半挂车辆停车辅助系统设计
2019-12-17陈亚伟邵毅明郝西祥甘元艺
陈亚伟,邵毅明,郝西祥,甘元艺
( 重庆交通大学 a.机电与车辆工程学院; b.交通运输学院, 重庆 400074)
半挂车作为一种重型的运输交通工具,具有载质量大、运输效率高的优点。与“单体式”汽车相比,运输效率可提高30%~50%,成本下降30%~40%,油耗下降20%~30%。因此,半挂车是我国公路运输中不可缺少的部分,对我国物流的组织形式起到一定程度的促进作用,在物流行业具有极为广泛的应用。由于半挂车具有车身较长、结构复杂等特点(简图如图1所示),使得半挂车的驾驶难度较高,尤其是要将半挂车通过逆向倒车的方式停放在指定位置时,由于视线盲区过大,驾驶员操作稍有不慎便会发生事故。

图1 半挂车简图
在半挂车的停放过程中,驾驶员必须先将方向盘朝停车区域的反方向转动,然后到适当的时机必须及时回转方向盘,而且回转的角度要比刚开始转动的方向盘转角大。因为在倒车过程中牵引车和挂车所形成的角度会越来越小,只有及时回转方向盘才能保证连接角不会太小。最后,还要回正方向盘使半挂车停靠在合适的车位。
由此可见,半挂车的停车过程操作相对复杂,对驾驶技能要求高,没有熟练驾驶技能的驾驶员很难安全快速地将半挂车停放在指定位置上。因此,亟待开发出一种针对半挂车的停车辅助系统,以提高运输效率[1-3]。
目前,国内外关于半挂车的停车辅助系统的研究大多数都是针对特定的挂车进行控制,但在实际生产中,物流行业使用的挂车种类繁多,牵引车可与不同的挂车连接进行运输,所以此类控制方法具有很大的局限性[4-7]。为此,本文设计了一种基于自动转向控制的停车辅助系统。首先提出了停车辅助系统的工作流程,然后设计了路径跟踪控制器和连接角反馈控制器,最后进行了停车仿真试验以及不同半挂车轴距的仿真,验证了系统的性能和控制的有效性。
1 停车辅助系统控制流程
本文设计的停车辅助系统的工作过程如图2所示,其基本功能是正确识别半挂车停靠位置,辅助驾驶员控制车辆转向,沿着规划的路径行驶,顺利完成停车任务。
工作原理:首先,驾驶员设定一个目标停车位置,停车辅助系统依靠传感器获取周围的环境信息,并判断是否有足够的停车空间。如果停车空间不足,则提示驾驶员更换停车位,如果可以停车,停车辅助系统则生成一个到目标停车位置的参考路径。停车辅助系统的自动转向机构控制半挂车的转向,并沿着规划的路径行驶。
在整个过程中,驾驶员只需对半挂车的油门和制动进行控制即可,停车辅助系统会不断监测车辆位置,然后不断修正路径误差,最终安全精准地到达停车区域[8]。停车辅助系统控制的工作流程见图2。

图2 停车辅助系统控制的工作流程
2 半挂车的运动学模型
由于半挂车车速较低,可认为车轮与地面的相对运动满足纯滚动条件,即车轮相对于地面不发生滑动摩擦[9-11]。同时,在良好路面的低速行驶工况下,一般不考虑车辆稳定性控制等动力学问题,基于运动学的半挂车模型能精确描述车辆的行驶状况。因此,建立了半挂车的运动学模型,半挂车在水平地面的运动可由图3表示。

图3 半挂车运动学模型
由刚体运动学规律,可得半挂车纵向、横向、横摆和连接角的运动方程为:
(1)
(2)
(3)
(4)
ψ2=ψ1+φ
(5)
式中:l1是牵引车轴距;l2是挂车轴距;lh是牵引车后轴和连接点之间的距离;V是牵引车速度;δ是牵引车的转向角;X1和Y1是牵引车的位置;φ是连接角;ψ1、ψ2分别指牵引车和挂车的偏航角。
3 路径跟踪控制系统
半挂车在停车过程中,控制系统要实时获取两方面的信息:参考路径信息,确保半挂车自身位置处于控制范围内;车辆状态信息,确保车辆自身的稳定性[12]。
路径跟踪控制系统流程如图4所示,其中:δ*是目标转向角;φ*为目标连接角;ψE为车辆的实际偏航角;δc是实际的方向盘转角。路径生成系统规划出参考路径,路径跟踪控制器根据参考路径得到对应的牵引车转向角以及连接角。转向角和连接角经过分析计算,得到最终的方向盘转角。转向执行机构根据得到的方向盘转角控制半挂车,同时将当前时刻的位置、偏航角、连接角信息发送给路径跟踪控制器,实现闭环反馈控制过程,从而实现半挂车的自动转向控制[13]。
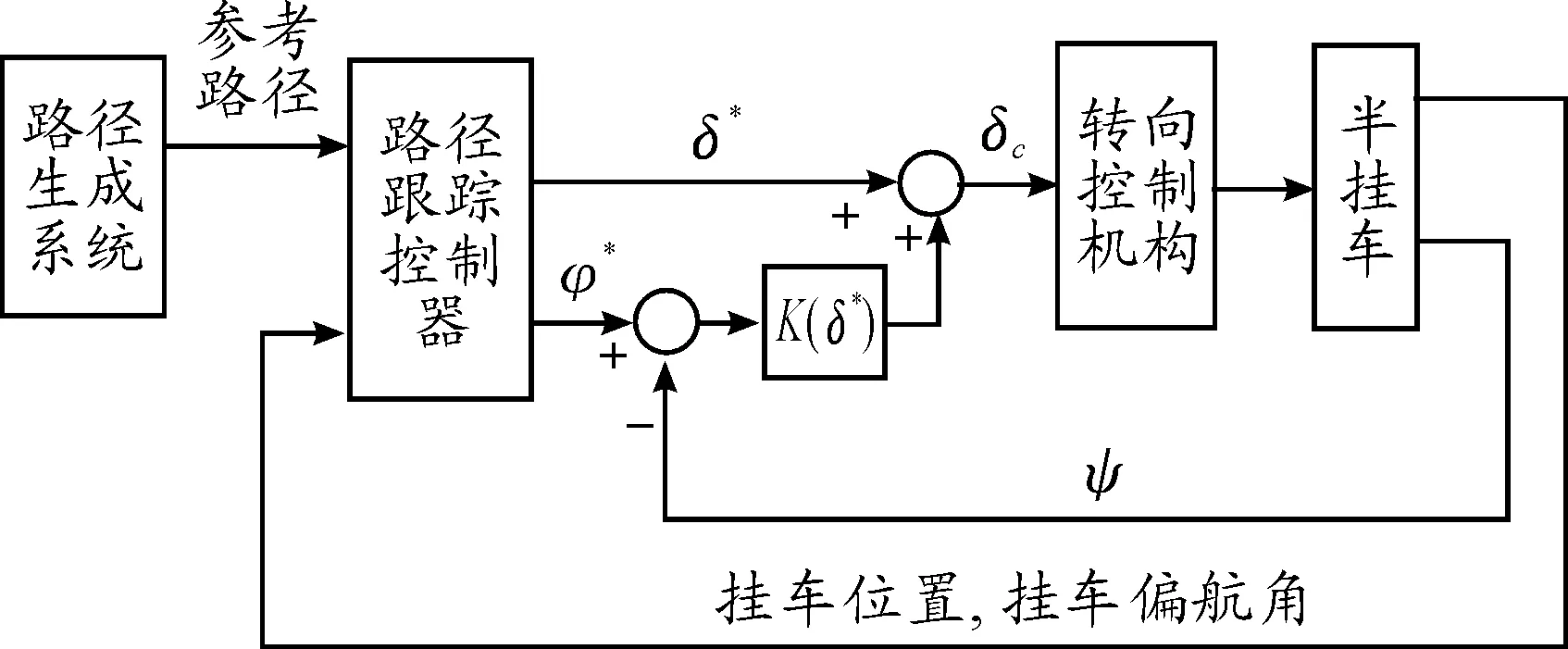
图4 路径跟踪控制系统框图
3.1 路径跟踪控制算法
本文基于提出的路径算法构建了半挂车的路径跟踪控制器。该控制器可以计算车辆的位置姿态,并使半挂车沿着规划的路线行驶[14-16]。
如图5所示,回视圆的中心点位于挂车后轴上,Lr为回视圆半径,视点P是回视圆与参考路径的交点,以该点作为每个时间步长的临时目标点,并控制半挂车跟踪该目标点行驶。由挂车的偏航角ψE可以确定与之对应的目标转向角δ*和连接角φ*,从而使得半挂车沿着规划路径行驶。

图5 路径跟踪控制算法
由分析可知,Lr是一个对路径可跟踪性有重要影响的参数。Lr的数值越小,可跟踪性越高;Lr的数值越大,车辆的稳定性越好。
为了使半挂车能精准地跟踪规划参考路径下的轨迹,需要适当的半径Lr值,且对于半挂车的转向控制必须兼顾稳定性和可跟踪性。为了达到这个目标,本文引入PD控制器来控制偏航角ψE,其表达方程为
(6)
其中KP和KD分别是PD控制器的比例系数和微分时间常数。
目标转向角δ*和目标连接角φ*可以表示为:
(7)
(8)
其中R1和R2分别是牵引车和挂车的转弯半径,其计算式如下:
(9)
(10)
3.2 连接角的稳定
当转向角和连接角分别接近目标转向角δ*和目标连接角φ*时,为了保持半挂车的操纵稳定性,必须获得连接角的反馈。
如图4所示,K(δ*)是一个反馈变量,它的值取决于每一个时间步长的目标转向角。将式(4)的车辆模型作为描述连接角的控制对象,为了确定反馈量K(δ*)的数值,在目标转向角δ*和目标连接角φ*附近对半挂车模型进行线性化,如下所示:
(11)
B(δ(t)-δ*(t))
(12)
(13)
其中K(δ*)的计算是通过在每个时间步长内对线性化的模型采用极点配置的方法求得的。
4 系统仿真验证
4.1 停车仿真分析
为验证本文所提出的控制方法的有效性和准确性,进行相关的仿真研究。半挂车停车场景如图6所示,目标停车位置为两辆车之间的区域,半挂车与停车区域垂直,即转向角δ=0°。连接角φ=0°,半挂车以1 m/s的恒定车速向后倒车行驶至目标位置。
控制器参数为Lr=8.0 m,KP=1.7,KD=1.7,极点为-0.5,用于仿真的半挂车参数如表1所示。转向角取值范围为±40°,转向角速度的范围为±20(°)/rad。参考路径由两部分直线连接组成,如图6中红色线段所示。

图6 半挂车停车场景条件及参考路径

表1 东风DFCSC9380TJZ半挂车参数
半挂车的轨迹仿真结果如图7所示。从行驶轨迹可以看出,半挂车顺利到达目标停车点,在整个停车过程中没有发生碰撞。停车完成后,半挂车姿态与周围车辆保持平行。
图8为停车过程中转向角和连接角的变化情况。从图8可知:转向角和连接角变化平缓,具有连续性,并且没有发生振荡现象,最终能够返回到0°附近。因此,由仿真结果可知本文所设计的基于转向控制的停车辅助系统具有一定的可行性。
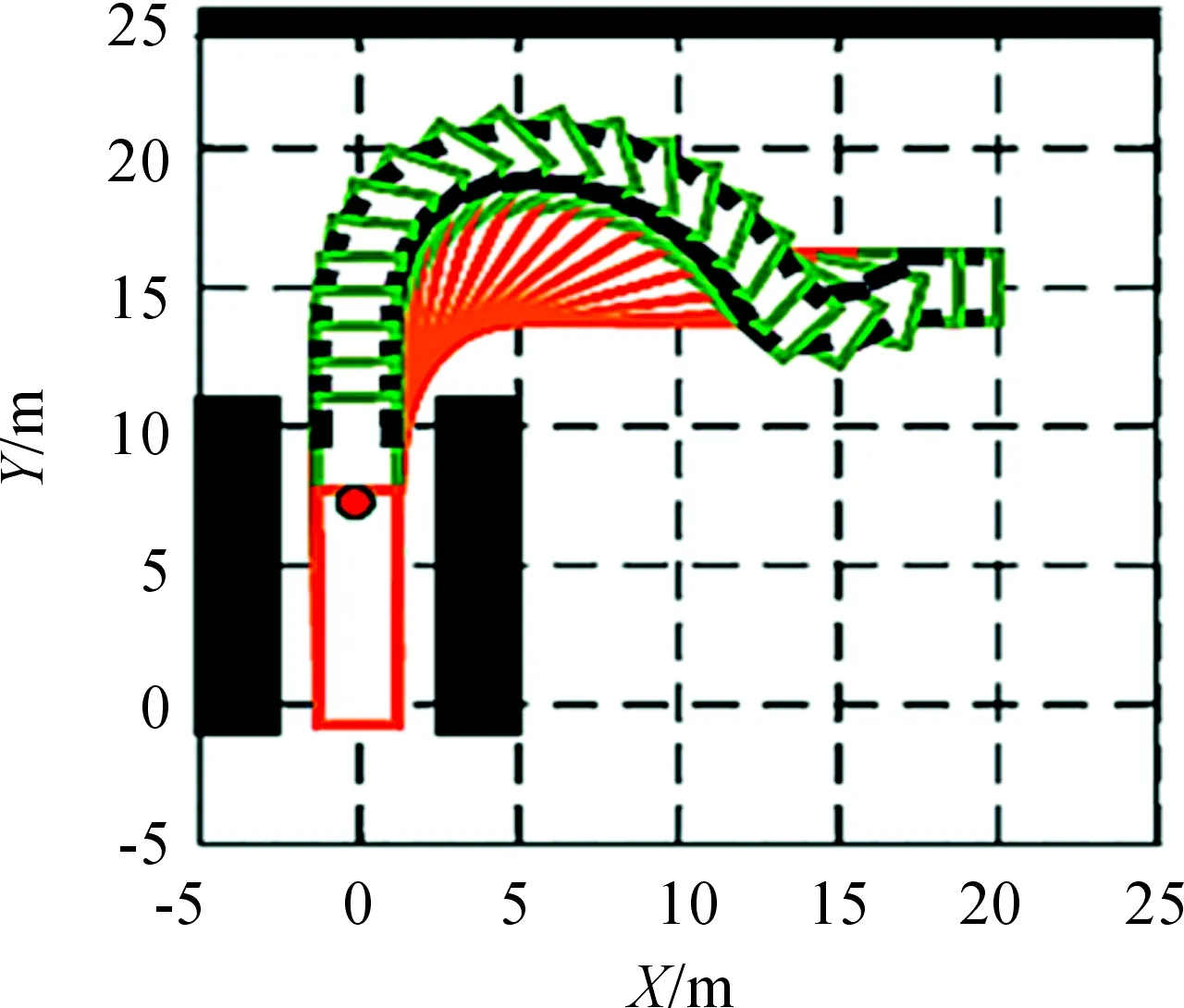
图7 半挂车倒车轨迹
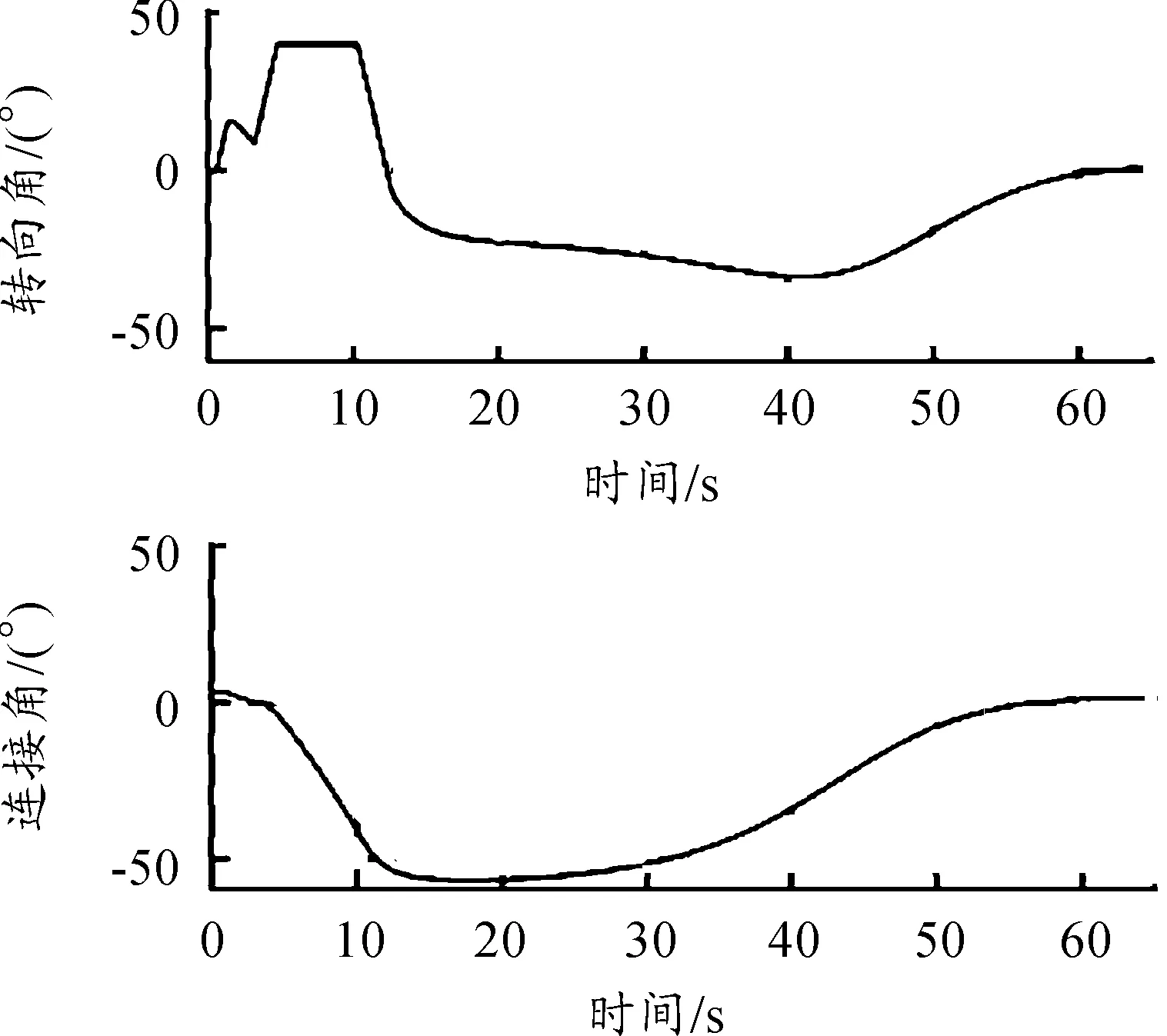
图8 半挂车转向角及连接角变化
如图9所示,改变半挂车的初始姿态,转向角δ=-6°,连接角φ=-3°,其余参数与上述仿真工况相同,半挂车的轨迹仿真结果如图10所示,仿真过程中转向角和连接角的变化如图11所示。
由图10可知,半挂车在该工况下仍然可以顺利完成停车动作,在整个过程中没有发生碰撞现象。
由图11可知,转向角和连接角整体变化平稳,并且不随时间的变化而发生较大的波动,最终返回到0°附近。由仿真结果可知,本文提出的转向控制方法具有一定的自适应性和稳定性。

图9 半挂车停车场景条件及参考路径
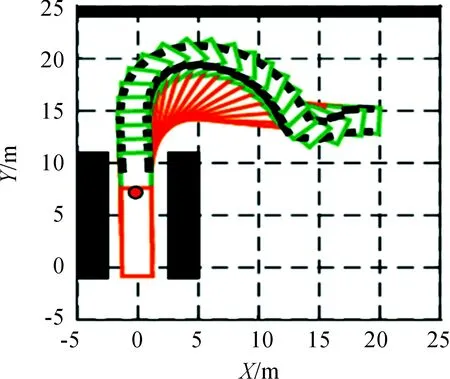
图10 半挂车倒车轨迹

图11 半挂车转向角及连接角变化
4.2 挂车部分仿真分析
如果所有停车辅助系统的设备,如传感器、ECU和转向执行机构等都安装在牵引车上,那么驾驶员便可以实现与不同挂车的切换,并且运用本文设计的停车辅助系统进行半挂车的停车作业。但是由式(7)(8)(11)可知,停车辅助系统的路径跟踪控制与挂车的轴距l2有关,不同的挂车轴距l2会产生不同的倒车轨迹,路径跟踪控制系统必须能在不同的挂车轴距下仍能保持良好的精度。因此,本文设置了不同的轴距l2,长度从5.155 m到9.155 m不等,每间隔1 m取值,以验证路径跟踪控制的有效性。
图12是挂车后轴中心轨迹,由图12可知,不同轴距的挂车都能顺利完成停车动作并到达目标停车位置,整个过程没有发生碰撞现象,且挂车的轴距l2越大,所需的转向角度越大。

图12 不同轴距的半挂车后轴中心轨迹
图13为该过程中的转向角和连接角变化。由图可知,转向角和连接角变化平缓,没有发生局部振荡,转向角不超过50°,连接角不超过60°,满足转向执行机构的要求。
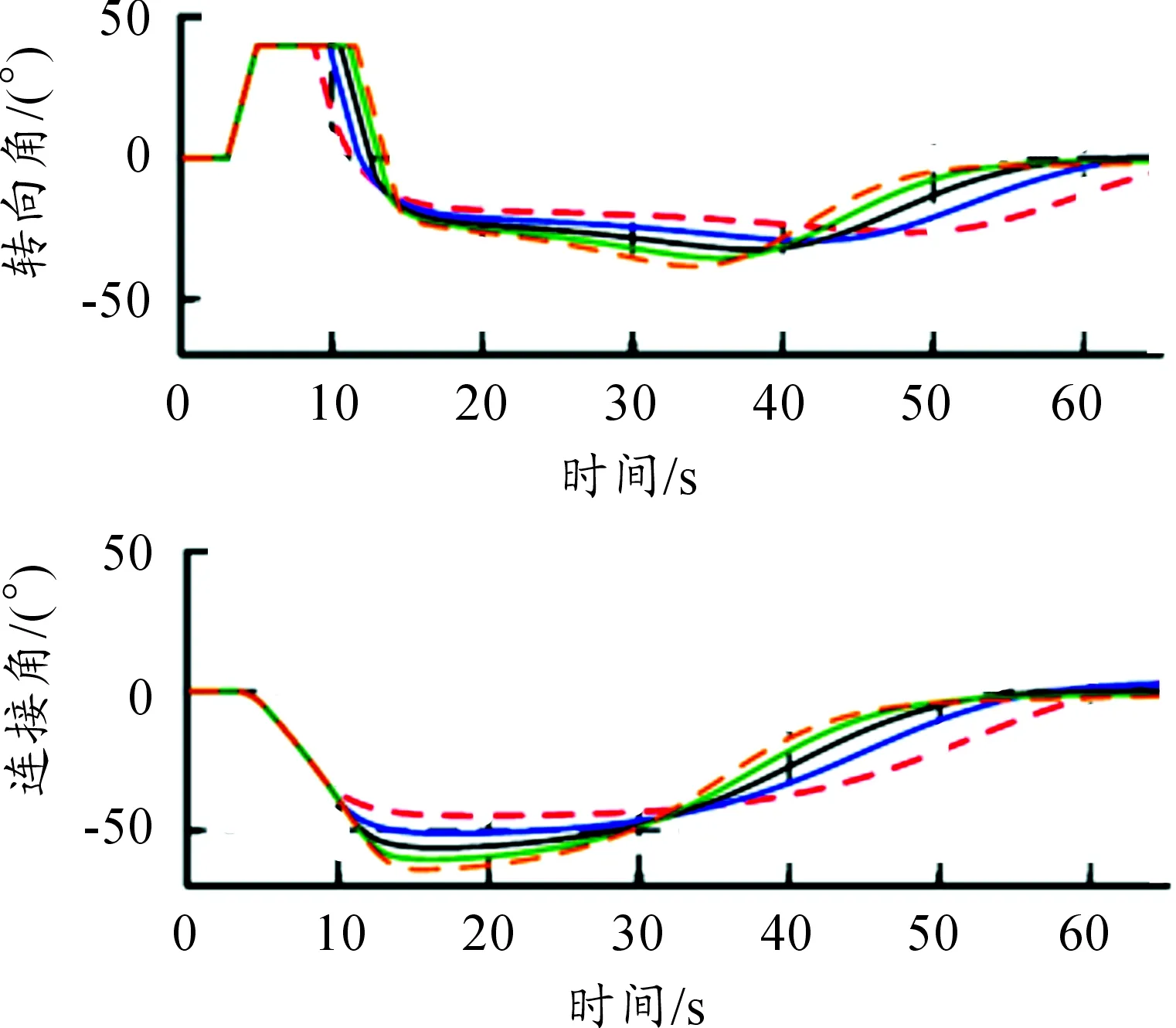
图13 不同轴距时半挂车的转向角和连接角变化
综上,半挂车可以顺利平稳地完成倒车和停车操作,不会失去稳定性。为了实现无碰撞停车操作,必须获得精确的挂车轴距l2的数值,当使用停车辅助系统时,应设置让用户输入挂车轴距l2的功能,或者添加一个轴距计算装置,通过测得的转向角和连接角的时间序列数据估算出轴距。
5 结论
本文针对半挂车倒车停放的问题,基于半挂车的结构和运动学分析,采用路径跟踪控制的方法,设计了一种基于自动转向控制的停车辅助系统。该系统主要由路径跟踪控制器和基于连接角反馈的补偿控制器两大部分组成。仿真结果表明:停车辅助系统可以实现半挂车无碰撞停车,降低了半挂车的停车操作难度,并得出如下结论:
1) 基于自动转向机构的停车辅助系统能在保证安全的前提下,通过路径跟踪控制器的作用,达到安全高效停车的目的。仿真结果表明:所设计的系统实现了半挂车的安全停放。
2) 由于挂车轴距对控制系统有较大影响,本文通过设置不同的挂车轴距进行仿真分析。仿真结果表明:停车辅助系统在不同轴距下仍能完成停车任务,具有一定的自适应性,在物流行业有广泛的应用前景。
