可穿戴下肢外骨骼康复机器人研究现状与发展趋势
2019-12-18李龙飞朱凌云苟向锋
李龙飞,朱凌云,2*,苟向锋,2
(1.天津工业大学机械工程学院,天津 300387;2.天津市现代机电装备技术重点实验室,天津 300387)
0 引言
科学技术的发展和医疗水平提高的同时,人均寿命延长,社会老龄群体和运动功能障碍患者数量逐年上升,对辅助运动和运动功能恢复的需求随之增大。除了初期的康复治疗外,后期借助辅助医疗设备进行康复训练具有重大意义。传统的治疗手段是由具有一定经验的康复医师一对一地对患者进行康复训练,该方法治疗效果好,但受康复医师人力所限,治疗成本高,治疗的时间、地点受限,通常不能达到预期效果。为此,国内外医疗机构通常选用医疗机器人代替治疗师进行康复训练,这样不仅降低成本、提高治疗效果,还可以为患者提供安全可靠的治疗方案和手段[1]。传统大型康复器械通常体积大、不可移动、训练模式单一、环境枯燥。可穿戴下肢外骨骼康复机器人是机械、电子、人机交互、仿生学等交叉融合的学科,穿戴于患者肢体上,通过检测穿戴者的运动意图,辅助并保护其进行康复训练的智能化、机械化康复设备。可穿戴下肢外骨骼康复机器人弥补了传统治疗方式的不足,摆脱了悬挂式等大型康复设备的场地局限性,备受社会关注[2]。本文主要介绍可穿戴下肢外骨骼康复机器人的研究状况,论述其关键技术,展望其发展方向。
1 国内外研究现状
1.1 国外研究现状
康复医疗机器人最早始于1890年俄罗斯人Yagn[3]设计的世界第一个增强跑跳能力的下肢外骨骼装置——Assistead-walking Device。1965年,美国通用电气公司与康奈尔大学研制了全身外骨骼试验样机Hardiman[4-5]。20世纪70年代初,南斯拉夫人Vukobratovic[6]系统性地提出了下肢动力外骨骼设计理论与方法,并研制出具有骨盆扭转补偿功能的电动下肢外骨骼样机——Active Anthropomorphic Exoskeletons。
21世纪之前,材料、控制、传感等机器人技术发展缓慢,导致外骨骼技术发展缓慢,其智能化、机械化、自动化程度远不能满足患者康复训练的要求。2000年,美国国防高级研究计划局启动了增强人体机能的外骨骼项目研究[7],其中提出了一种借助于机器外骨骼以提高人的能力的新型机器人概念,对外骨骼机器人的发展起到了推动性作用。可穿戴下肢外骨骼机器人主要针对患者中后期的康复训练,其结构设计遵循人体仿生原则,穿戴方便、体积小、质量轻,可为穿戴者提供保护、支撑、助力等作用;采用自平衡技术或支撑设备,摆脱场地的限制,同时具有多种训练模式以帮助穿戴者进行康复训练。
近年来,机器人技术逐渐成熟,辅助型机器人的研究在康复医疗领域取得了一些成果。可穿戴康复外骨骼机器人已经逐渐代替传统的康复训练器械,并成功推广应用于残疾人或老年人助残助力等康复训练中。目前国外已经有部分可穿戴下肢外骨骼机器人投入市场。
日本Cyberdyne公司研发的可穿戴下肢外骨骼机器人 Hybrid Assistive Leg(HAL)[如图 1(a)所示][8]在2008年市场化,2013年获得全球安全认证并进行批量生产。该机器人主要包括控制器、电池、电动机动力单元、肌电传感器、角度/加速度传感器、地面反作用力传感器等6个部分。HAL自重23 kg,下肢动力装置位于髋关节、膝关节和踝关节,无需辅助支撑,可续航160 min[9]。HAL的独特优势是具有生物意识控制系统和自主控制系统。生物意识控制系统模式根据传感器采集人体运动产生的生物电位信号、下肢关节力矩进行计算,并判断穿戴者的运动意图,控制外骨骼运动;自主控制系统模式利用计算机存储的动作模型完成并记忆助力动作(坐下、站立、行走、上下楼梯等)。HAL配合正常物理治疗对脊髓损伤、全膝关节置换和脑瘫等患者进行康复训练,均可使其步态得到明显的改善[10]。
新西兰Rex Bionics公司研发的可穿戴下肢外骨骼机器人Rex[如图1(b)所示]主要针对下肢松弛和瘫痪的患者设计[11]。该装置质量为39 kg,由10个电动机为外骨骼髋、膝、踝关节提供动力。为确保连续使用,采用充电和可替换电池2种方式供电,续航时间2 h。为配合轮椅使用,在腰间安装操纵杆扶手,穿戴者可在无辅助支撑的情况下保持平稳缓慢移动。Rex采用定制的运动控制系统,由五十万行专用代码控制27个板载微处理器构成,该系统的开发旨在确保整个运动周期的稳定性[12-13]。
以色列ReWalk Robotics(RWLK)公司研发的可穿戴下肢外骨骼机器人ReWalk[如图1(c)所示][14]于2012年底拿到欧盟CE认证,2014年6月通过美国食品药品监督管理局(Food and Drug Administration,FDA)认证,成为第一批医学外骨骼。ReWalk主要针对脊髓损伤患者,其自重20 kg,高度和宽度可调,髋、膝关节采用独立电动机控制,踝关节处采用弹簧辅助被动运动,并在臀部框架上配置可充电电池以及便携式计算机控制系统。该下肢外骨骼通过挂绳和绑带与穿戴者相连,其工作时便携式计算机控制系统根据体感技术和腕部传感技术获得人体信息来判断下肢运动状态,同时对外骨骼机器人的步态和步速做出改进,使其与人体协调运动,帮助穿戴者完成康复训练。其续航时长为160 min[15-16]。
美国Parker Hannifin公司所研发的可穿戴下肢外骨骼机器人Indego[如图1(d)所示][17]由范德比尔特大学的研究人员设计,于2016年获得FDA批准,可帮助下肢受伤、脊髓损伤、多发性硬化或因中风不能行走的患者进行后期恢复。Indego自重12 kg,采用模块化设计,包括1个髋关节模块、2个大腿模块和2个小腿模块,由4个电动机(每个髋关节和膝关节各一个)提供动力,踝关节采用被动结构设计。该下肢外骨骼可在轮椅上穿戴,通过陀螺仪和传感器检测穿戴者平衡状态来控制装置体位变化,使外骨骼跟随人体运动,穿戴者靠前臂拐杖保持平衡,可实现坐、站立、行走等多种模式自由切换,续航时间1 h[18-20]。
美国Ekso Bionics公司研发的可穿戴下肢外骨骼机器人 Ekso GTTM如图 1(e)所示[21]。Ekso GTTM自重23 kg,具有高精度的感应器、微型驱动电动机、拟人关节,配备了速度极快的中央处理器和强大的软件系统。其髋关节和膝关节为主动助力关节,踝关节为弹簧控制的被动关节,可续航24 h[22]。该装置主要针对脊髓损伤、中风恢复等患者,采用传统的传感器和智能支撑拐杖进行动作控制,根据穿戴者的不同需求,可选择康复医师辅助训练模式、穿戴者自主定义模式和自感应肢体运动触发模式。
美国加州SuitX公司于2016年研发出可穿戴下肢外骨骼机器人Phoenix[23]。该外骨骼机器人采用模块化设计,由1个髋关节模块、2个膝关节模块和2个脚模块组成,3种模块可独立或组合进行使用。该装置设计方案极简,质量只有12.25 kg,主要针对脊髓损伤患者设计。外骨骼工作时,电动机驱动髋、膝、踝关节帮助穿戴者进行运动助力,需使用手杖保持平衡,其续航时长为4~8 h[24]。
西班牙马德里Technaid公司在2019年5月推出最新版本的可穿戴下肢外骨骼机器人Exo-H3[如图1(f)所示][25]。该装置是Technaid公司第三个版本的外骨骼机器人,是西班牙国家研究委员会生物工程组多年研究的成果。Exo-H3驱动电动机很小,而且与大多数外骨骼相比,其框架非常灵活,自重14 kg。Exo-H3通过系统存储的步态模式数据驱动外骨骼髋、膝、踝关节运动,可以完全模仿人体行走的过程,且可搭配使用拐杖,帮助下肢行动不便或功能丧失的人进行辅助行走和康复训练。Exo-H3具有Wi-Fi、蓝牙等通信功能,通过使用手机中的App实现控制外骨骼机器人的步行速度、电动机辅助运动、站起和坐下等基本功能。其主要优点是开放式的结构,专为研究而设计,允许更改算法以及应用不同的控制策略,可匹配患者不同的需求[26]。
法国RB3D防务公司研发的可穿戴下肢外骨骼机器人HERCULE、韩国现代公司研发设计的外骨骼机器人HMEX等[27]均在外骨骼机器人领域具有一定影响。此外,国外还有一些知名院校也在可穿戴下肢外骨骼机器人领域有相应的研究[28-32]。
美国哈佛大学在美国国防部资助下开发了一款柔性气压驱动可穿戴下肢外骨骼机器人Soft Exosuit[如图 1(g)所示],该装置质量为 9.12 kg,主驱动关节为髋、膝、踝关节,无需辅助支撑就可以帮助行动不便和瘫痪人士重新站起来,运动续航时间长达45 min[28]。这种柔性外骨骼装置由编织带状纺织物组成,包裹在穿戴者腰部和腿部,从而降低机械阻抗和惯性,具有轻便的特点[29-30]。
荷兰特温特大学研发的可穿戴下肢外骨骼机器人 MindWalker[如图 1(h)所示]质量为 28 kg,由电动机驱动外骨骼髋、膝、踝关节运动,可以使截瘫患者在辅助支撑帮助下以0.8 m/s的速度进行无障碍行走,最大限度地提高舒适性和适应能力[31]。MindWalker拥有一个多控制策略的控制系统,将人体运动时的步态循环进行多“阶段”定义,根据人体运动时前倾和侧倾导致人体重心的变化进行整体步行控制,并可以通过该装置的传感器(编码器、重力传感器和陀螺仪)来检测控制的精确性。
日本藤田保健卫生大学研发了可帮助截瘫患者安全、自然行走的外骨骼机器人Wearable Power Assist Locomotor(WPAL)[如图 1(i)所示],该装置的驱动系统由髋、膝和踝关节的驱动电动机组成,工作时有3种行走模式,穿戴者靠拐杖保持运动平衡,最快步行速度1.3 km/h,最大续航时间为1 h[32]。其与其他外骨骼机器人的差异在于外骨骼内侧设计有滑动轨道,外侧设计可与轮椅连接的人机接口,可以在轮椅上使用。

图1 国外可穿戴下肢外骨骼康复机器人
1.2 国内研究现状
我国在可穿戴下肢外骨骼机器人领域的研究较晚,21世纪初才陆续开始进行。2004年中国科学院合肥智能机械研究所研制出第一代实体样机WPAL,采用电动机驱动,其对人体刚体动力学模型进行修正,对速度-力控制模型进行改进,实现柔顺控制,穿戴舒适,且可减少肌肉疲劳[33]。2006年,海军航空学院研制了能量辅助外骨骼服[34],采用上肢控制下肢原理,通过检测上肢运动信息控制下肢膝关节运动,其他关节巧妙地使用气弹簧来实现负荷支撑,跟踪行走步态。随着我国综合实力的提升,机器人技术逐渐成熟,已经出现了一批专注研究可穿戴下肢外骨骼机器人的公司,并且将所研发的产品投入市场销售。
成都布法罗机器人科技有限公司在2017年研发出第一代产品个人助行可穿戴下肢外骨骼机器人系统 AIDER[如图 2(a)所示],该装置自重 19 kg,通过电动机驱动外骨骼两侧髋、膝关节运动,需使用拐杖辅助支撑下肢截瘫患者保持运动平衡,实现起立坐下、行走跑步、上下楼梯、蹲下起立等动作,起到康复治疗和个人助行的作用[35]。其控制系统可以根据传感器预测运动意图并驱动外骨骼,也可以根据特定步态曲线驱动外骨骼进行康复训练,续航时间5 h。
北京大艾机器人科技有限公司于2018年发布了可穿戴下肢外骨骼机器人Ailegs艾动[如图2(b)所示][36]。Ailegs艾动外骨骼机器人主要针对脊髓损伤、脊髓炎、脑损伤、脑瘫、中风、偏瘫、骨关节术后运动恢复、肌无力等患者设计[37]。该外骨骼机器人由电动机驱动髋、膝关节运动,支持并带动患者下肢运动,需使用拐杖保持平衡,以自然的行走步态、真实的行走方式进行训练,可重塑患者正确行走姿势,锻炼患者平衡运动能力及行走肌肉神经。该装置背部、大腿和小腿长度尺寸调节范围大,调节便利,尺寸精准,适用于更大范围不同身高患者的精确快速适配;且体积小、质量轻、便于携带;其控制系统精细化,提供适应不同病程、不同病种的步态训练,适用不同患者的个性化康复需求。
上海傅利叶智能科技有限公司2017年发布了可穿戴下肢外骨骼机器人Fourier X1,为下肢残疾患者提供有“触觉”的外骨骼机器人训练方式;2019年发布的第二代可穿戴外骨骼产品Fourier X2[如图2(c)所示]可用于辅助行走、康复训练、运动功能强化等多个领域[38]。Fourier X2自重18 kg,具有运动控制系统、动力单元以及力学传感系统。动力单元位于髋、膝关节,由电动机驱动。主运动控制单元为该公司自主研发,为运动轨迹、速度的动态调整与数据采集提供强大算力支持。通过力反馈控制算法,该装置可以根据受力点处力的大小调整动力输出,从而实现被动、主动、助力等模式,必要时需使用拐杖保持系统平衡。
尖叫智能科技(上海)有限公司研发的外骨骼机器人S1、迈步科技有限公司研发的外骨骼机器人BEARH1等均已投入市场销售[39]。此外,在国内还有许多院校团队在可穿戴下肢外骨骼机器人领域有相应的研究[39-45]。
上海交通大学于2015年研发了一种新型混联可穿戴下肢外骨骼机器人[如图2(d)所示][40]。该装置根据人体下肢生理结构,每条腿设计6个自由度,采用电动机和液压混合驱动方式,主驱动关节为髋、踝关节,且并联机构具有更好的承载性能,不需要辅助支撑,能自适应不同身高的穿戴者。该装置采用一种新型模糊自适应PID控制器,实现了步态与动作的智能控制。
香港中文大学于2015年成功研发了可穿戴下肢外骨骼机器人 CUHK-EXO[如图 2(e)所示],该装置自重18 kg,由电动机驱动髋、膝、踝关节运动,需使用拐杖支撑,帮助截瘫等患者恢复站立、坐下和行走的灵活性,续航时间3 h[41]。该外骨骼步态控制系统采用离线设计和在线修改算法,能够生成用于步行辅助的参考路径,同时可以在助行过程中根据轨迹生成算法,对步态数据进行收集和修改[42],能有效地抵消运动障碍,为佩戴者提供稳定的辅助。
哈尔滨工业大学于2016年研发了可穿戴下肢外骨骼机器人HIT-LEX[如图2(f)所示],该下肢外骨骼质量为43 kg,整机具有14个自由度,采用模块化设计,髋关节采用“准拟人化”结构设计[43]。该外骨骼设计了分布式的人机交互传感系统,工作时由电动机驱动髋、膝关节运动,踝关节为被动关节,不需要辅助支撑,能够适应各种复杂路面环境并辅助人体负重行走,续航时间2 h,具有质量轻、包络尺寸紧凑的特点。
浙江大学于2017年研发的可穿戴下肢外骨骼机器人是一种可穿戴液压驱动下肢外骨骼机器人,如图 2(g)所示[44]。该外骨骼自重 5.355 kg,髋、膝关节为主动关节,踝关节为被动关节,辅助患者康复训练时不需要辅助支撑。该外骨骼采用一种有效解决人机交互系统中病态雅可比矩阵问题的方法,保证了末端速度方向一致且避免速度突变;并使用干扰力模糊逼近算法,采用自适应模糊控制提高结构控制性能和控制精度。
东南大学2017年研发了一种半被动节能性质电动机套索驱动可穿戴下肢外骨骼QEPLEX[如图2(h)所示],主要应用于下肢力量不足等患者的助力及康复训练[45]。整机自重12 kg,共16个自由度,主要包括套索传动装置、电动机驱动装置、传感器装置和控制装置。QEPLEX依靠被动双足行走理论和人体下肢运动机理设计,无需辅助支撑,助力关节只有髋关节,具有主动驱动关节少、整机质量轻、被动柔性关节和储能元件多、穿戴舒适、控制系统简洁等优点。
中国科学院深圳先进技术研究所于2019年研发出新型智能可穿戴下肢外骨骼Auto-LEE,与传统外骨骼不同,Auto-LEE具有10个自由度[如图2(i)所示],其主动助力关节——髋、膝、踝关节分别被直流电动机独立驱动,在无辅助支撑的情况下可保持行走平衡[46]。该装置采用模块化结构概念,并考虑了多模态人机交互。为了验证双足步行的自平衡能力,还研究出3种生成步行模式的通用算法,并进行了初步实验。
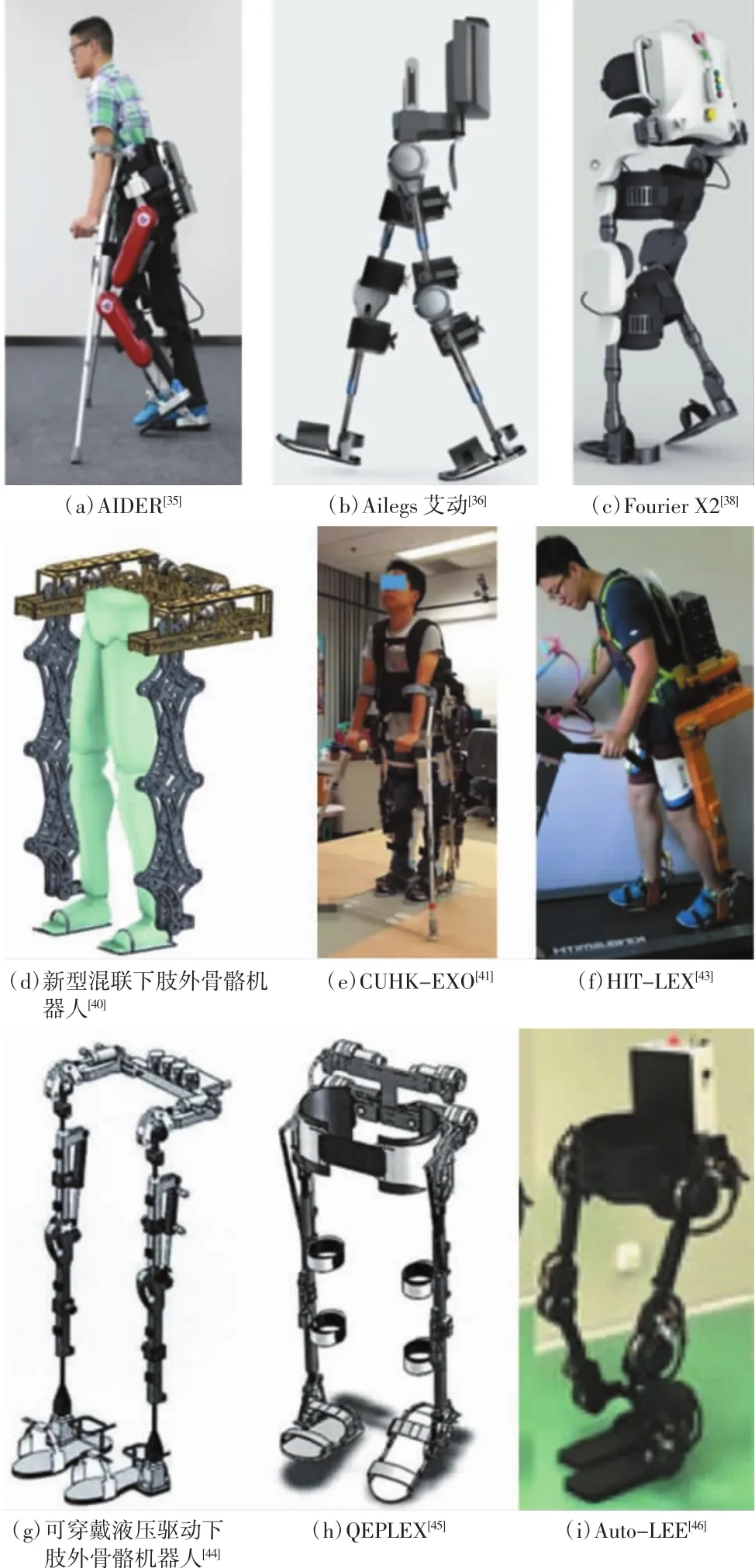
图2 国内可穿戴下肢外骨骼康复机器人
1.3 总结
通过国内外可穿戴下肢外骨骼康复机器人的基本情况对照(见表1)可以看出,可穿戴下肢外骨骼康复机器人正向质量轻量化、续航能力强等方面发展。目前,大多数外骨骼机器人是以电动机为驱动的刚性外骨骼,主要驱动关节为髋、膝、踝关节,采用仿生原理与人的肢体并联,无需外部辅助支撑,可以部分或全部支撑人体质量,辅助人体下肢运动从而实现康复训练。
随着科技的进步,国内外充分将现代先进科技融入到可穿戴下肢外骨骼机器人中,如HAL、Fourier X2等下肢外骨骼可搭配外接设备,使用VR平台、脑电图计算机采集,将脑电信号转化为外骨骼的控制命令;Exo-H3含有Wi-Fi、蓝牙等通信功能,可连接自主研发的App实时对穿戴者的生理信息进行监测分析,并可以主动对外骨骼进行调整,提升康复训练效果。在监测、控制方面,绝大部分外骨骼机器人使用自主研发的控制系统和分析软件。而国内的Fourier X2搭载以软件为中心、模块化硬件的外骨骼机器人生态系统EXOPS开放平台,并配有一套软件开发工具包供相关人员进行二次开发,获取穿戴者实时运动信息并控制动力单元实现步行辅助,这将加快我国在可穿戴下肢外骨骼机器人领域的研发速度。
虽然我国在该领域研发较晚,但是近年来的研究已经取得了一些成果,在结构设计、控制系统、传感系统等方面都已经形成了一套相对完整的研究体系,可以进行独立自主的研发工作。
2 关键技术分析
可穿戴下肢外骨骼康复机器人涉及机器人学、人体工程学、控制理论、传感器技术、信息处理技术等学科,是多种高新科技的集成。外骨骼机器人是一种复杂的高精度机器人,可以为穿戴者提供康复训练、运动助力等功能。通过研究国内外研究成果,其设计生产过程中主要有以下几大关键技术。
2.1 驱动系统
驱动系统作为外骨骼的关键系统之一,为外骨骼提供动力。目前常用的外骨骼驱动方式有电动机、液压、气压3种[47]。电动机驱动分为盘式电动机和电动推杆,盘式电动机具有结构简单、易于拆卸、无污染等优点,但是体积大且笨重;电动推杆驱动是将电动机的转动转化为推杆的直线运动,推动关节转动,其自锁性好。液压驱动具有结构简单、惯性小、可靠性高、功率密度大等优点,但其成本高、噪声大、体积质量大、不便于携带。气压驱动分为气缸驱动和人工肌肉驱动,气缸驱动具有质量、体积小,成本低等特点,但工作不稳定,容易受外界影响;人工肌肉类似气缸,采用拟人化设计,这种聚合物人工肌肉比天然肌肉工作能力大100倍,虽然性能很强,但目前该技术尚未成熟[48]。随着同步电动机、伺服电动机以及减速器的发展,复杂模块简单化,电动机驱动系统的功率质量比也在逐渐提高。因此,外骨骼多采用电动机驱动系统。目前市场中流通的外骨骼均采用电动机驱动装置,如Ekso Bionics外骨骼采用高性能无刷电动机配合行星减速器与蜗轮蜗杆减速器二级减速;ReWalk外骨骼、AIDER外骨骼采用高性能无刷电动机配合行星减速器与正交锥齿轮减速器二级减速;HAL-5、Ailegs艾动外骨骼采用盘式电动机组合谐波减速器一级减速[49]。
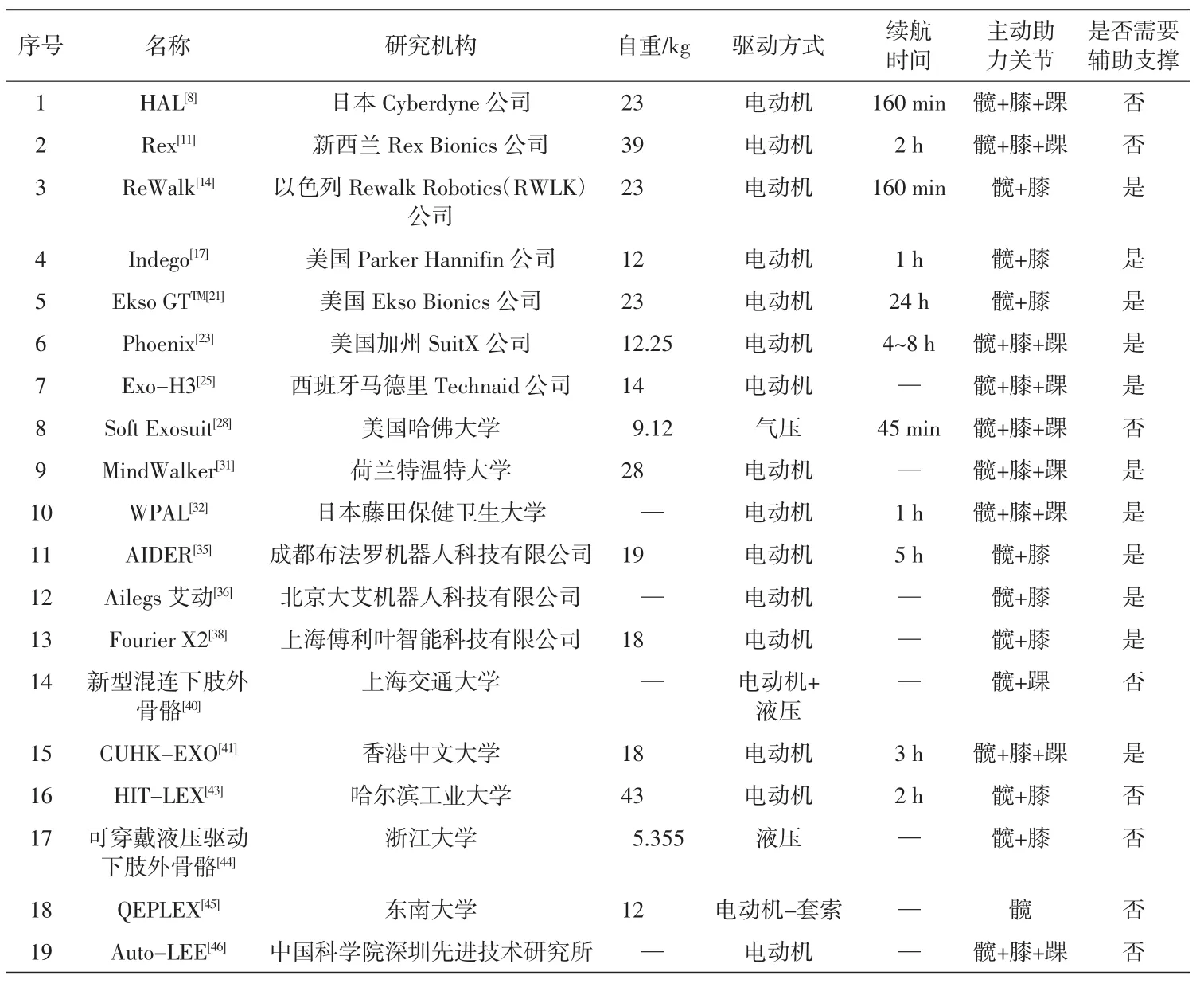
表1 国内外可穿戴下肢外骨骼康复机器人基本情况对照
2.2 感知系统
感知系统包括角度传感器、压力传感器、肌电传感器、编码器、电子罗盘、陀螺仪、加速度计等。目前,已经研发出以手势识别为代表的非接触式的体感技术。为了使外骨骼运动得到更精确、柔顺的运动控制,需要根据外骨骼的训练模式和结构特点,在所需求的位置安装传感器等感知装置收集人体生理和运动信息、外骨骼位置位姿信息、各个关节处的速度和力矩信息等数据,所收集信息数据的正确性将直接影响外骨骼整个系统的稳定性。单一传感器给出测量信息容错率低,一旦信息错误就会使系统判定错误,从而带来安全隐患,因此目前多采用多传感器感知系统对信号进行综合判断,得到更准确可信的步态信息[50]。感知系统一方面用于监测人体位姿,预判运动意图;另一方面可以检测穿戴者康复训练整个过程中的人体生理状态、训练效果,为康复医师提供客观数据。
2.3 控制系统
可穿戴下肢外骨骼机器人的控制系统相当于人的“大脑”,决定外骨骼的功能和主要性能。根据控制系统一体化思想,控制系统分为感知、决策、执行3个方面[51]。感知层面是通过感知系统获得穿戴者运动步态和环境信息。由于康复训练过程中人体运动步态信息和外部环境信息的不确定性,人机交互变得更为复杂,这时就需要通过控制系统进行决策。为实现控制的实时性、准确性,控制系统针对不同的康复训练模式采取相对应的控制策略,并根据人体步态与环境信息的变化,快速、准确地对原本设定好的步态轨迹进行优化处理并发出控制命令。最后由驱动系统执行命令完成精确、柔顺的运动辅助。综上,设计控制系统要把握的原则为对人体生理和运动信息响应迅速、降低行走干涉、降低系统复杂度和成本、简化控制策略、降低人体行走代谢[52]。
2.4 人机匹配技术
可穿戴下肢外骨骼机器人是与穿戴者接触的人机一体化装备,其机构、驱动器、传感器和自由度分配都要合理设计才能与人体匹配,避免人机干涉,在保证外骨骼机器人穿戴安全性、舒适性的前提下使装置有效地进行康复训练[51,53]。可穿戴外骨骼机器人机构的自由度直接影响人机匹配运动,自由度过低将导致肢体达不到正常运动角度,造成穿戴不舒适;自由度过高产生冗余,可能造成肢体位置不可控,达不到康复训练要求且不能保证穿戴者的安全。驱动系统的位置和结构设计也要符合人体运动机制,在保证运动正确性的同时,最大化地模拟人体肌肉运动特性。外骨骼机器人的结构应满足在保证自身刚度强的前提下尽可能轻量化,在支撑人体质量、减少人体关节支撑受力的情况下不影响人体正常运动和康复训练。装备尺寸应可以快速调节,能够满足不同身高、体质量的穿戴者快速穿卸的需求。可穿戴外骨骼是复杂的人机交互系统,人体在系统回路中的安全性很重要,外骨骼与人体接触部位应选用对人体无害且舒适的材料,在适当的位置添加弹性缓冲装置,设置关节活动限位装置,保证穿戴者的绝对安全,避免二次伤害。
2.5 人机交互技术
人机交互技术是为了保证外骨骼和穿戴者的运动保持协调一致性。交互方法有物理型和感知型,物理型人机交互法通过力学、运动学等信息感知穿戴者和外骨骼之间的交互,感知型人机交互法通过人体肌肉、脑部信号等识别实现人机交互[39]。随着传感技术和人工智能技术的发展,人机交互技术逐渐变得更人性化、智能化。交互方式也开始向更高级的方式发展,可通过语言、手势等进行交互,还可以通过人体生物信号,如皮肤电信号、脑电信号等进行交互。在数据传输上,也可以使用更加高级的全浸入式图形化环境、三维全息环境建模进行多方位的高效数据传输。这种交互方式的建立,可保证外骨骼与人体运动契合度,以及运动的准确性、安全性。一方面可以使外骨骼做出更准确、快速的动作,提高穿戴者的舒适性;另一方面康复医师可以通过数据对穿戴者的情况进行分析,快速施加康复训练指令,达到理想的康复训练效果。
2.6 电池及管理技术
可穿戴下肢外骨骼康复机器人的能源应具有质量轻、容量大、续航时间长、便携、环保等特点。外骨骼机器人的能源-驱动系统一般分为2种:一种为燃料-发动机-液压缸驱动,另一种是电池-电动机驱动。电池-电动机方案凭借其低噪声、小振动、小发热量、结构简单和良好的可控性能等优点在国内外众多的外骨骼设计中得到广泛的应用。当前,电驱动外骨骼机器人一般依靠可充电锂电池、蓄电池、燃料电池来为能源动力系统提供能量来源。
由于电池受体积和质量等因素限制,存在能量密度、功率密度低等缺点[54]。因此,为使外骨骼机器人的工作时间更长、工作更加稳定,一方面需要研究常规电池或燃料电池的特性,设计续航时间长、质量功率比高、安全性能符合要求的专用动力输出能源,为动力、信号采集和控制机构提供能源;另一方面需要综合考虑低功耗技术、节能控制技术和能源回收技术等[55]。
3 展望
我国在可穿戴下肢外骨骼康复机器人领域已经取得了一些突破和进展,现有的康复医疗机器人技术也在不断地完善,为了能更好地进行康复训练,在今后的发展中应侧重以下几点。
3.1 外骨骼结构模块化
模块化理论研究可以概括为复杂产品模块化设计、复杂系统模块化设计和产业组织的模块化建设。目前的外骨骼机器人大多采用整体式的设计。将外骨骼机器人按照一定的规则进行模块划分,使每个模块功能独立且具有针对性,降低外骨骼机器人的复杂性,在科研方面更容易突破。而且模块化设计不仅可以使外骨骼机器人结构简单、精度高、性能稳定、成本降低,在使用和维修上也具有一定的优势,可以更好地满足不同用户的实际需求。
3.2 控制系统智能化
科技发展迅速,5G时代的到来促使人工智能技术深度发展。外骨骼机器人控制系统应与时俱进,使机器人可以自主学习,实现智能控制,使操作简单容易,增强用户体验,实现更加舒适的、人性化的康复训练。
3.3 康复训练效果评价能力
目前,外骨骼机器人大多数基于人体工程学设计,能够顺利地完成人机协调运动,但康复训练过程中,其助力能力、助力效果、骨骼稳定性、新陈代谢值、穿戴者疲劳程度等不能在训练时进行监测并呈现,且每一次康复训练结束后不能直接检测并呈现出康复训练的医疗效果。因此,外骨骼的康复效果评价系统对康复训练具有很大作用。
4 结语
随着机器人技术的不断成熟,我国在可穿戴下肢外骨骼康复机器人领域得到了多方位的发展,并取得一定成果,但与外国的可穿戴下肢外骨骼机器人相比还存在一定的差距,尤其是在智能控制和康复效果评价方面。为了更好地实现康复训练,我国在可穿戴下肢外骨骼康复机器人领域的研发上应注重结构模块化设计,采用更高级的人工智能控制系统,并建立完善的康复效果评价系统。随着可穿戴下肢外骨骼康复机器人功能完善、性能和可靠性的提高,康复医疗效果会更好,未来将会在康复医疗领域普遍使用。