双通道数控系统桁架式机械手防碰撞设计及应用
2019-12-19王有波
王有波
(海纳川(滨州)轻量化汽车部件有限公司,山东滨州 256602)
0 引言
在大型自动化生产线中,桁架式机械手因其自重轻、跨度大、施工方便等优点得到了广泛应用。大工件硬氧设备采用的基于力士乐(Rexroth)双通道数控系统控制的双桁架机械手,实现工件自动上料下料、硬氧等搬运工序,保障了零件产品质量,提高了工作效率,减小工人劳动强度。
某桁架式硬氧设备采用Rexroth MTX micro 双通道控制系统,分别控制两台桁架机械手。如果没采取防碰撞措施,当一台桁架机械手处于公共区域(清洗槽)内、另外一台桁架机械手向公共区域位置移动时,两台机械手就存在极大的碰撞风险,这样不仅会损坏机械装置及电气元件,而且还会给生产造成严重影响。为了防止上述风险的发生,下面就如何实施防碰撞措施进行分析,主要包括硬件安装和软件设定两个方面。
1 基本构成及布局
桁架式硬氧设备为大工件硬氧自动线,除了人工装卸工件以外,其他动作均自动完成;工件氧化工位与清洗工位分开,采用两个氧化槽和一个清洗槽设计,两台桁架机械手分别自动进行工件的氧化和清洗。两个机械手用于工件的搬运,每一台机械手上装载一套工装,分别负责一个硬氧槽。机械手在硬氧槽位置完成相应工作后,要移动至清洗槽位置进行工件的清洗工作[1]。清洗槽是两台机械手的公共区域,两台机械手在此区域内工作时必须保持安全距离、不能发生碰撞,因此必须做好安全有效的防碰撞措施:当清洗槽内有机械手工作时,另外一个机械手需要在硬氧槽上方等待。
2 防碰撞措施
2.1 安装防碰撞开关
1#和2#两台机械手上分别安装有“防碰撞”检测开关,检测开关采用中距离激光测距传感器,检测范围为200~1000 mm,90%反射率,分辨率为1 mm,接入数控系统高速输入端口。根据硬件安装情况设定“防碰撞”检测开关的最小安全距离值,当两台机械手的距离小于该设定值时就会输出24 V 信号,数控系统立即检测到该信号,从而禁止另外一台机械手继续向公共区域方向移动。只有该检测开关信号消失后,另外一台机械手才可向公共区域方向移动。1#机械手防碰撞触发“禁止读入”及“轴锁”的PLC 控制程序如图1 所示。
当1#机械手防碰撞检测信号被检测到时,触发“0911”号报警,报警响应为“禁止读入”及“禁止进给”,同时将2#机械手水平轴的轴锁信号“DriveLock”激活,从而禁止2#机械手向公共区域方向移动。
2.2 安装公共区域检测开关
1#、2#机械手工装上分别安装两个接近开关,公共区域安装感应块,当任何一个机械手进入公共区域,接近开关检测到感应块时,数控系统立即响应锁定信号,禁止另外一台机械手进入该公共区域。另外一台机械手在公共区域外等待,只有当该机械手完全离开公共区域后,另外一台机械手才可进入公共区域。1#机械手公共区域检测及凸轮开关信号激活的PLC 控制程序如图2 所示。

图1 防碰撞触发“禁止读入”及“轴锁”

图2 公共区域检测及凸轮开关信号激活
其中,图2a)为:当1#机械手公共区域检测信号或凸轮开关信号任一信号被激活时,会给2#机械手发送信号“1#机械手处于公共区域内”;图2b)为:当1#机械手处于公共区域时,2#机械手在移动过程中检测到公共区域信号或凸轮开关信号时,激活2#机械手信号“X2_KeepStop”,此信号用于激活2#机械手水平轴X2 的轴锁信号“DriveLock”,禁止2#机械手向公共区域方向移动直至锁定信号消失。
2.3 凸轮开关设置
PLC 中设定凸轮开关,并读取当前机械手水平轴位置。当读取位置值小于凸轮开关设定值时,凸轮开关信号激活,即该机械手已进入公共区域。凸轮开关设定如图3 所示。
程序段1 用于读取轴当前位置,程序段2 用1#机械手水平轴实际位置与PLC 变量DB21[1]中设定值进行比较,DB21[1]设定值为1#机械手进入公共区域的水平轴的位置值,当1#机械手水平轴的实际位置值小于设定值时,激活1#机械手凸轮开关信号,即1#机械手进入公共区域限制另一机械手进入公共区域[2]。
在完成PLC 编程后,只要数控系统检测到任一机械手进入公共区域后,都会发出报警信息,从而限制另一机械手进入此公共区域。也就是说,只有该机械手完全离开公共区域后,另一机械手方可进入。
2.4 一维防碰撞设置
一维轴碰撞监控功能用于监控机械手水平轴Pos(1)、Pos(2)位置,下限值≤Pos(1)±Pos(2)≤上限值,离开受监控的区域将启动错误报警。此处用于监控机械手水平轴位置的和或差值,调试时将两个轴移动到期望的“碰撞限位”,碰撞限位是指危险情况下两个轴的临界间隙。其NC 参数详细设定见表1。
激活一维轴碰撞监控功能,将EnablCollMon 设定为yes;设置需要监控的轴,将1#机械手水平轴轴号1#、2#机械手水平轴轴号3 分别写入DrlndMon-Ax1、DrlndMonAx2 参数中;定义两个相关轴的坐标系方向DirCollMon 设置为1;在下限值PosLowLim写入期望的“碰撞限位值”,当两个机械手水平轴位置之和小于下限值PosLowLim 中的数值时,系统就会启动错误报警,限制两机械手继续向公共区域方向移动,从而防止发生碰撞。
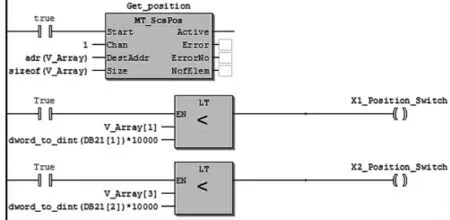
图3 凸轮开关设定
3 结束语
桁架式机械手因为其实用性将得到广泛应用,但是其防碰撞措施是必须采取的,在硬件检测开关选型、安装、软件设定、控制逻辑等方面都要充分研究分析,从多方面考虑才能保障其安全性。桁架硬氧设备中的防碰撞应用,通过软硬件结合的多重措施有效的防止两机械手在运行过程中发生碰撞,从而减少碰撞风险,大大提高设备的工作效率。
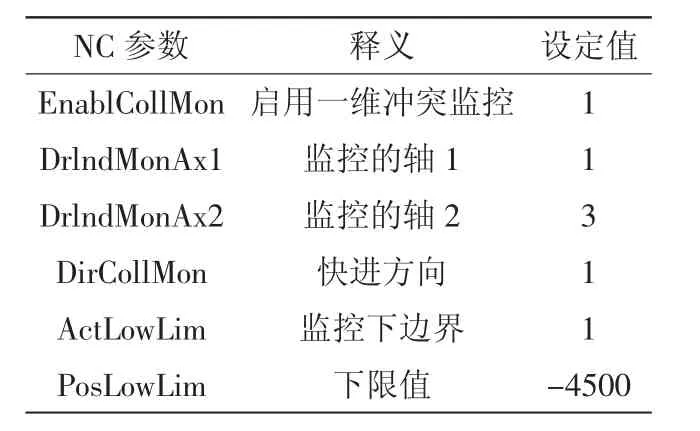
表1 NC 参数设定
