基于两自由度压电驱动快反镜的星光跟踪控制
2019-12-17姜世平
姜 世 平
(江苏大学 土木工程与力学学院,江苏 镇江 212013)
0 引言
天文望远镜星光观测系统极易受到环境中各种动态干扰的影响,如环境温度变化、大气湍流及各种原因引起的机械振动,都会不同程度地影响系统性能,甚至导致系统无法正常工作[1]。研究人员建立了天文望远镜的伺服控制系统用于跟踪“移动缓慢”的恒星。但是,由于天文望远镜质量较重导致系统带宽很低,无法用于抑制变换较快的各种动态扰动。因此,光束指向跟踪控制技术成为光学成像领域的研究热点。
快反镜由于可实时地补偿光束指向偏差且具有高精度高带宽特性,受到了研究人员的极大关注。其可被用于修正大气湍流和机械振动导致的光束指向产生的动态偏差[2]。按照驱动方式的不同,快反镜可分为音圈电机驱动式[3-4]和压电驱动式[5-6]。其中,由于压电执行器具有体积小,能量密度高,频响快及定位精度高等优点,故近年来采用压电驱动快反镜实现光束指向跟踪控制的研究与应用发展较迅速。但是,由于压电执行器固有的迟滞非线性导致系统控制精度下降,限制了其进一步发展。研究线性补偿控制抑制迟滞对控制系统性能影响的方法被普遍采用[6-11]。
因此,为了提高天文望远镜跟踪星光的能力,本文拟建立基于两自由度压电驱动快反镜的星光跟踪控制系统,提出前馈补偿和反馈校正相结合的控制测量,减小各种动态干扰对天文望远镜观测性能的影响。
1 压电驱动快反镜星光跟踪控制系统
本文建立的压电驱动快反镜星光跟踪控制系统组成图和实物图如图1所示。图中θ为快反镜实际输出角度。由图可知,跟踪控制系统主要由天文望远镜、两轴压电驱动快反镜、电荷耦合(CCD)摄像头(VS4-1845HS)、功率放大器(E-503.00S,3通道,峰值功率为14 W,输出电压为-30~130 V)、控制器(DSP 28335)组成。其原理为:天文望远镜在观测星光时受到了大气、环境振动等动态扰动导致光束指向不稳,CCD摄像头成像模糊。控制器通过CCD摄像头获得指向误差信号按预定控制规律驱动快反镜修正光束指向,提高成像清晰度。
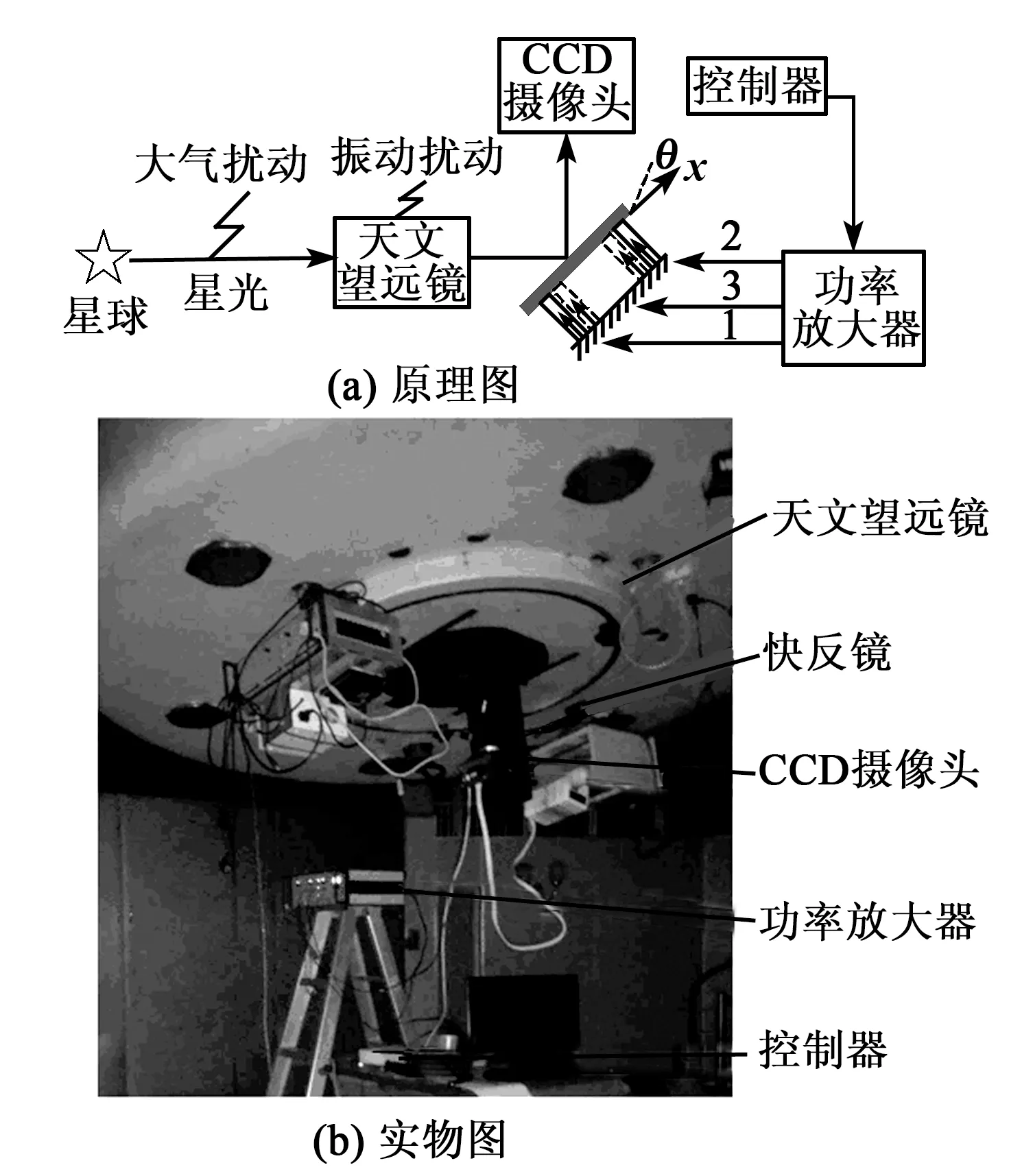
图1 压电驱动快反镜星光跟踪控制系统
2 压电驱动快反镜建模
压电驱动快反镜的三维外观如图2(a)所示,机械和电路组成原理如图2(b)所示。图中uc为压电执行器控制电压,umax为最大驱动电压。在驱动电压的作用下,4个压电执行器产生输出力和位移迫使柔性铰链带动反射镜产生两轴的转动。其动力学模型如图3所示,因此,θx轴的动力学方程为

(1)
其中
(2)
(3)
(4)
(5)
(6)
Fi=(FLi+FHi)
(7)
FLi=d33EAui
(8)
(9)
(10)

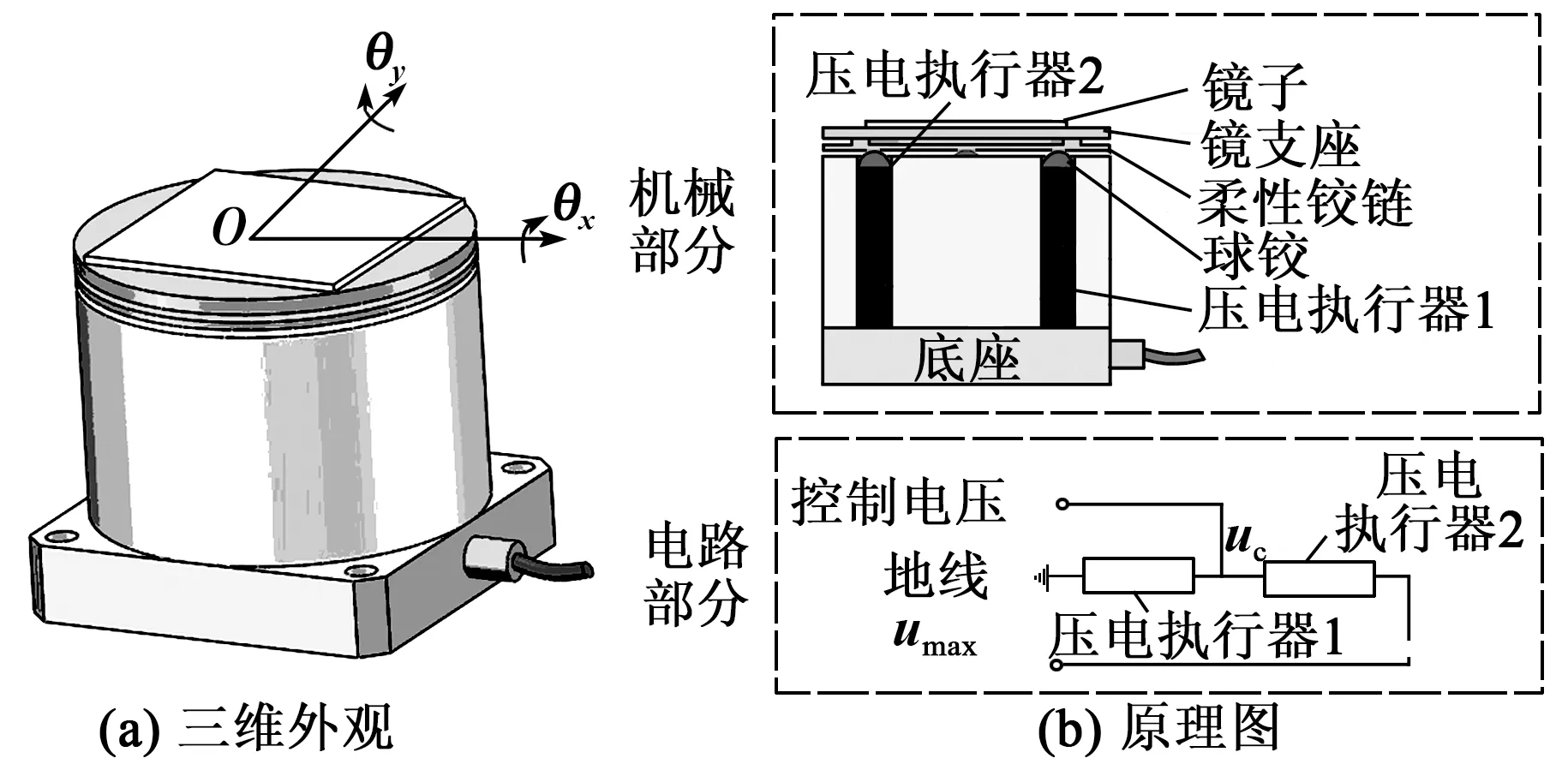
图2 压电驱动快反镜原理

图3 压电驱动快反镜沿θx方向的动力学模型
3 复合控制系统
压电执行器的迟滞非线性极大地降低了压电驱动快反镜的定位精度。为了提高定位精度且降低定位控制算法的复杂度,需对压电执行器进行前馈补偿控制,使其输入、输出关系可近似为线性关系[7]。为提高天文望远镜的成像精度,建立比例积分微分(PID)反馈控制抑制线性化误差和外界扰动。根据上述分析,建立的复合控制系统原理框图如图4所示。图中,θr为期望角度,e为误差,uff为前馈补偿电压,u为PID控制电压。

图4 复合控制系统原理框图
4 实验结果与分析
采用无控制系统和建立的星光跟踪控制系统分别显示了光束在CCD镜头上的指向偏移量,如图5所示。由图可知,与无控制系统相比,采用星光跟踪控制系统可降低最大光束指向偏差78.3%。控制系统能大幅降低光束指向偏差。因此,本文建立的星光跟踪系统能够有效地提高天文望远镜的抗干扰能力及成像清晰度。

图5 控制结果
5 结束语
本文为了抑制各种动态干扰对天文望远镜星光观测系统成像质量的影响,建立了基于两自由度压电驱动快反镜的星光跟踪控制系统。控制系统采用由前馈线性化控制和PID反馈控制组成复合控制方法。为验证该控制系统的有效性,建立了相应的实验系统。实验结果表明,基于两自由度压电驱动快反镜的星光跟踪控制系统使天文望远镜的最大跟踪误差降低了78.3%,能够有效地改善天文望远镜的成像质量。