基于工况的双电机参数匹配与控制策略研究
2019-12-17杨啟梁聂金泉姜敬发
伍 娇,杨啟梁,聂金泉,刘 俊,姜敬发
(1.武汉科技大学 汽车与交通工程学院, 武汉 430081;2.湖北文理学院 汽车与交通工程学院, 湖北 襄阳 441053;3.东风襄阳旅行车有限公司, 湖北 襄阳 441000)
电动城市客车因其节能环保的优势,应用越来越广泛[1-2]。目前商业化的电动客车主要采用单电机驱动,在大多数工况下电机的工作负荷率较低,高效区利用不足。双电机驱动系统常用两个功率较小的电机来代替单电机,可以通过不同的控制策略实现多种驱动模式[3],扩大了电机在高效区的工作范围,整车的动力性与经济性都能得到一定程度的提高[4]。
目前,双电机驱动系统通常采用行星齿轮作为耦合机构[5-7],有单电机驱动、转矩耦合驱动、转速耦合驱动多种驱动模式,需要采用基于瞬时优化的控制策略[8-9]。不同模式之间进行切换可能会因为输出转矩的突变从而导致整车产生较大的纵向冲击[10]。
本文在某款单电机直驱纯电动客车基础上进行改进,设计同轴双电机驱动系统,省去耦合机构,开发基于规则的控制策略。
1 同轴双电机系统结构原理
如图1所示,同轴双电机系统由IM1、IM2两个电机构成,共用同一个转子轴,集成在同一壳体内。电机的输出轴直接与主减速器相连。双电机系统共有3种工作模式:电机IM1单独驱动;电机IM2单独驱动;双电机转矩耦合驱动。转矩耦合驱动模式下,两个电机转速相同,系统的输出转矩为两个电机的输出转矩之和。

图1 同轴双电机系统结构原理图
2 同轴双电机系统参数匹配
2.1 原车及电机参数
双电机系统参数匹配首先需要根据车辆动力性指标进行整车功率计算,然后对常用工况进行数理统计,划分双电机的功能,确定双电机参数。本文基于已有的纯电动客车进行改进,整车基本参数以及相关动力性指标如表1、表2所示。
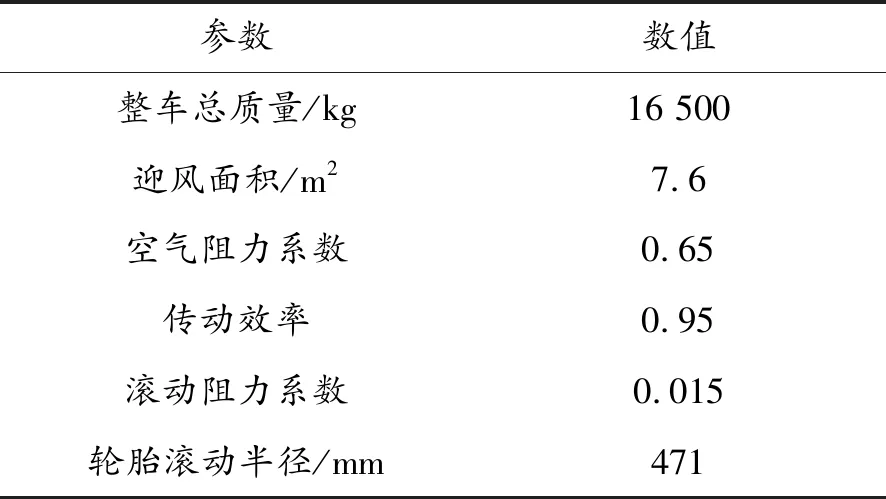
表1 整车基本参数

表2 整车动力性指标
原车采用单电机直接驱动,主减速器传动比为6.17。根据整车动力性指标,匹配的电机参数如表3所示。
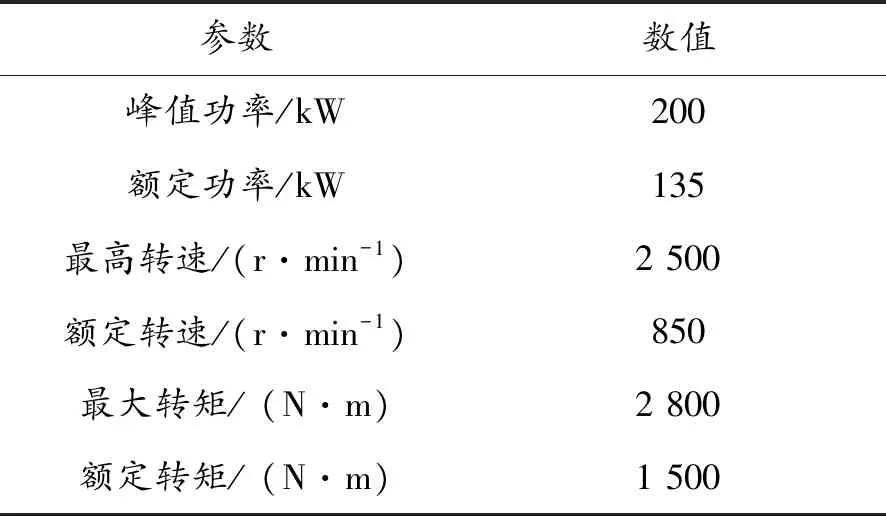
表3 原车电机基本参数
2.2 整车参数计算
整车峰值功率应同时满足整车以最高车速行驶的功率需求、以最大爬坡度行驶的功率需求和加速行驶的功率需求。
Pmax≥max(Pmax_v,Pmax_i,Pmax_a)
(1)
式中:Pmax为整车峰值功率;Pmax_v为整车以最高车速行驶的功率;Pmax_i为整车以最大爬坡度行驶的功率;Pmax_a为整车加速行驶的功率。
1) 以最高车速行驶的功率
(2)
式中:vmax为最高车速;η为传动效率;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积。
代入计算得Pmax_v=71.4 kW。
2) 以最大爬坡度行驶的功率
(3)
式中:vi为爬坡速度;α为最大爬坡度。
代入计算得Pmax_i=101.6 kW。
3) 加速行驶的功率

(4)
式中:va为加速工况下的车速;δ为旋转质量换算系数。
代入计算得Pmax_a=115.8 kW。
因此,Pmax≥115.8 kW。考虑留有一定的后备功率(约20%),选取Pmax=140 kW。
整车最大转矩应同时满足以最大爬坡度行驶的转矩需求和加速行驶的转矩需求。
Tmax≥max(Tmax_i,Tmax_a)
(5)
式中:Tmax为整车最大转矩;Tmax_i为整车以最大爬坡度行驶的转矩;Tmax_a为整车加速行驶的转矩。
1) 以最大爬坡度行驶的转矩
(6)
式中:r为轮胎滚动半径;i0为主减速器传动比。
与原车型单电机相比,双电机系统中单个电机的转矩、功率较小,因此可以采用相对较高的转速,这样有利于减小电机的尺寸和质量。综合考虑市场上齿轮减速器的现状和驱动电机的性能参数,采用中转速(5 000 r/min左右)的驱动电机。主减速器传动比应满足最高车速的要求,即
(7)
式中nM为电机的最高转速。
代入计算得i0≤12.87。为了降低对电机的转矩要求,主减速器传动比应在允许范围内选取较大值。本文采用双级主减速器,根据原车型主减速器传动比为6.17,选取i0为12.33。
代入式(6)计算得Tmax_i=1 394 N·m。
2) 加速行驶的转矩
(8)
代入计算得Tmax_a=1 158 N·m。因此,Tmax≥1 394 N·m,选取Tmax=1 500 N·m。
整车驱动系统的最高转速根据最高设计车速来确定。
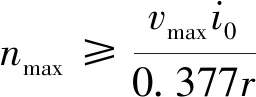
(9)
式中nmax为整车驱动系统的最高转速。
代入计算得nmax=4 800 r/min。
2.3 双电机参数匹配
双电机参数匹配主要是根据整车参数计算结果,确定电机IM1和电机IM2的性能参数。两个电机的耦合性能参数应不小于计算得出的整车参数。
双电机耦合驱动的最大功率应满足整车的最大功率需求,即
Pmax≤Pmax_1+Pmax_2
(10)
式中:Pmax_1为电机IM1的最大功率;Pmax_2为电机IM2的最大功率。
双电机耦合驱动的最大转矩应满足整车的最大转矩需求,即
Tmax≤Tmax_1+Tmax_2
(11)
式中:Tmax_1为电机IM1的最大转矩;Tmax_2为电机IM2的最大转矩。
电机IM1和电机IM2的最高转速均应满足整车对电机最高转速的要求,即
nmax_2≥nmax_1≥nmax
(12)
式中:nmax_1为电机IM1的最高转速;nmax_2为电机IM2的最高转速。
为了提高双电机系统的效率,在满足上述参数要求的条件下,需要对双电机的功率、转矩和转速进行合理划分,使双电机单独驱动以及耦合驱动的工作区域合理分布,尽量提高两个电机的高效区利用率。
电机高效区的利用率与电机的高频工作区域密切相关,而高频工作区域与车辆的行驶工况直接相关。因此,需要对常用行驶工况的电机工作点和车速频次进行数理统计分析,最终得到电机工作频次较高的区域,据此对双电机的参数进行划分。
本文针对纯电动城市客车进行双电机参数匹配和控制策略开发,因此,选取中国典型城市公交循环工况(CCBC)进行数理统计[11]。中国典型城市公交循环工况的最高车速为60 km/h,平均车速较低,车速小于30 km/h的时间达80%,因此将车速区间分为两部分,分析结果如表4所示。
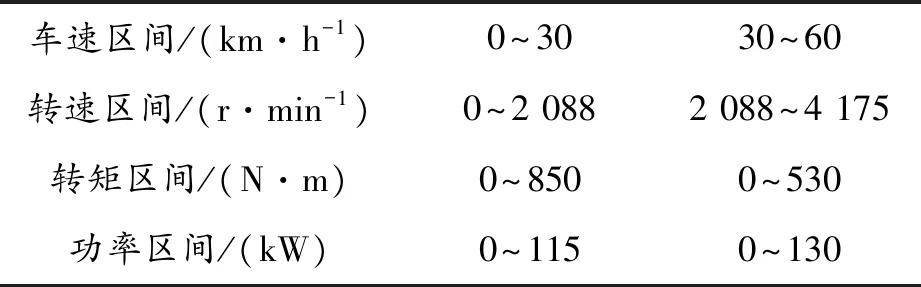
表4 城市公交循环工况分析数据
具有行星齿轮机构的双电机系统,既能实现转矩耦合驱动,又能实现转速耦合驱动,因此在双电机参数匹配时,通常将功率作为主要参数进行划分。
然而,同轴双电机系统由于没有行星齿轮机构,无转速耦合驱动模式,只有电机单独驱动模式和转矩耦合驱动模式。因此,为了简化控制策略,实现工程应用,在匹配两个电机的参数时,需要采取不同的方法。本文针对城市公交循环工况平均车速较低的特点,将转速和转矩作为主要参数进行划分。其中一个电机用于低速大转矩工况,另一个电机用于高速小转矩工况。
电机的高效区一般位于额定转速和额定转矩相交区域附近,因此两个电机的额定转速、额定转矩需要根据上述车速区间进行匹配,尽量使驱动电机的额定转速与车辆的高频车速相一致,以提高电机效率。
电机的额定功率、额定转速和额定转矩满足功率-转速-转矩关系公式,即
(13)
式中:PN为电机额定功率;nN为电机额定转速;TN为电机额定转矩。
根据以上原则进行匹配,得到两个驱动电机的参数,如表5所示。
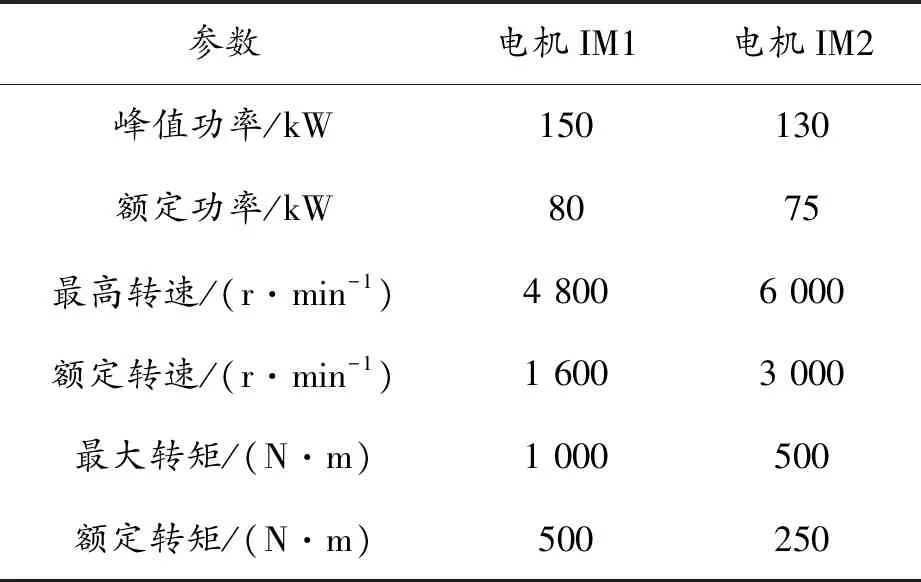
表5 双电机参数
图2、3分别为电机IM1和电机IM2的效率图。如图2所示,电机IM1的高效区集中在转速为600~2 600 r/min范围内的中低速区域,大约在转速1 600 r/min、转矩500 N·m的工作点效率最高,与其额定转速、额定转矩一致。

图2 电机IM1的MAP图
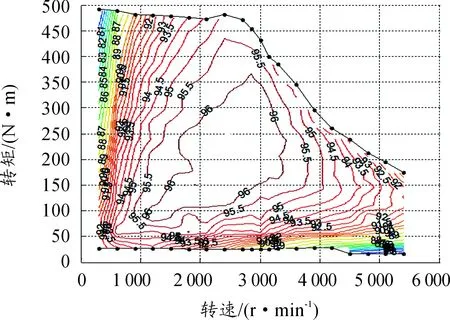
图3 电机IM2的MAP图
如图3所示,电机IM2的高效区集中在转速为1 600~3 600 r/min范围内的中高速区域,大约在转速2 800 r/min、转矩250 N·m的工作点效率最高,与其额定转速、额定转矩基本一致。
3 双电机系统控制策略
本文的双电机系统根据车辆的行驶工况分为电机IM1单独驱动、电机IM2单独驱动和双电机耦合驱动3种工作模式。控制策略主要包括需求转矩计算、模式识别切换和需求转矩分配3部分。电机IM1的高效区集中在中低速区域(600~2 600 r/min),电机IM2的高效区集中在中高速区域(1 600~3 600 r/min)。电机转速<1 600 r/min时,电机IM1效率更高;电机转速大于2 600 r/min时,电机IM2效率更高;电机转速介于1 600~2 600 r/min之间时,电机IM1和IM2效率均比较高。为了提高双电机系统的整体效率,应优先考虑使用效率更高的电机。因此,本文根据电机当前转速npre划分3个区间,基于高效率电机优先的原则选择工作模式,分配输出转矩。当电机当前转速npre小于1 600 r/min时,电机IM1作为主驱动电机优先工作,IM1输出转矩不能满足需求转矩要求时,IM2辅助工作。当电机当前转速npre>2 600 r/min时,电机IM2作为主驱动电机优先工作,IM2输出转矩不能满足需求转矩要求时,IM1辅助工作。当电机当前转速npre介于1 600~2 600 r/min之间时,根据需求转矩分配电机IM1和IM2的输出转矩。考虑到整车在1 600~2 600 r/min的中速区间的需求转矩较小,因此,电机IM2优先工作。当电机IM2输出转矩不能满足需求转矩要求时,IM2以最大转矩工作,电机IM1辅助工作,从而尽可能保证电机IM1和IM2工作在高效区。
1)npre≤1 600 r/min
① 若整车需求转矩Treq小于或等于电机IM1在当前转速下的最大转矩Tpre_1,双电机系统的工作模式为电机IM1单独驱动。电机IM1的输出转矩Topt_1为整车需求转矩Treq,电机IM2的输出转矩Topt_2为0,即若Treq≤Tpre_1,则Topt_1=Treq,Topt_2=0。
② 若整车需求转矩Treq大于电机IM1在当前转速下的最大转矩Tpre_1,双电机系统的工作模式为转矩耦合驱动。电机IM1的输出转矩Topt_1为当前转速下的最大转矩Tpre_1,电机IM2的输出转矩Topt_2为整车需求转矩Treq与电机IM1输出转矩Topt_1之差,即若Treq>Tpre_1,则Topt_1=Tpre_1,Topt_2=Treq-Topt_1。
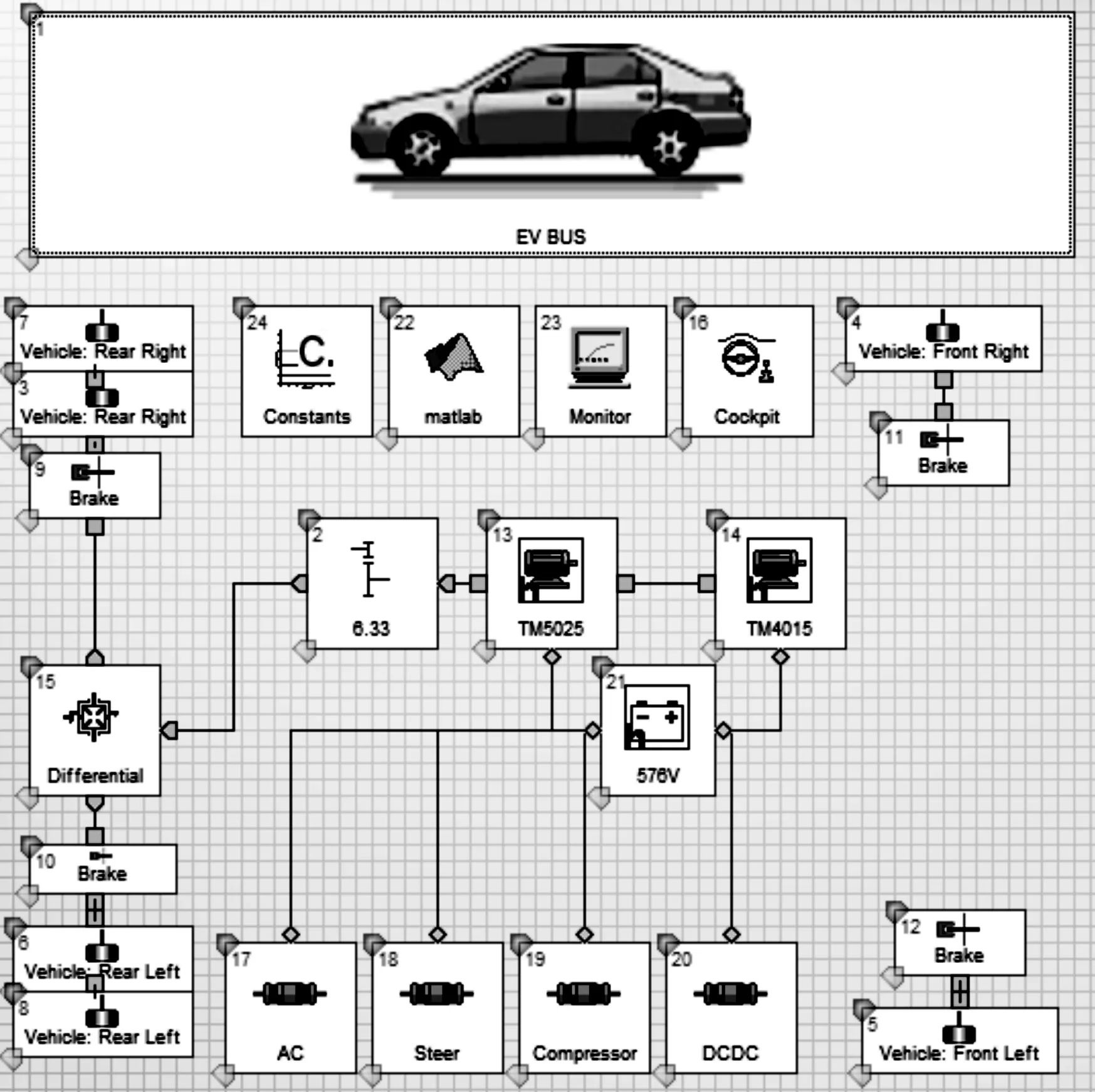
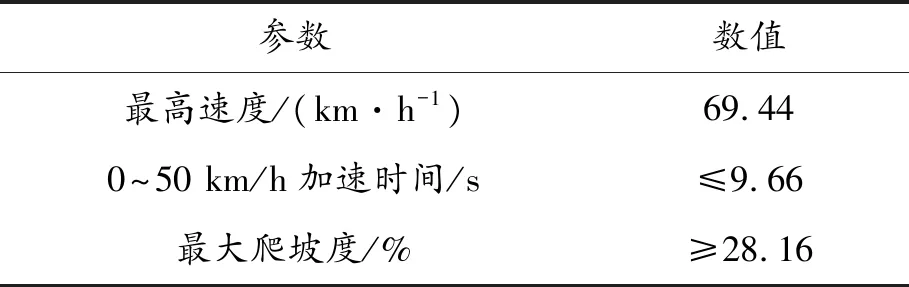
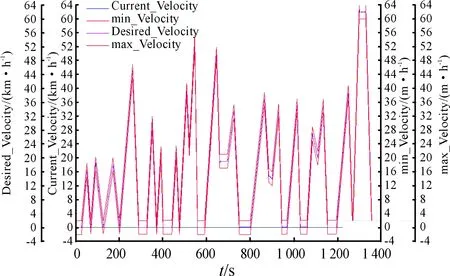
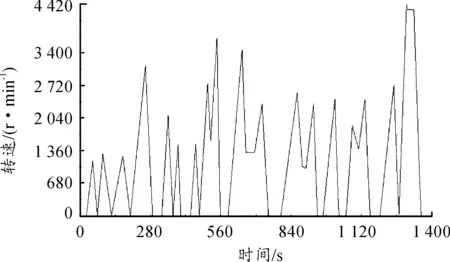
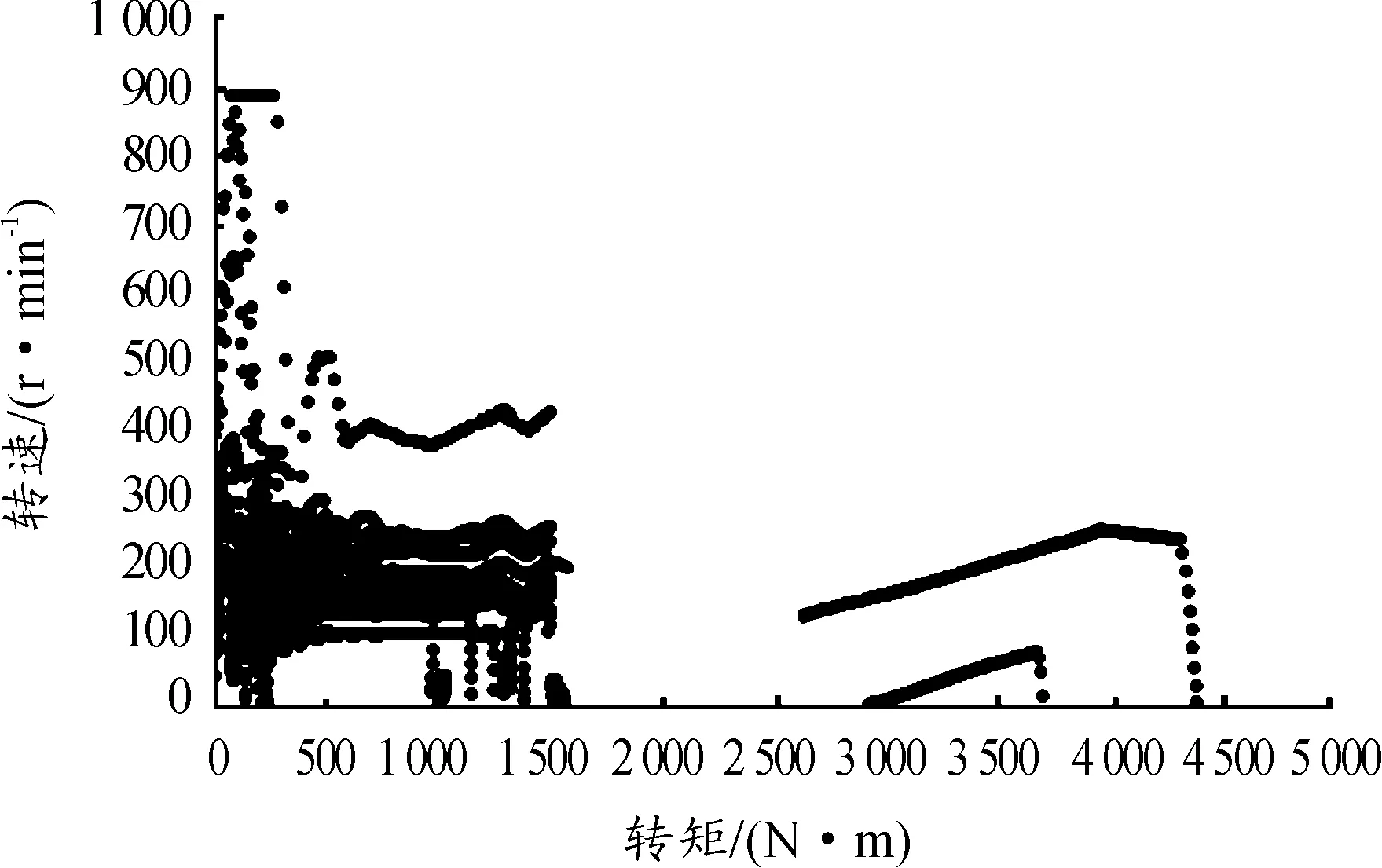
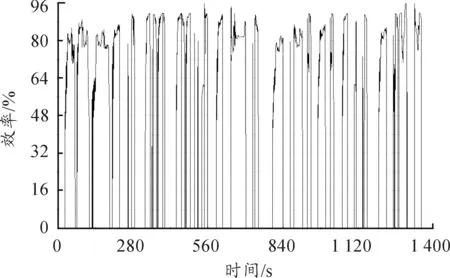
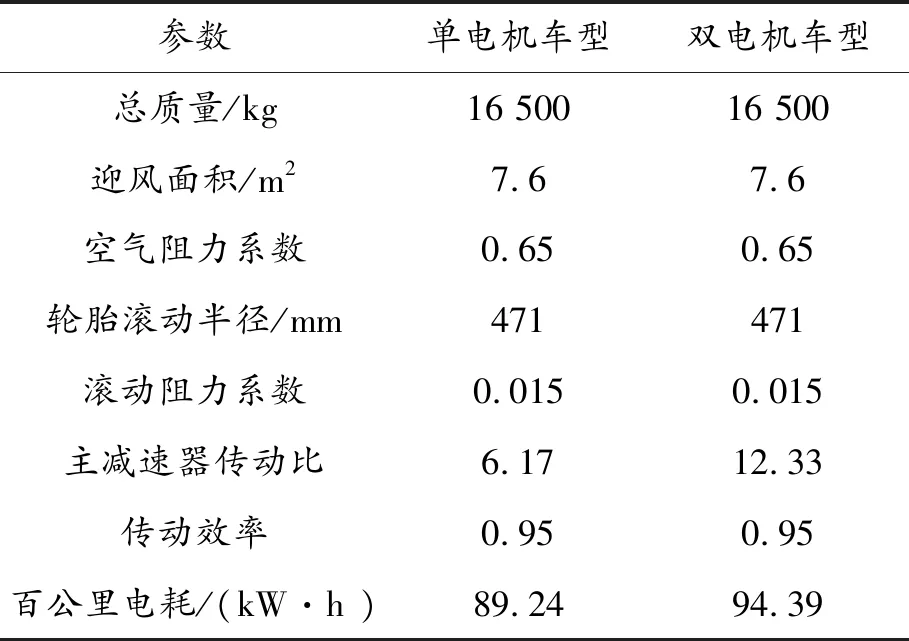
2) 1 600 r/min ① 若整车需求转矩Treq小于或等于电机IM2在当前转速下的最大转矩Tpre_2,双电机系统的工作模式为电机IM2单独驱动。电机IM2的输出转矩Topt_2为整车需求转矩Treq,电机IM1的输出转矩Topt_1为0,即若Treq≤Tpre_2,则Topt_2=Treq,Topt_1=0。 ② 若整车需求转矩Treq大于电机IM2在当前转速下的最大转矩Tpre_2,且小于或等于电机IM2在当前转速下的最大转矩Tpre_2与电机IM1的额定转矩TN_1之和时,双电机系统的工作模式为转矩耦合驱动。电机IM1的输出转矩Topt_1为额定转矩TN_1,电机IM2的输出转矩Topt_2为整车需求转矩Treq与电机IM1的输出转矩Topt_1之差,即若Tpre_2 ③ 若整车需求转矩Treq大于电机IM2在当前转速下的最大转矩Tpre_2与电机IM1的额定转矩TN_1之和时,双电机系统的工作模式为转矩耦合驱动。电机IM2的输出转矩Topt_2为当前转速下的最大转矩Tpre_2,电机IM1的输出转矩Topt_1为整车需求转矩Treq与电机IM2输出转矩Topt_2之差,即若Treq>Tpre_2+TN_1,则Topt_2=Tpre_2,Topt_1=Treq-Topt_2。 3)npre≥2 600 r/min ① 若整车需求转矩Treq小于或等于电机IM2在当前转速下的最大转矩Tpre_2,双电机系统的工作模式为电机IM2单独驱动。电机IM2的输出转矩Topt_2为整车需求转矩Treq,电机IM1的输出转矩Topt_1为0,即若Treq≤Tpre_2,则Topt_2=Treq,Topt_1=0。 ② 若整车需求转矩Treq大于电机IM2在当前转速下的最大转矩Tpre_2,双电机系统的工作模式为转矩耦合驱动。电机IM2的输出转矩Topt_2为当前转速下的最大转矩Tpre_2,电机IM1的输出转矩Topt_1为整车需求转矩Treq与电机IM2输出转矩Topt_2之差,即若Treq>Tpre_2,则Topt_2=Tpre_2,Topt_1=Treq-Topt_2。 利用AVL Cruise仿真软件建立改进后的同轴双电机纯电动客车整车模型,如图4所示。 图4 纯电动客车整车模型 利用Matlab/Simulink仿真软件建立双电机系统控制策略仿真模型。控制策略模型的输入部分是从Cruise软件仿真平台采集的车辆状态信号,包括电池SOC当前值、负载信号、车速信号、制动压力、电机转速等;信号处理部分包括需求转矩计算模块和模式识别转换模块;输出部分包括电机IM1与电机IM2的开关、负荷率、工作模式和残余制动压力,这些信号用于Cruise模型中电机模块或其他模块的信号连接。 整车控制器通过对传动轴转速以及驾驶员需求转矩的识别判断出车辆目前行驶的速度以及负载状态,通过转速以及负载状态确定双电机系统的工作模式。 整车仿真主要针对纯电动客车的动力性和经济性进行仿真,目的在于对双电机系统参数匹配以及控制策略的合理性进行验证。针对动力性仿真,设置了爬坡性能分析任务(climbing perfor-mance)、全负荷加速工况任务(full load acceleration)以及匀速行驶工况任务(constant drive),分析纯电动客车的爬坡性能、加速能力以及最高车速。针对经济性仿真,根据本文研究的控制策略设置基于中国典型城市公交工况(CCBC)的循环工况(cycle run)任务仿真,并将仿真得出的百公里耗电量与原单电机车型进行对比分析。 4.3.1动力性仿真分析 最高车速、最大爬坡度、0~50 km/h加速时间的仿真结果如表6所示,3项指标均达到了设计要求。纯电动客车在满载情况下最大爬坡度达到了28.16%,超过了大于或等于20%的设计指标,完全满足客车的爬坡性能要求。0~50 km/h加速时间仅为9.66 s,远小于20 s的设计要求,加速时间短,车辆具有良好的起步加速能力。最高速度为69 km/h,主要是因为电机IM1的最高转速限制。实际行驶过程中,电机IM2可以单独驱动车辆以更高的车速行驶。 表6 整车动力性仿真结果 参数数值最高速度/(km·h-1)69.440~50 km/h加速时间/s≤9.66最大爬坡度/%≥28.16 4.3.2经济性仿真分析 本文采用基于中国典型城市公交循环工况(CCBC工况)的能耗作为客车的经济性评价指标。如图5所示,客车的当前车速保持在所运行工况的车速限值之内,基本与所需车速相重合,满足所运行的CCBC循环工况车速要求。 图5 循环工况仿真结果 CCBC循环工况运行过程中,电机IM1和电机IM2的转速与输出转矩分别如图6~8所示。 与电机IM2相比,电机IM1的工作频次更高,工作时间更长。该结果符合CCBC循环工况的车速区间分析数据,因为CCBC工况车速小于30 km/h的时间达80%。电机IM1在转速小于或等于1 600 r/min时有转矩输出,输出转矩最高达到880 N·m,超过600 N·m的时间段共有6次,均处于起步加速阶段。由于电机IM1的输出转矩未超过其最大转矩,因此,电机IM2在转速小于或等于1 600 r/min时无转矩输出。电机IM2在转速大于1 600 r/min时有转矩输出,输出转矩最高达到290 N·m。当转速介于1 600~2 600 r/min之间时,电机IM2输出转矩未超过其最大转矩,因此电机IM1在1 600~2 600 r/min的转速区间内无转矩输出。当转速介于2 600~4 500 r/min之间时,整车需求转矩超过电机IM2的最大输出转矩,电机IM1有转矩输出。仿真结果与控制策略中的转速区间划分和转矩分配一致。 图6 电机IM1与IM2转速 图7 电机IM1输出转矩 图8 电机IM2输出转矩 图9、图10分别是电机IM1和电机IM2的工作点分布。如图9所示,电机IM1的工作点主要分布在转速0~1 600 r/min、转矩100~400 N·m的范围内,结合电机IM1的MAP图2可知,电机工作点位于效率较高的区域。如图10所示,电机IM2的工作点主要分布在转速1 600~3 600 r/min、转矩150~300 N·m的范围内,即位于电机的额定转速、额定转矩附近,电机工作点的负荷率较高。结合电机IM2的MAP图3可知,电机工作点位于高效区。 图9 电机IM1工作点 图10 电机IM2工作点 图11、图12更直观地给出了电机IM1和电机IM2的工作效率。如图11所示,电机IM1工作效率90%以上的工况点占比接近50%,效率80%以上的工况点占比超过95%。与电机IM1相比,电机IM2负荷率更高,绝大多数情况下工作在高效区,因此工作效率高,如图12所示。电机IM2工作效率90%以上的工况点占比超过80%。 图11 电机IM1工作效率 图12 电机IM2工作效率 表7为CCBC循环工况下双电机城市客车与原单电机车型的百公里电耗仿真数据。仿真结果显示:双电机城市客车CCBC循环工况的百公里电耗为89.24 kW·h,与原单电机车型的94.37 kW·h相比,降低了5.6%。因此,同轴双电机城市客车具有更好的经济性。 表7 CCBC工况能耗仿真数据 参数单电机车型双电机车型总质量/kg16 50016 500迎风面积/m27.67.6空气阻力系数0.650.65轮胎滚动半径/mm471471滚动阻力系数0.0150.015主减速器传动比6.1712.33传动效率0.950.95百公里电耗/(kW·h )89.2494.39 本文基于中国典型城市公交工况完成了纯电动城市客车双电机系统参数匹配,按照高效率电机优先的原则设计了双电机系统的控制策略。仿真分析结果显示:双电机城市客车具有更好的动力性和经济性,验证了匹配参数的合理性以及控制策略的可行性。本文的同轴双电机系统结构简单,开发的基于规则的控制策略易于实现,具备工程实际应用的基础。4 仿真与结果分析
4.1 整车与控制策略模型
4.2 计算任务设置
4.3 仿真结果分析




5 结束语
