自抗扰控制器设计
2019-12-19朱家兴符玉珊
朱家兴 符玉珊
摘 要:本文分析研究自抗扰控制器(ADRC)的基本原理及其发展过程,除了包括深入分析自抗扰控制器(ADRC)的基本框架和各模块的具体形式之外,还包含自抗扰控制器的设计问题。自抗扰控制器(ADRC)能完成参数整定的基本理论及其参数整定的方法,在论文中的扩张状态观测器(ESO)这一模块则选择了单纯型法进行参数整定,另外两个模块则用算法进行整定。
关键词:自抗扰控制器(ADRC);扩张状态观测器(ESO);参数整定;仿真
1 绪论
本文采用理论与仿真相结合的方法,研究分析了自抗扰控制技术的基础原理、基本框架和各模块形式,著重分析自抗扰控制器参数整定的理论、自学参数整定的方法。
2 自抗扰控制器的结构
自抗扰控制器分别由跟踪微分器(TD)、扩张状态观测器(ESO)、非线性状态误差反馈(LSEF)这三部分组成。跟踪微分器(TD)除去可以跟踪参考输入信号v(t)和安排预期过渡过程这两个作用之外。扩张状态观测器(ESO)的用处是能使系统对象的状态变量估计值和系统模型及扰动因子的总和作用的估计值,然后其作用能使被控对象变为“积分器串联型”。
3 自抗扰控制器的设计
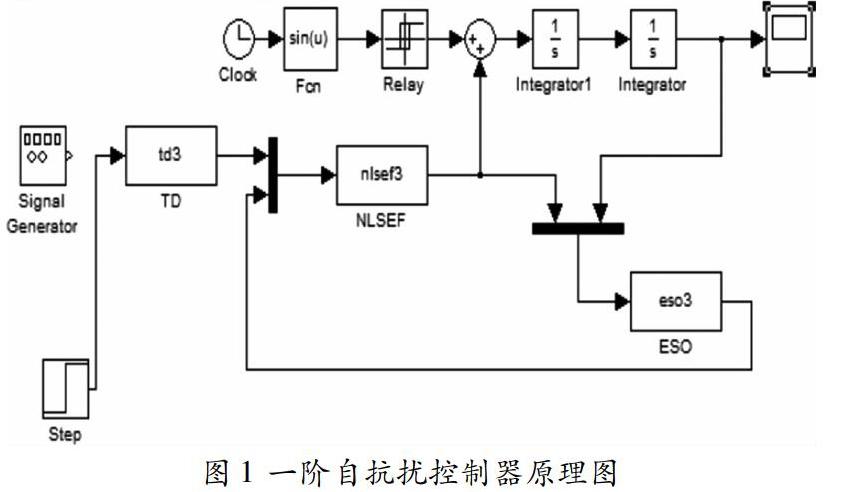
经过编程,分别创建跟踪微分器 TD 的 S-函数TD、扩张状态观测器 ESO 的 S-函数 ESO、非线性状态误差反馈律NLSEF 的 S-函数 NLSEF,将其进行组合得到一个ADRC系统。自抗扰控制系统(ADRC)的仿真框图如图1。
4 自抗扰控制器的参数整定
4.1 跟踪微分器的参数整定
在自抗扰控制器中,跟踪微分器(TD)的作用一般有两个:第一个是给出输入信号v的理想过渡过程信号v1,作用是起到柔化并且不光滑的输入信号的作用,在这里它能减少控制过程输出的超调和振荡。
4.2 状态扩张观测器的参数整定
根据计算,取初值k1=10,k2=20,k3=30,b0=1,寻优200步,最后得到的结果为21.5,103.22,226,10,然后再取参数20,100,220,10,得到系统的阶跃曲线如图3所示。
4.3 反馈控制律(NLSEF)的参数整定
二阶非线性反馈控制律(NLSEF)当中的参数k1和k2,它们的整定也与PID控制器的整定类似。减小系统的静态误差可以增大k1,并且提高精确性,但是这样有可能使动态性能变坏,从而引起震荡,甚至有可能造成不稳定。对于k2而言,增大k2,这样可以在一定程度上提高系统的跟踪精度,使系统的动作速度加快,从而改变系统的动态性能,最后能够达到很好的跟踪效果。针对k1和k2,由于系统性能的影响是通过微分信号造成的,在选择参数时,应该重点考虑k2,且大多数都是使k2大于k1(k2>k1)。
5 总结
本文主要研究了自抗扰技术,通过自抗扰控制的基本原理和各模块形式,形成了自抗扰控制器(ADRC),利用Simlink建立了自抗扰控制器的模型,进行了参数的整定,最后在通过仿真来验算算法的有效性。
参考文献:
[1]韩京清.自抗扰控制技术[M].北京:机械工业出版社,2003.
[2]胡寿松.自动控制理论[M].北京:科学出版社,2007.
[3]刘豹,唐万生.现代控制理论[M].北京:机械工业出版社,2006.
[4]韩京清.自抗扰控制技术[J].前沿科学季刊,2007,(1):24-31.
