基于改进Camshift的红外转炉钢流自动检测与跟踪
2019-12-20李艳丽
李艳丽 ,潘 炼 ,杨 成 ,张 巩
(1.武汉科技大学 信息科学与工程学院,武汉 430081;2.武汉中飞扬测控工程有限公司,武汉 430345)
近年来,钢铁企业对提升产品档次,改善钢水质量,降低冶炼成本的要求越来越高,使得转炉出钢过程中钢渣含量的检测具有重要意义。减少转炉出钢的下渣量是提高转炉炼钢产品质量,提高钢水收得率,降低炼钢生产成本最有效的途径之一。
目前,国内外使用较多的转炉出钢检测方法有:人工视觉观察法、电磁检测法和红外图像法[1]。其中,人工视觉观察法具有很大的主观性;电磁检测法具有准确和实时的检测优势,但电磁线圈安装过程繁琐,且长期暴露在高温环境下,使用寿命短,维护费用高;红外图像法利用钢水和钢渣的红外辐射温度差异,转换成图像,经图像处理后检测其中钢渣含量并分析渣占比,渣占比超过阈值后报警,启动挡渣操作,提高钢水质量。利用红外图像实时检测转炉下渣具有不受光源、高温热源的影响,远距离监控等优点,在钢铁行业得到广泛应用。
红外转炉钢渣检测传统方法存在将钢口钢渣、钢包溅渣识别为钢流钢渣的误差,导致渣占比偏大,挡渣操作提前,使钢水收得率低,系统实时性较差。而且在出钢加合金过程中因化学反应产生的浓烟遮挡钢流,而无法获知实际出钢情况。对此,提出改进的Camshift[2]自动检测与跟踪算法,采用二值法分割钢流图像,检测目标轮廓特征标定最小外接矩形[3];增加相邻两帧图像跟踪框质心欧氏距离判断。
1 系统的结构设计
红外转炉下渣原理是基于普朗克辐射分布定律和维恩位移定律,任何只要温度高于绝对零度的物体,每一时刻都在向外辐射出红外线。科学研究表明,红外辐射以及其他光辐射与组成物质的原子、分子的运动密切相关,物质稳定越高表明其发射的红外辐射越强[4]。
转炉红外下渣系统基本框图如图1所示。系统核心为高温红外热像仪测温设备(包括不锈钢材质的双层护罩),配有红外滤波衰减片及红外长焦镜头。安装在具备良好钢流观测视角的位置,一般为炉后或炉前下渣道附近。系统将采集的钢流红外图像信息传至主控室,通过上位机分析处理,计算并显示出钢流中渣占比。
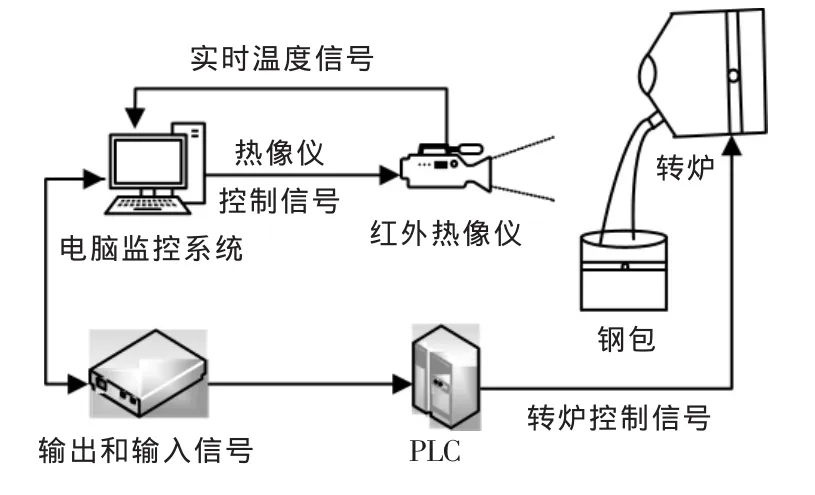
图1 转炉出钢系统原理Fig.1 Schematic of converter tapping system
2 Camshift目标跟踪算法
Camshift算法即连续自适应的Meanshift跟踪算法[5]。该算法对于背景简单、非刚性、有形变的目标,能够自适应跟踪框的大小,精确跟踪目标,且算法复杂度低,计算量小,实时性好。Camshift采用密度直方图中“爬山”算法,对数据直方图进行多次迭代,沿着数据密度分布梯度的方向找到最大相似度的目标区域[6],实现目标跟踪。其主要步骤如下:
步骤1 获取视频的第一帧图片,将其从RGB空间转为HSV空间,并提取H(色调)通道;
步骤2 手动初始化第一帧搜索框W1,确定目标的大小和位置;
步骤3 对初始化区域进行统计得到颜色直方图,根据颜色直方图反向投影得到当前帧的概率分布投影图;
步骤4 根据颜色概率分布图计算搜索框W1的零阶矩M00,得到搜索框W2的长和宽。计算W1的一阶矩M10和M01,由零阶矩和一阶矩得到搜索框W2的质心位置(xc,yc),调整搜索框 W2的大小 S,最后移动搜索窗口 W1的中心 IW1(xc,yc)到 W2的质心IW2(xc,yc),当质心的移动距离收敛于设定的阈值时停止迭代,否则返回步骤3执行,收敛后读取下一帧图像并以当前框的位置信息作为下一帧的初始搜索框,重复执行步骤3和步骤4。
零阶矩、x和y的一阶矩分别为

式中:I(x,y)为图形中坐标点(x,y)处的像素值;M00为零阶矩;M10为一阶矩,即x的期望值;M01对y的期望值。由零阶矩和一阶矩,得到搜索框的质心位置 I(xc,yc)为

式中:xc和yc分别为质心横坐标、纵坐标。二阶矩为

式中:I(x,y)为图像(x,y)处的像素(概率)值。 Camshift目标跟踪算法流程如图2所示。
Camshift算法是一种基于颜色直方图信息的半自动跟踪算法,需要人工选取第一帧的搜索窗口,而且只采用HSV颜色模型H通道的颜色信息,当目标发生遮挡或者背景有相似颜色干扰时,该算法容易丢失跟踪目标[7]。

图2 Camshift目标跟踪算法流程Fig.2 Camshift target tracking algorithmic flow chart
3 选取目标边缘轮廓以及最小外接矩形
3.1 选取目标边缘轮廓
外部曲线轮廓由一系列坐标点的集合来表示。逐行逐个扫描像素点得到目标最外层轮廓,具体的最小外接正矩形轮廓特征获取步骤如下:
步骤1 将二值化后的图像按照从左至右、自上而下的顺序扫描每一个像素点。
步骤 2 当像素点(i,j)满足图3,且按有序数字递增的最外层边界数LNBD=0时,(i,j)定义为外边界的开始点位置。
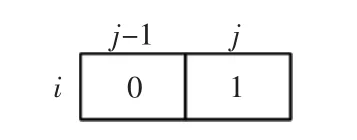
图3 外轮廓边界开始点Fig.3 Outer contour boundary start point
步骤3 沿着开始点标记边界上的像素。标记方法为:如果当前轮廓是在0像素区域(包含(p,q+1)位置的像素点)和 1像素区域(包含(p,q)位置的像素点),则将(p,q)处的像素值改为-2;其他情况将(p,q)点的像素改为2,因为图片最左列、最右列、最上列和最下列为图片框架,被设置为1。
步骤3 扫描过程中,非边界非零点的像素值赋值为LNBD,每重新扫描一行时LNBD置0。图片扫描和标记示例如图4所示。图中,外边界由“#”,“2”和“:”组成,其中“#”为外边界的开始点,“:”代表“-2”。

图4 轮廓检测标记示例Fig.4 Outline detection marker example
3.2 获取最小外接矩形
由边缘轮廓标记,得到的外部边界曲线坐标为

式中:xg,xh分别为外部曲线边界最大横坐标、最小横坐标;yg,yh分别为外部曲线边界最大纵坐标、最小纵坐标;a,b分别为最小外接矩形的长、宽。
4 基于轮廓特征的Camshift目标跟踪算法
以跟踪钢流作为试验目的,将红外摄像头采集的热辐射温度信号转换成视频图像,并显示在计算机上,先用均值滤波去除图片中的噪声,直方图均衡化增强图像对比度,以及形态学处理。未加合金前,钢流和背景分别呈现红色和黑色,试验对象颜色对比鲜明,目标轮廓清晰且呈矩形状。采用二值法对图像进行分割,可以得到较为满意的分割效果。经测试,当二值法阈值为317时分割效果良好,选取出钢视频第233帧有遮挡图片进行二值化,钢流二值化图像如图5所示。由图可见分割效果明显。

图5 钢流有遮挡二值化图像Fig.5 Steel flow with occlusion binarized image
检测第一帧图片中钢流的最小外接矩形轮廓,作为Camshift初始化搜索框,实现全自动跟踪。出钢过程中加合金产生浓烟遮挡钢流,发生目标漂移和丢失,引入欧氏距离d。当d大于阈值θ,重新检测目标最小外接矩形轮廓,更新钢流颜色特征。算法流程如图6所示。

图6 基于轮廓特征的Camshift算法流程Fig.6 Flow chart of Camshift algorithm based on contour feature
欧氏距离d为

式中:(x2,y2)为当前帧跟踪框质心坐标;(x1,y1)为前一帧跟踪框质心坐标。
5 试验以及结果分析
5.1 试验环境搭建
试验平台采用Windows 7,处理器为Intel(R)Core(TM)i5-3210M CPU 2.50 GHz,RAM 为4 GB。系统下使用Visual Studio 2017作为开发环境,结合OpenCV3.1.4视觉库,对武汉中飞扬公司转炉下渣项目,实现钢流目标的跟踪。采用德国欧普士PI 1M型高温红外热像仪测温设备,其测温范围为200~1800℃,显示像素为764×480,波长为7~14μm,采集速率为1 kHz。
5.2 第一帧搜索框检测试验
由于钢流本身持续运动,手动初始化目标区域一般大于或小于目标本身。对第一帧搜索框分别采用Camshift算法,并手动初始化搜索框和改进Camshift自动检测搜索框方式。试验效果对比如图7,8和 9所示。

图7 Camshift算法手动初始化搜索框小于目标Fig.7 Camshift algorithm manually initializes the search frame smaller than the target

图8 Camshift算法手动初始化搜索框大于目标Fig.8 Camshift algorithm manually initializes the search frame larger than the target

图9 Camshift算法改进后的自动初始化搜索框Fig.9 Automatic initialization of search frame after improvement of Camshift algorithm
由图可见,手动初始化框小于钢流目标时,传统的Camshift跟踪,只能够跟踪到小部分的目标;手动初始化框大于钢流目标时,传统Camshift跟踪,跟踪框将深色背景和钢流一同识别为目标。手动选取方式会将出钢口的钢渣误判为跟踪目标。而采用改进的Camshift自动检测,可以准确跟踪整个钢流目标。
5.3 相似颜色粉尘状遮挡物试验处理结果分析
向钢包加入合金,产生与钢流相似颜色粉尘状遮挡物时,分别采用传统的Camshift算法和改进算法对钢流进行跟踪试验,选取第171,194,233帧做跟踪效果对比。跟踪效果的对比如图10,11所示。

图10 Camshift算法有遮挡物跟踪效果Fig.10 Camshift algorithm with occlusion tracking effect
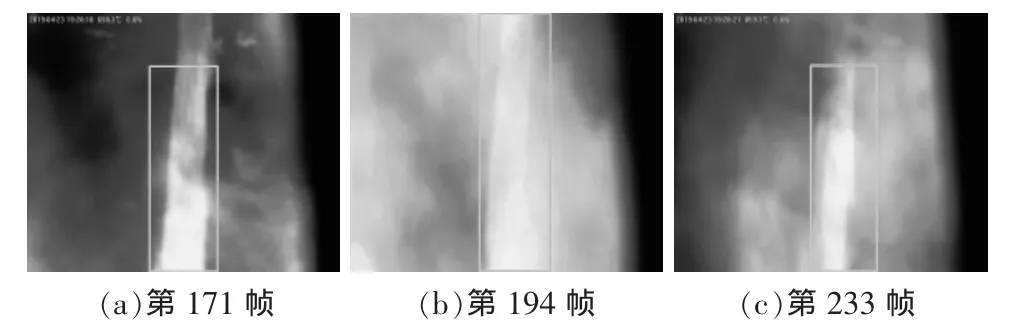
图11 改进Camshift算法有遮挡物跟踪效果Fig.11 Improved Camshift algorithm with occlusion tracking effect
由图10可见,当粉尘状颗粒物漂浮在钢流周围时,钢流的红外图像颜色特征改变,传统的Camshift算法会出现跟踪框漂移。由图11可见,改进Camshift算法更新钢流目标的颜色特征,并能长时间准确跟踪目标。出渣期Camshift算法改进前、后的跟踪效果对比如图12,13所示。通过对比可见,改进后跟踪框不包括出钢口钢渣,且准确跟踪钢流。

图12 出钢时Camshift算法跟踪效果Fig.12 Camshift algorithm tracking effect when tapping

图13 出钢时Camshift算法改进后跟踪效果Fig.13 Improved camshift algorithm tracking effect when tapping
改进Camshift算法应用于武汉中飞扬公司的转炉下渣检测项目,分别采用传统红外检测算法和改进Camshift算法进行试验验证。数据的对比见表1,表 2。
采用改进算法后,测试30个钢包中钢渣厚度其中有74.59%在30 mm以下;平均渣厚比传统红外下渣检测少5.29 mm,减少幅度为9.88%。
6 结语
本文提出了一种基于改进Camshift的红外转炉钢流自动检测与跟踪算法。将钢流的最小外接矩形轮廓特征和Camshift颜色特征结合,实现自适应准确跟踪,排除了出钢口和钢包溅渣对渣占比计算精度的影响;增加欧氏距离因子判断,解决了跟踪漂移等问题。试验结果表明,该方法避免了因转炉倾角改变导致无法准确计算含渣量的情况,准确判断出钢时间,减少了钢包中钢渣的含量,钢水质量得到保证。
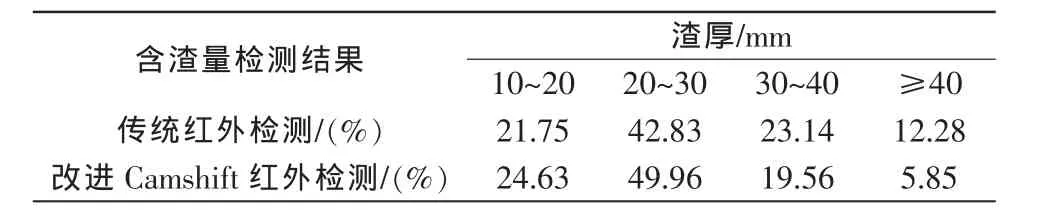
表1 含渣量检测试验结果对比Tab.1 Comparison of experimental results of slag detection

表2 平均渣厚检测结果对比Tab.2 Comparison of average slag thickness test results
