基于域对抗迁移的变工况滚动轴承故障诊断模型
2019-12-20金余丰刘晓锋姚美常黄凤良
金余丰,刘晓锋,姚美常,黄凤良
(1.南京师范大学电气与自动化工程学院,江苏 南京 210046;2.江苏方天电力科技有限公司,江苏 南京 211106;3.南京方一测控科技有限公司,江苏 南京 211102)
0 引言
滚动轴承是机械设备中通用的零件,在工作过程中承担应力、传递载荷,大多处于高转速、重负载、长期连续运行的工况,广泛应用于各行业中[1]。对滚动轴承的智能诊断研究直接关系到机械设备的使用与寿命,具有重要意义。
基于数据驱动的诊断是滚动轴承智能诊断研究中较为深入的一类方法,主要有基于特征工程的机器学习诊断方法[2]和无需特征工程的深度学习诊断方法[3]。其多在定工况的前提下开展,识别准确率较高。然而,机械设备实际运行多为变工况条件,滚动轴承状态受环境影响而非恒定,易导致振动信号的数据分布发生变化,给故障诊断带来严峻挑战[4-5]。因此,有必要对变工况的滚动轴承故障诊断进行深入研究。
变工况下的故障诊断常被归结为不同领域间的自适应问题(简称“领域自适应”)。跨领域的故障诊断是利用一种工况的数据(源域)训练模型,并对训练完成的模型采用适应技术后用于另一种工况(目标域)的故障诊断。研究者多从迁移学习出发解决故障诊断的领域自适应问题。文献[6]基于传统迁移方法,在提取的信号特征基础上,利用迁移成分分析方法(transfer component analysis,TCA),提取了域间可迁移的特征,用于跨域故障诊断。文献[7]使用无标签的目标域数据对源域数据进行归一化,以弱化变工况对故障诊断的影响。随着深度学习技术的发展,基于深度学习的迁移方法也被应用于变工况故障诊断。文献[8]首先对源域数据进行快速傅里叶变换(fast Fourier transform,FFT),无需其他特征提取而直接输入进行模型训练;然后利用少量有标签的目标域数据,对训练完成的模型进行微调以适应不同工况。该方法适用于目标域数据和标签信息可获得的场景。文献[9]无需人工特征工程等工作,直接利用轴承振动信号作为模型输入,通过在归一化层添加统计特征(adaptive batch normalization,AdaBN),将源域和目标域的分布调整至近似一致,在变负载的故障诊断中取得不错的效果。由此可见,深度迁移学习具有特征提取简单、模型迁移性能好的优点,在变工况故障诊断中应用有巨大潜力。
本文基于深度迁移学习,提出一种基于域对抗迁移机制的变工况滚动轴承故障诊断模型。模型以滚动轴承的一维振动工况数据为输入,使用有标签的源域工况数据和无标签的目标域工况数据进行训练,完成对目标域工况数据的分类,进而实现变工况的滚动轴承故障诊断。
1 域对抗迁移方法
Yarolav等[10]率先提出了基于域迁移对抗机制的深度迁移神经网络(domain adversarial neural networks,DANN)。DANN结构如图1所示。
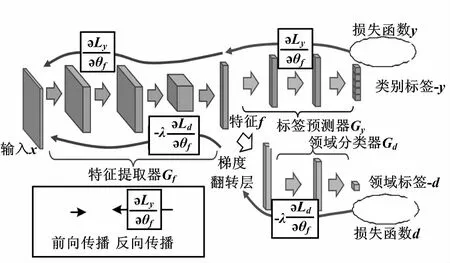
图1 DANN结构图
1.1 基本思想
DANN的结构包含了特征提取器Gf、标签预测器Gy和领域分类器Gd。Gf通常由多层卷积层组成,用于提取信号的特征。Gy由全连接层和Softmax分类器组成,用于预测信号的状态标签。Gd包含梯度翻转层(gradient reverse layer,GRL)、全连接层和Softmax分类器,用于预测信号的领域标签。
以Gf(x;θf)为特征提取器,x为网络的输入,θf为网络层的权重矩阵。Gf提取的特征经Gy(x;θy)得到预测的标签输出,则标签预测器的损失为:
(1)
式中:θy为Gy的权重矩阵;xi为第i个样本;yi为样本的实际标签。
DANN通过添加梯度翻转层和数个标准层来构建领域分类器,实现领域自适应工作。Gf提取的特征经领域分类器Gd(x;θd),可得预测的领域输出,则领域分类器的损失为:
(2)
1.2 优化目标
DANN的优化目标要求Gf尽可能提取可用于区分源域和目标域的特征,同时要使领域分类器Gd无法区分不同领域的差异。根据图(1)的网络结构,DANN的损失由标签预测器损失Ly和领域分类器损失Ld两部分组成。
L=Ly(Ds,ys)+λLd(Ds,Dt)
(3)
式中:Ds为源域数据集,是有标签的数据集;ys为Ds的标签;Dt为目标域数据集,是无标签的数据集;λ为领域判别损失的对抗系数。
对于实际有n个样本的训练集,DANN的总损失可表示为:
(4)
式中:n为源域的样本数;n′为目标域的样本数;N为总样本数。
DANN的优化目标是寻找一组最优参数(θf,θy,θd),使得Gy最小化标签分类损失为:
(5)
同时,Gd最大化领域分类损失为:
(6)
在网络训练时,最小化标签预测器损失和最大化领域分类器损失的对抗,即为模型的对抗迁移过程。在此过程中,模型自动提取出适于不同领域间迁移的特征。
1.3 反向传播与参数更新
DANN的训练过程中,根据图(1)的网络结构及链式求导法则,可求得各参数的梯度更新公式。
(7)
(8)
(9)
2 基于域对抗迁移的变工况故障诊断模型
基于滚动轴承的一维振动信号进行变工况下故障诊断,属于单一源域和目标域的情形。对比定工况下的故障诊断,两个领域分类任务相同、标签空间相同,但振动数据分布发生改变,适宜采用域对抗方法进行解决不同工况下的领域自适应问题。
因此,本文提出一种基于域对抗迁移机制的变工况滚动轴承故障诊断模型。变工况故障诊断模型结构如图2所示。
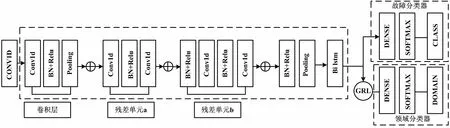
图2 变工况故障诊断模型结构图
从各结构的功能出发,模型可以大致分为三部分:特征提取器、故障分类器和领域分类器。特征提取器由卷积层、残差单元[11]和双向长短记忆(bi-directional long short-term meomory,Bi_LSTM)单元[12]组成。其中:卷积层(Conv 1D)由一维宽卷积核构成,用于提取信号的短时特征;残差单元由带有一维小卷积核残差单元块组成,用于提取信号的高维特征;双向LSTM单元用于实现信号特征的时序表达。故障分类器和领域分类器的两个输出单元均由Dense全连接层和Softmax分类器组成,故障分类器输出振动信号的状态标签,领域分类器输出振动信号的领域标签。模型通过在故障分类器和领域分类器间添加梯度翻转层GRL,实现领域对抗迁移网络的构建;借助在标记数据充足的源域(定工况),实现对目标域(变工况)运行条件下的滚动轴承故障诊断。
一维的振动时序信号作为输入进到特征提取器,经过残差网络完成特征提取,得到振动信号的一组高维特征表达;而后该组特征经过双向LSTM单元得到特征在时序上的表达;得到的特征表达输入到模型的两个输出单元。模型训练测试流程如图3所示。

图3 模型训练测试流程图
3 试验及结果分析
3.1 试验数据
试验以凯西西储大学轴承数据库为基础构建多工况数据集。选取0~3 hp负载的轴承振动数据,每种工况振动数据包含了4种轴承状态,即正常(N)、外圈故障(OR)、内圈故障(IR)和滚动体故障(RB),每种故障状态对应有0.007、0.014、0.021(inch)3种损伤尺寸,共10种轴承标签。轴承状态标签如表1所示。
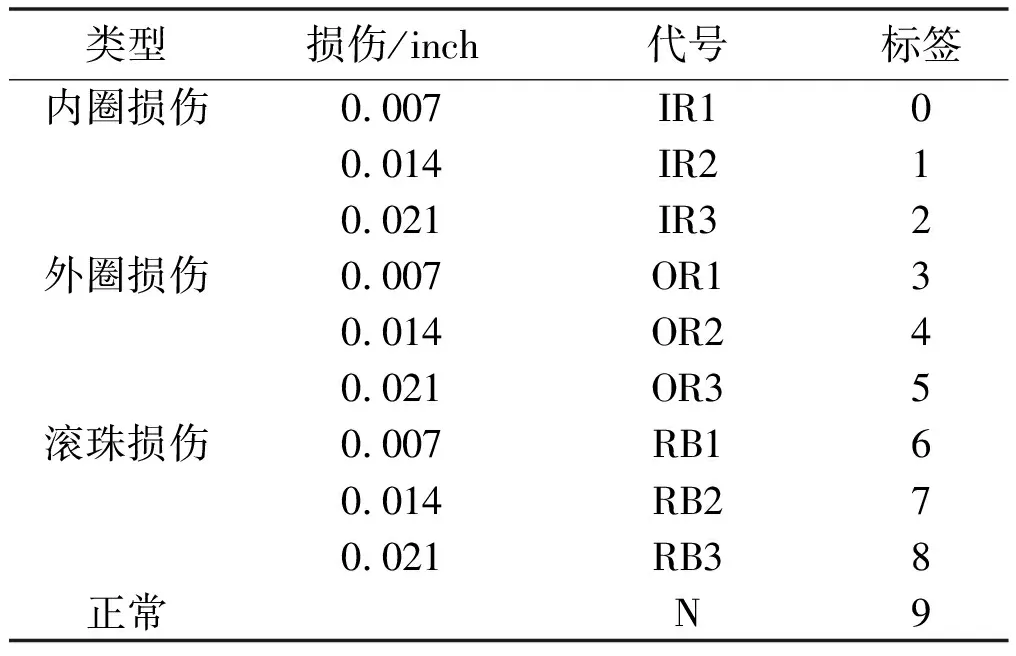
表1 轴承状态标签
根据负载状态进行轴承工况条件划分,工况条件如表2所示。

表2 工况条件
本文所提出模型主要使用有状态标签信息的源域数据对无标签信息的目标域数据进行诊断,有标签数据仅作源域数据时使用。因此,根据表2的工况条件划分,试验主要进行如表3所示的变工况诊断任务。
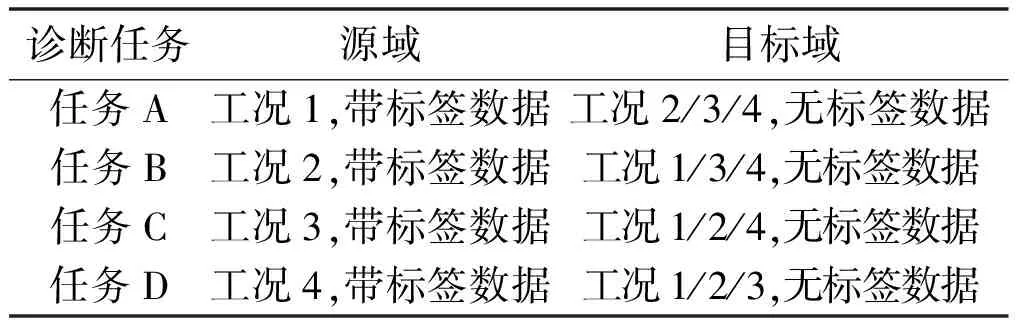
表3 变工况诊断任务
表3以任务A为例,将以工况1为源域数据集,分别对以工况2、3、4为目标域的待诊断数据集进行试验。
3.2 试验设置
试验在TensorFlow框架下搭建实现,采用小批量和Adam梯度优化相结合的方法进行训练。批大小设置为128,模型迭代训练100次。对比试验方面,首先比较模型进行迁移前后的效果提升及差异,即比较本文模型与不含域分类器的基础模型变工况诊断的性能差异。其次,将模型与支持向量机(support vector machine,SVM)、反向传播(back propagation,BP)神经网络、随机森林(random forest,RF)等直接进行跨域的诊断方法进行对比。SVM模型基于时域、频域特征进行故障分类。BP采用小波能量熵和经验模式分解(empirical mode delopmposition,EMD)能量熵进行诊断。RF则采用多种组合特征进行诊断分类。此外,还设置了基于CNN和LSTM的深度学习模型的对比试验。
3.3 结果分析
3.3.1 对抗迁移诊断结果对比
未添加对抗迁移网络的跨域诊断结果如表4所示。
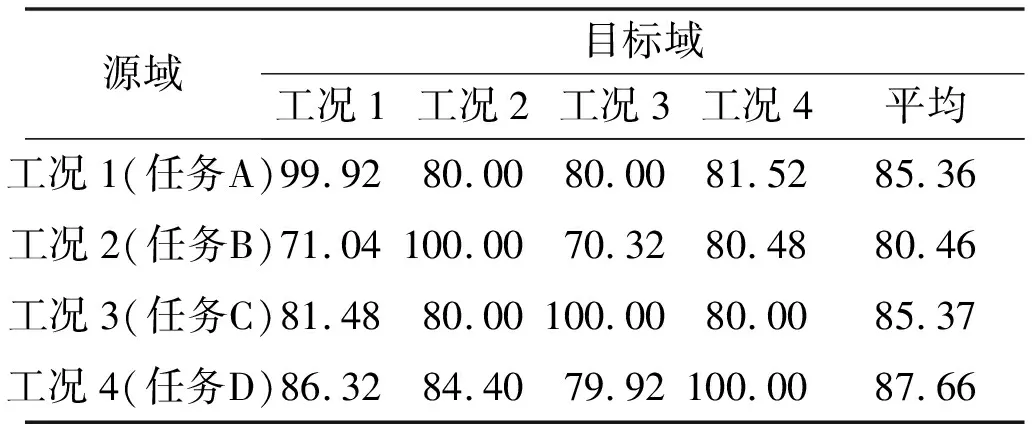
表4 未添加对抗迁移网络的跨域诊断结果
试验使用不含领域分类器的模型(后文称为“基础模型”),即利用在一种负载条件下训练完成的模型,直接对不同负载条件下的轴承进行故障诊断,未涉及领域自适应工作。由表4可知,诊断任务在迁移前的跨域诊断准确率平均值均小于90%,最高的任务D也仅为87.66%,模型的跨域诊断能力有限。以任务A为例,该任务利用工况1的数据进行训练,对工况2、3、4进行跨域诊断测试。模型对工况1的诊断准确率可达99.92%,表明模型对定工况下的故障诊断准确率高。但模型对其他工况条件的故障诊断准确率较低,均在85%以下。这表明模型的领域自适应能力弱,跨域诊断能力有限。
添加了对抗迁移网络后的跨域诊断结果如表5所示。
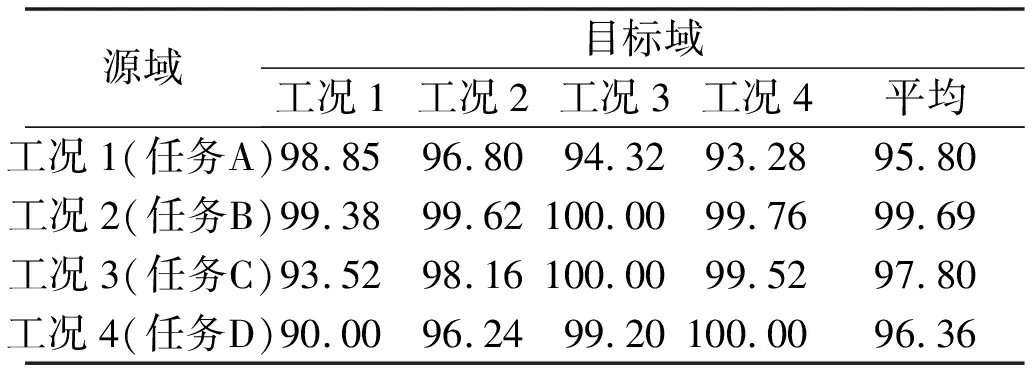
表5 添加对抗迁移网络的跨域诊断结果
由表5可见,域对抗迁移机制显著地提升了变工况故障诊断的效果,各诊断任务的平均诊断准确率均在95%以上,模型的领域自适应能力得到增强。其中,任务B的提升效果最优,由80.96%的平均诊断率提升到了99%的识别率。同样,以诊断任务A为例,迁移模型对于源域数据集保持了98.85%高诊断率,对其他工况的诊断准确率分别提高了约16%、14%和11%。这表明模型的跨域诊断能力得到增强,能够适应多变的工况条件。
3.3.2 故障类别诊断结果
以任务A为例,选取工况1为源域、工况3为目标域进行试验。图4为任务A迁移前后具体故障类别的诊断结果混淆矩阵。

图4 诊断结果混淆矩阵
由图4可知,当模型未进行领域自适应,直接进行跨域诊断时,诊断识别性能不佳。虽能准确识别某些状态的故障(如标签8和9对应的轴承状态,诊断识别率可达100%),但特定标签(如标签2和4)的轴承状态诊断准确率低,标签2只有24个样本被分类正确,标签4的样本无法识别。
对比图4(a)、图4(b)可知,迁移后的模型在故障类别上的诊断表现得到显著提升。其中,标签4的状态信息原本无法识别,现可以完全识别;标签2状态仍表现不佳,但也有一半的样本被正确分类。
对比如表6所示的各故障类型诊断效果提升情况,标签4的状态信息由无法识别变为可完全识别;标签2状态虽仍表现不佳,但已有一半的样本被正确分类;目标域综合诊断准确率由89.52%提升至94.28%。由此可见,添加迁移机制之后的模型在具体故障类别上的诊断表现得到显著提升。

表6 各故障类型诊断结果提升情况
本文所提出模型与其他跨域诊断模型的诊断效果对比,如表7所示。

表7 各诊断模型诊断效果对比
由表7可知以下结果。①任务C中基于LSTM的模型跨域诊断准确率低于基于随机森林和BP网络的方法;任务D中LSTM则比SVM低了5%左右。由此可见,在无领域自适应工作的情况下,LSTM方法与基于特征工程的方法相比,并不占优势。②CNN、基础模型等基于深度学习的诊断方法跨域诊断准确率高于基于特征工程的方法,说明基于特征工程的方法难以胜任变工况下的故障诊断。③基础模型在诊断任务A、B中诊断准确率优于其他深度模型,但除任务B之外其他诊断准确率均在90%以下,跨域诊断表现一般。④基于域对抗迁移的模型诊断将诊断任务B的准确率提升到了99%左右,在各诊断任务中均为最高;而且其他模型表现不佳的诊断任务A也达到了95%的诊断准确率。这说明模型的跨域诊断能力好,能够适应复杂工况下的故障诊断。
3.3.3 可视化分析
选取任务A,以工况1为源域、工况3为目标域进行诊断试验,利用t-SNE算法对提取的特征进行可视化,直观理解模型的迁移分类过程。特征t-SNE可视化对比如图5所示。图5中:“o”为源域数据的特征输出;“*”为目标域特征输出;右侧彩条表示不同故障标签对应的颜色。
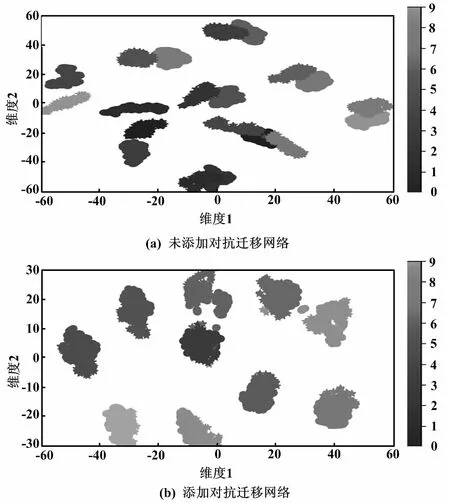
图5 特征t-SNE可视化对比图
图5(a)是未添加对抗迁移网络的特征输出。对于源域工况1,特征提取器提取的特征已可区分来自源域的故障类型,目标域工况3提取的特征之间区分性也很大。但此时模型训练基于有标签的源域数据完成,模型学习拟合的是源域工况1的数据分布。目标域数据与源域数据分布的不一致,会导致故障分类器错分故障类型。图5(b)为添加了对抗迁移网络的特征输出,提取到的工况1和工况3的特征基本重合,表明在对抗迁移机制的作用下,模型提取了在工况1和工况3均适用的可迁移特征。由此可以说明,尽管源域和目标域的数据分布不一致,但对抗网络能够利用有标签的源域数据和无标签目标域数据,提取的可迁移表征的分布基本一致,有效地提高了模型跨域诊断能力。
4 结束语
本文提出了一种基于域对抗迁移的变工况故障诊断模型。该模型以滚动轴承的一维振动信号作为输入,通过残差网络和双向LSTM完成特征提取,在故障分类器和领域分类器之间添加梯度翻转层实现领域对抗,最终实现变工况的滚动轴承故障诊断。
通过对比添加域对抗机制前后的诊断表现,验证了该方法能够有效提升变工况诊断任务的表现;通过与其他直接跨域诊断模型的对比,验证了模型在变工况故障诊断中具备准确率高的优势;通过提取特征的可视化分析,验证了模型提取的特征能够适用于不同工况下的诊断任务。
