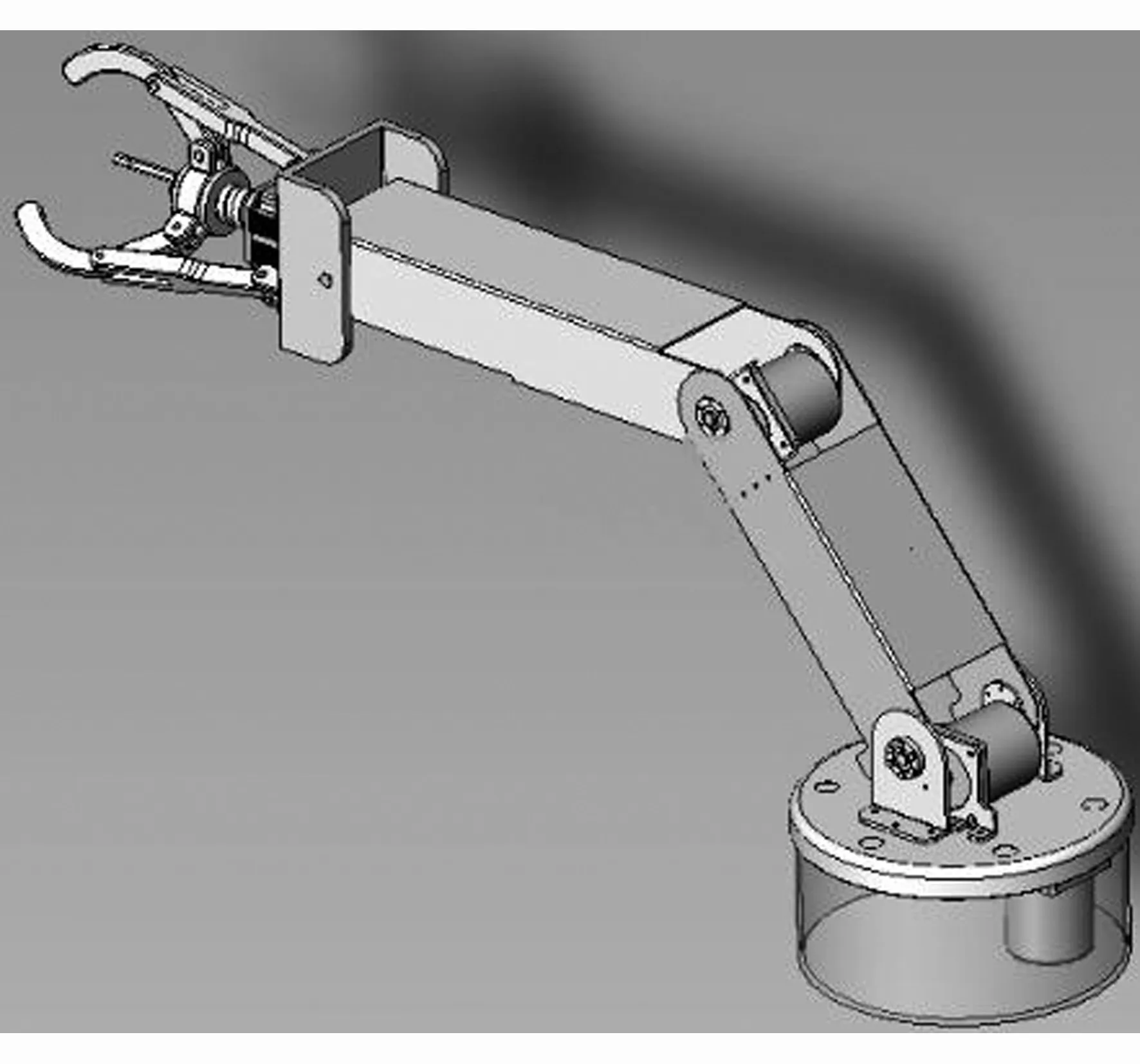
图4 采摘机械手结构示意图
2.1 正运动学分析模型
根据采摘机械手建立其运动学模型如图5所示。

图5 采摘机械手运动学模型
建立采摘臂运动学方程其实就是利用齐次变换矩阵表示相邻两个连杆坐标系之间的相对位姿和运动关系。建立采摘机械手运动学方程主要有以下几个步骤:
1)设定各连杆坐标系,列出相应参数;
2)写出各连杆变化;
3)写出机械手变换矩阵和运动学方程。
各连杆间的变换矩阵为
(1)

(2)
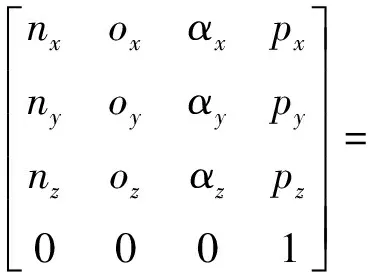
联合式(1)~式(3),可得末端执行器位姿方程为
(3)
(4)
(5)
(6)
其中,(nx,ny,nz)为法线向量;(ox,oy,oz)为并和向量;(ax,ay,az)为接近向量;(px,py,pz)为末端执行器的位置。
方程式(4)~式(6)给出了采摘机械手正运动学方程,完整地描述了采摘机械手相对于基坐标的位置与方位。
2.2 逆运动学分析模型
采摘机械手的运动学反解有很多种,本文研究采用代数方法求解。根据式(2)可以得到采摘机械手的逆矩阵为
(7)
第1步,求θ1,由式(7)得
-s1px+c1ps=d2
(8)
将式(9)与结合式(1)、式(2)联立可得
s1px-c1py=0
(9)
利用三角代换,解出θ1,即
(10)
第2步,求θ2,则
(11)
第3步,求θ3,则
(12)
分别求出θ4和θ5,最后求出θ6,即
θ6=tan2(s5,c6)
(13)
以上式子就是采摘机械手的逆运动学方程。
3 采摘机械手控制系统的软硬件设计
3.1 控制系统整体设计
为了实现对采摘机械手的控制,本文基于图像处理的模式识别技术,获取环境和目标对象的信息。系统通过获取的图像信息,然后由控制系统驱动舵机,去控制机械手臂和末端执行器与目标果实之间的相对位姿,实现机械手的运动控制。其中,处理器采用采用TI公司Sitara系列的AM5728处理器;摄像头采用SONY公司XC-56系列的CCD摄像机;舵机由直流电机、减速齿轮组、电位器和控制电路组成。采摘机械手控制系统架构如图6所示。
3.2 控制系统硬件设计
采摘机械手在作业中,系统首先通过CCD工业相机获取周围环境和目标果实的图像信息,由图像处理器对图像进行处理,然后由运动目标识别与电机驱动实时检测和控制机械手的运动。控制系统由CCD相机、图像处理器、视频逻辑卡、AM5728处理器、运动目标识别与电机驱动系统组成,其框架如图7所示。采摘机械手控制系统主控板布局如图8所示。

图6 采摘机械手控制系统架构图
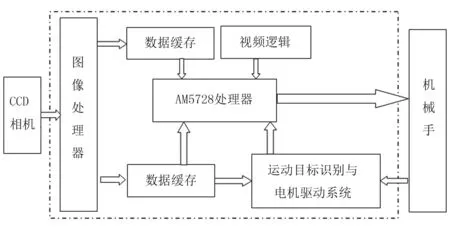
图7 控制系统硬件结构框架图
3.3 控制系统软件设计
为了方便对采摘机械手的控制调试,基于QT开发了采摘机械手动作调试上位机。该上位机是一种图形化编程的软件,通过软件可以对机械臂的单个舵机或全体进行统一的参数更改,如更改舵机的角度或执行时间,然后生成动作组,保存到控制器中。控制器通过动作组调用指令,实现采摘机械手各个动作的执行。采摘机械手上位机框架如图9所示。上位机串口设置窗口如图10所示。上位机调试界面如图11所示。
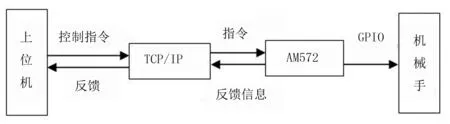
图9 上位机设计框架图

图10 上位机串口设置窗口
4 试验与结果分析
为了验证采摘机械手的定位精度、采摘速度和成功率,对该控制系统进行了主要技术指标测试。试验在某苹果种植园进行,采摘对象为苹果果实。试验中,采摘机械手对一个苹果树上的果实进行实际采摘作业,试验一共测试3组,每次采摘目标是100个苹果。试验结果如表1所示。
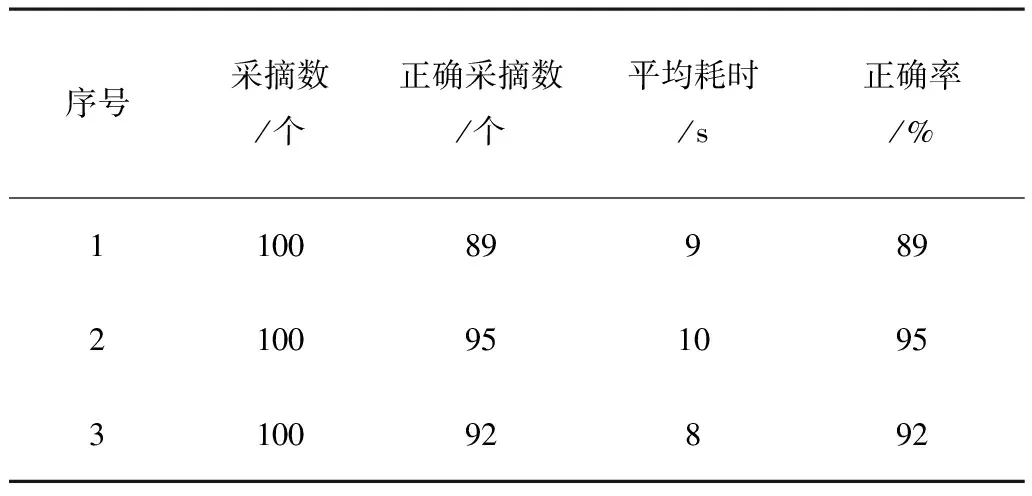
表1 实验结果
由表1可知:在3次采摘试验中,100个采摘目标,采摘机械手正确采摘数超过89个,正确采摘率在89%以上,平均采摘一个果实耗时9s。试验结果表明:该采摘机械手控制系统,能够实现对目标果实的准确采摘,正确采摘率为89%,采摘一个苹果耗时9s,证明该系统的有效性、准确性和可行性。
5 结论
阐述了模式识别技术的概念和特点并从正、逆运动对机械手进行了运动学分析与建模,最后基于模式识别中的图像处理技术,进行控制系统整体设计、硬件设计以软件设计,实现了采摘机械手控制系统。试验结果表明:该采摘机械手控制系统,能够实现对目标果实的准确采摘,正确采摘率为89%,采摘一个苹果耗时9s,证明该系统的有效性、准确性和可行性。
