采摘机器人位置校正方法研究—基于无线传感网络和超带宽调频方法
2019-12-22田二林李祖贺
田二林,李祖贺
(郑州轻工业学院 计算机与通信工程学院,郑州 450002)
0 引言
超带宽技术解决了困扰无线技术多年的有关传播方面的重大问题,具有对信道衰落不敏感、发射信号功率谱密度低、低截获能力、系统复杂程度低及能提供厘米级的定位精度等优点,在无线局域网和个人局域网的应用中,可提供低功耗、超带宽及相对简捷的通信技术。在农田作业环境中,由于通信条件的限制,采摘机器人在作业过程中的通信能力较差,因此对于其定位和导航误差的控制较为困难。如果将超带宽技术引入到采摘机器人通信系统中,结合无线传感网络,将有效地提高采摘机器人的通信能力,提高采摘机器人的位置校正精度,从而提高机器人的作业效率。
1 基于无线传感网络的采摘机器人位置校正方法
完整的无线传感网络主要是由3部分组成,包括传感器节点、任务管理节点和汇聚节点。传感器节点是无线传感网络结构中重要的器件,既具有通信能力,又具有存储数据的能力,其结构如图1所示。
在监测区域的内部或其附近随机部署大量传感器节点,这些节点以自组织方式组建成一个无线网络,各个传感器节点都具有收集信息及监测数据的功能,利用这些监测数据可以实时地定位采摘机器人的位置。
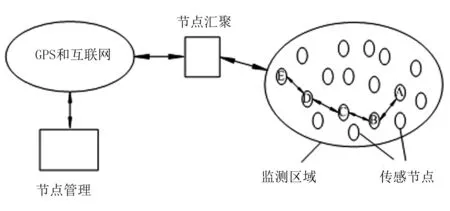
图1 无线传感器网络结构示意图
图2表示基于无线传感网络的采摘机器人位置校正和定位导航过程。在精确定位导航过程中,需要反复地校正采摘机器人的位置。这个过程可以使用超带宽调频方法,利用超带宽脉冲信号,提高位置校正的精度,对于提高采摘机器人的定位导航精度与效率具有重要的意义。
2 超带宽技术特点及调频方法
超带宽技术具有很多无可比拟的优点,如果将其使用在位置校正技术上,可以有效提高定位精度,为位置校正提供可靠的数据。超带宽技术具有系统简单、传输速度快和定位精度高等特点。
1)系统结构简单。超带宽技术采用直接发送脉冲序列的方式,而不使用载波和传统收发设备的变频,省去了混频器和功用放大器等装置,因此使用设备更少,系统更加简单。超带宽系统主要由3部分组成,包括微控制器、时间基和脉冲发射接收器。其中,脉冲发射接收器的前端可以集成在一个芯片上,这3部分便可以构成一个简单的超带宽系统。
2)传输速率高。超带宽技术的传输速率高,其数据的传输速率要高于450Mbit/s,是实现个人通信和无线局域网的一种理想调制技术。超带宽以宽频的方式得到高效的传输速率,可以结合无线传感网络使用而不占用现在的频率资源。
3)定位精确。为了提高定位精度,在实际定位过程中往往采用冲激脉冲的形式,这种形式如果和超带宽技术结合起来,将进一步提高定位的精度。这是由于超带宽无线电具有很强的穿透能力,其在室内和地下室也具有精确的定位功能。
超带宽在调频过程中可以采用线性调频(LFM)的方法,并需要采用匹配的滤波器对脉冲进行压缩。为了从脉冲回波信号sr(t)提取出表征目标特性的τi(表征相对距离)和σi(表征目标反射特性),常用的方法是让sr(t)通过雷达发射信号s(t)的匹配滤波器,如图3、图4所示。

图2 采摘机器人位置校正和定位导航过程

图3 脉冲信号和匹配滤波器
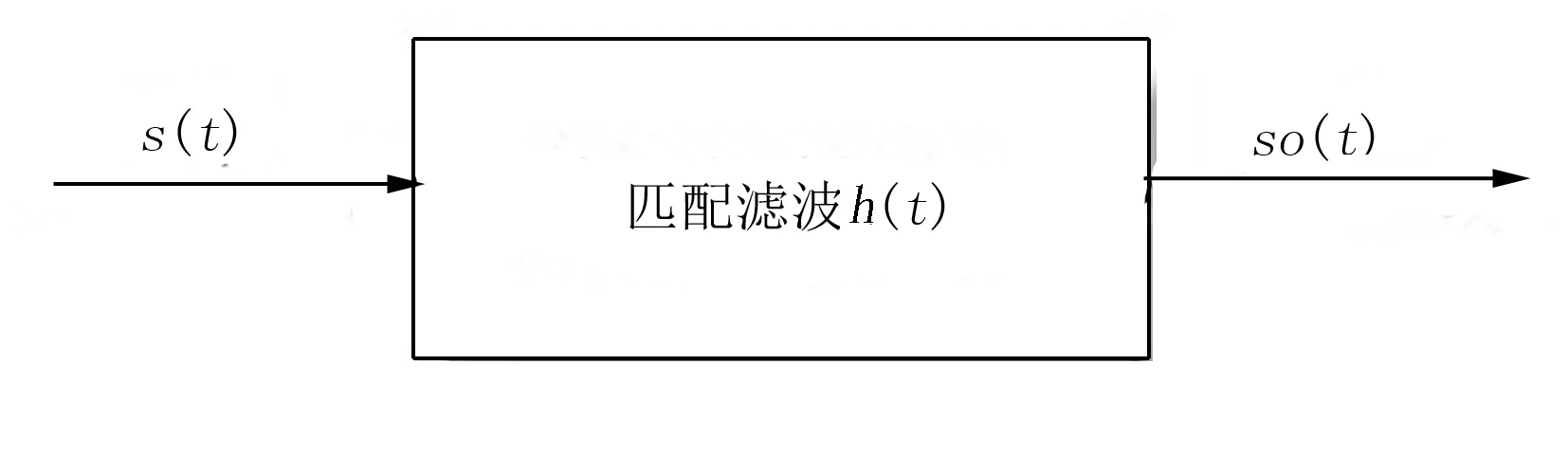
图4 LFM信号的匹配滤波
LFM信号(也称Chirp 信号)的数学表达式为
(1)
(2)
式(2)中的up-chirp信号可写为
s(t)=S(t)ej2πfct
(3)
当TB>1时,LFM信号特征表达式为
(4)
(5)
(6)
对于一个理想的脉冲压缩系统,要求发射信号具有非线性的相位谱,并使其包络接近矩形。设一线性滤波器的输入信号为x(t),则
x(t)=s(t)+n(t)
(7)
其中,s(t)为确知信号;n(t)为均值为零的平稳白噪声。
设线性滤波器系统的冲击响应为h(t),其频率响应为H(ω),其输出响应为
y(t)=so(t)+no(t)
(8)
匹配滤波器的脉冲响应为
h(t)=ks*(to-t)
(9)
如果输入信号为实函数,则与s(t)匹配的匹配滤波器的脉冲响应为
h(t)=cs(to-t)
(10)
其中,c为滤波器的相对放大量,一般c=1。
匹配滤波器的输出信号为
so(t)=so(t)·h(t)=kR(t-to)
(11)
在真正的通信过程中,需要对脉冲进行调制。假设LFM信号的脉冲宽度为T,可以采用匹配滤波器对脉冲宽度进行压缩。信号s(t)的匹配滤波器的时域脉冲响应为
h(t)=s*(to-t)
(12)
将式(12)代入式(1)得
(13)
采用超带宽调频技术可以有效地提高脉冲信号的定位精度,结合无线传感网络,可以实现采摘机器人的位置校正,提高采摘机器人的定位导航精度。
3 基于无线传感网络和超带宽技术的采摘机器人位置校正
为了验证基于无线传感网络的超带宽技术在采摘机器人位置校正中使用的可行性,以温室采摘机器人为研究对象,利用无线传感网络节点设计了通信网络,采用PC处理器进行位置校准,其试验过程如图5所示。
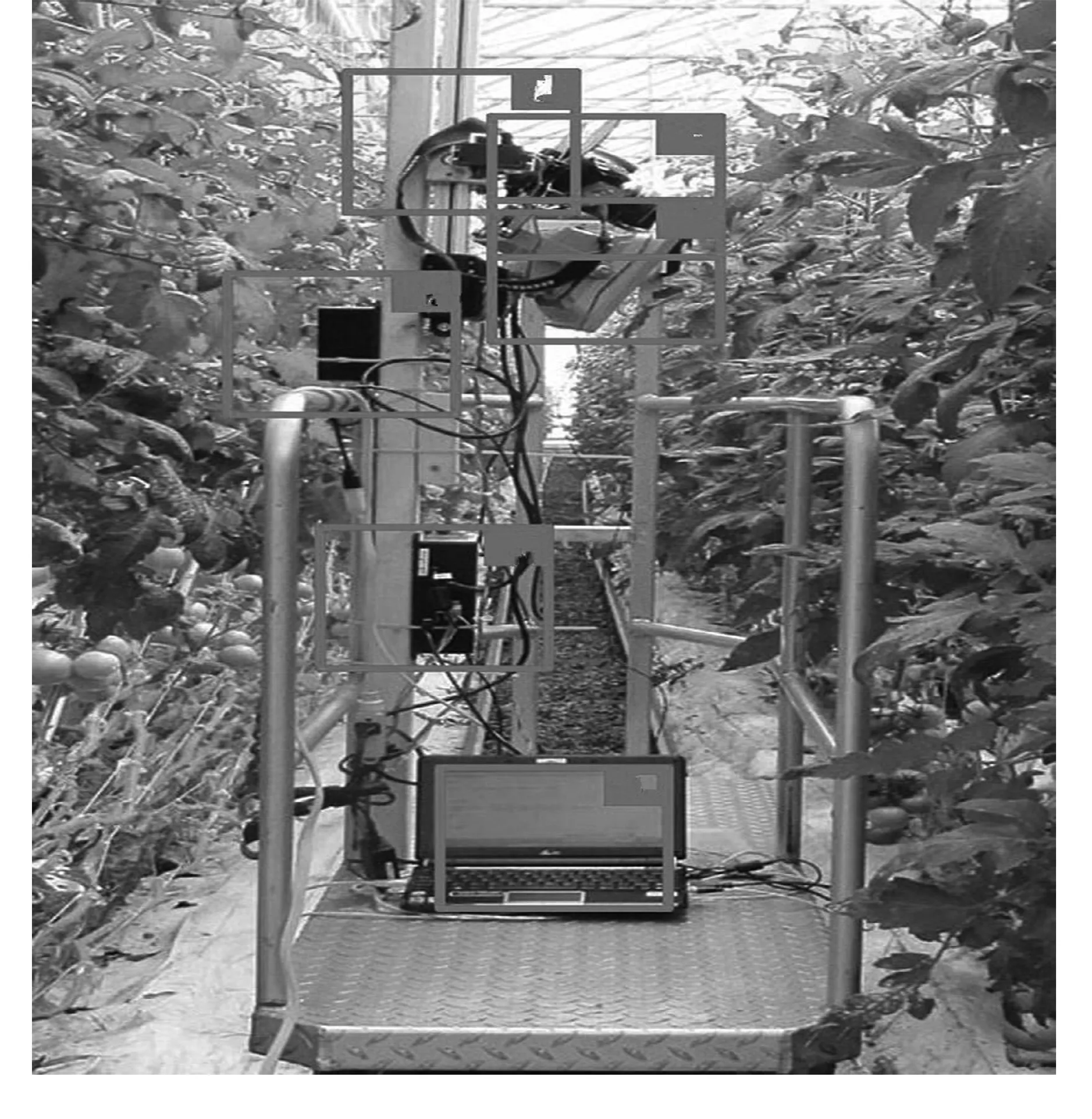
图5 实验用采摘机器人
采摘机器人上搭载了无线传感网络节点,并配备了PC高速处理器,可以将接收信号进行快速处理,并发出采摘机器人动作命令。
图6表示在一个通信区域内布置的网络节点示意图。其中,每个立方体采用4个定位节点,可以完成采摘机器人较大活动范围内的位置校正,通过实验测试得到了如图7所示的结果。
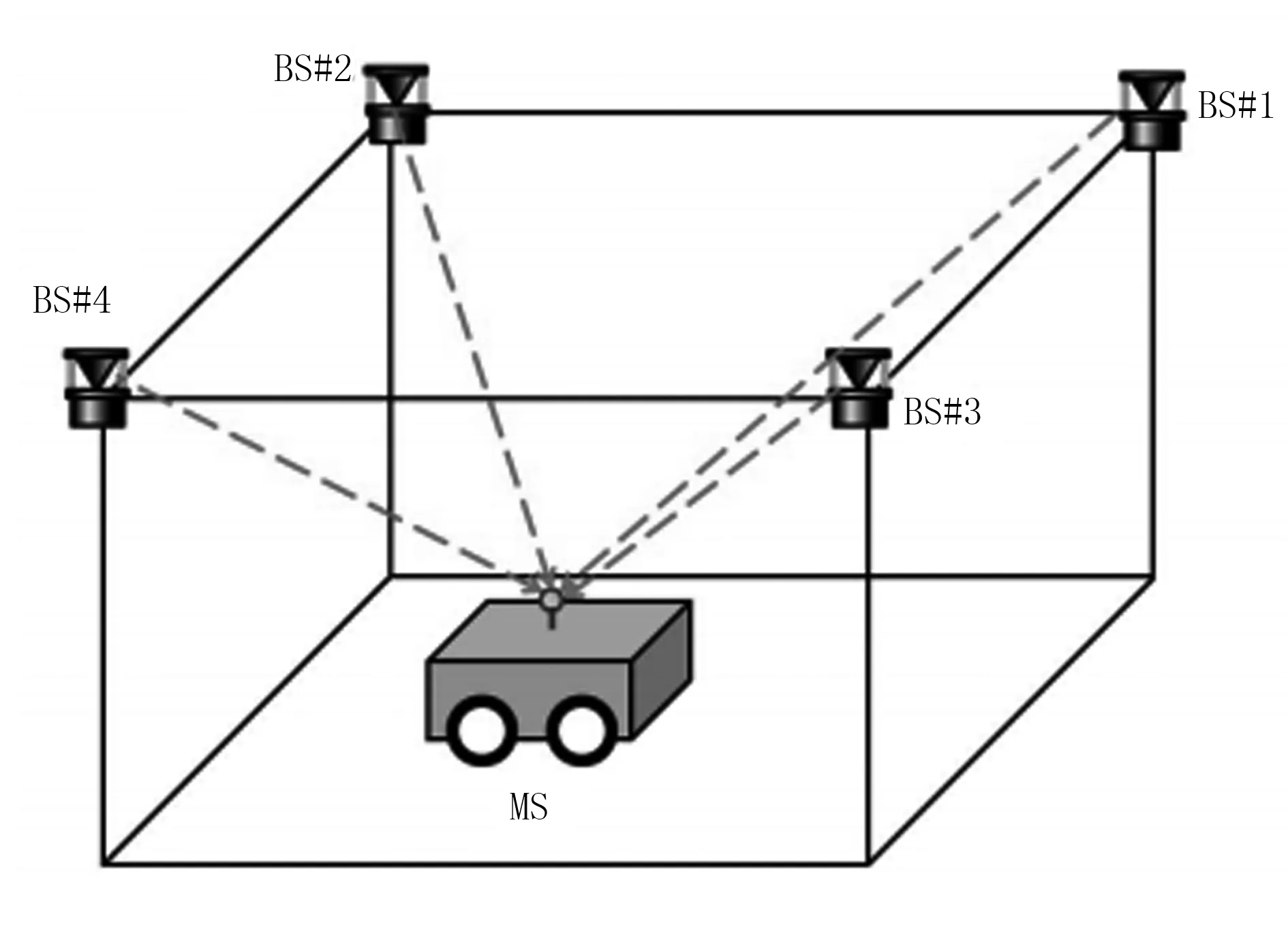
图6 无线传感网络节点分布置图
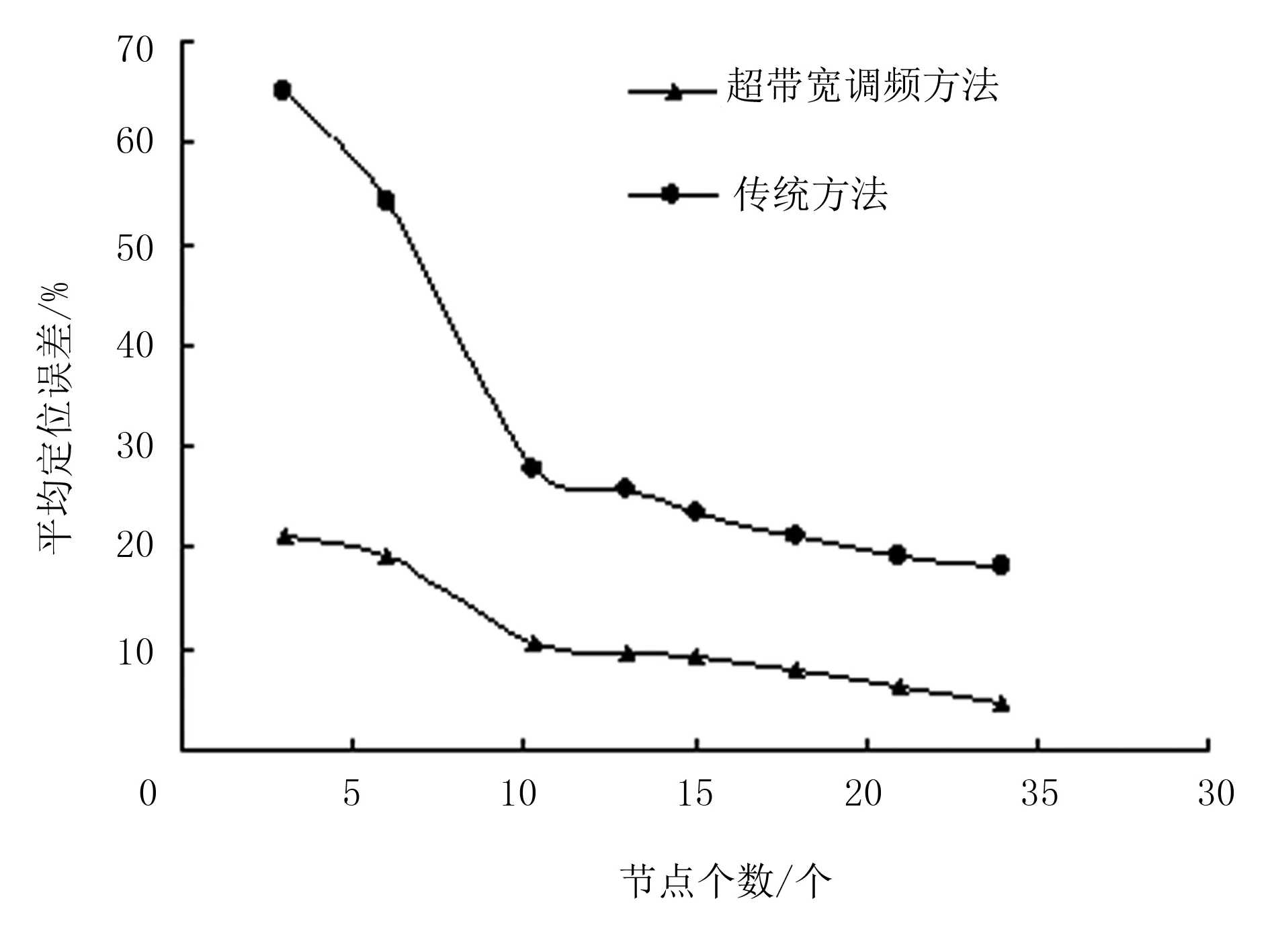
图7 两种定位算法的比较
测试结果表明:采用超带宽调频方法可以明显地提高采摘机器人的定位精度。对定位效率进行了测试,得到了如表1所示的结果。

表1 采摘机器人位置校正效率测试
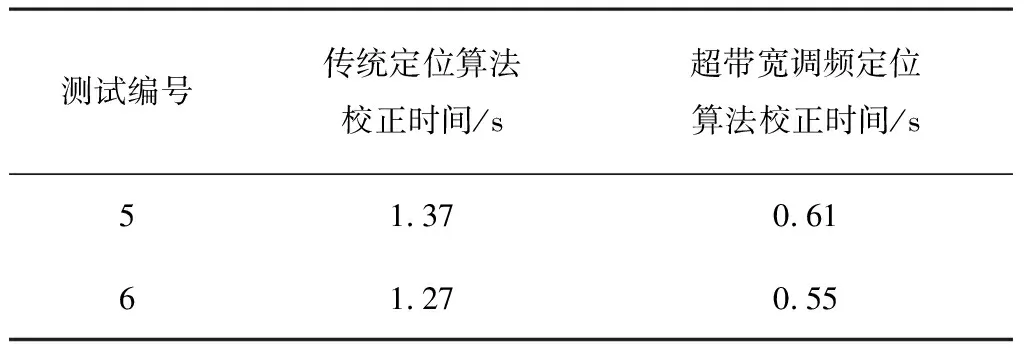
续表1
由表1可知:和传统的定位校正方法相比,超宽带调频方法可以使机器人获得更快的响应速度,校正所耗时间较短。因此,该方法可以在采摘机器人定位导航系统中使用。
4 结论
为提高采摘机器人的定位精度及导航效率,结合无线传感网络,将超带宽调频方法引入到了采摘机器人无线定位系统中,有效地提高了采摘机器人的定位精度和导航效率。为了验证该方法的可行性,在实际的采摘作业环境中对采摘机器人的作业性能进行了测试,结果表明:相对于传统的无线定位方法,超带宽调频方法在机器人位置校正时间和校正准确率上都具有无可比拟的优势,因此可以将其以一种新型的定位方法在采摘机器人的定位导航系统中推广使用。但是,由于超带宽调频技术还是一种新技术,可靠性还有待进一步的验证,待技术成熟后可以在采摘机器人定位技术研究中发挥更大的作用。
