考虑交叉口上自行车冲突的改进社会力模型
2019-12-17朱家松陈思渊
朱家松,陈思渊
(深圳大学 土木工程学院,广东 深圳 518060)
0 引 言
随着经济发展,机动车已取代自行车成为人们主要的出行方式。为缓解汽车拥堵问题,规划者采用牺牲自行车道方式扩增机动车行驶空间,迫使自行车无路可走。近年来,“共享单车”数量呈爆发式增长,因缺少自行车交通设施,行驶空间和安全均无法得以保障,导致骑行者与行人争夺路权情形频繁出现。在复杂多织交叉口,自行车与行人的冲突尤为严重,严重影响行人通行。为避让自行车或与骑行者相互超越,行人不同程度地减速、转向,增加了交叉口旅行延误时间;此外,随机行为被认为是影响交叉口行人安全的关键因素,躲避自行车会增加了行人运动的随机性,降低了行人安全。因此,为优化交叉口交通组织,保证行人安全,需建立微观模型对行人在扰动环境下的复杂行为进行仿真分析。
社会力模型是微观行人模型的典型代表,它将个体内部动机转化为相应作用力,通过力的矢量描述行人受力。S.AXELRAD[1]首先提出个体运动行为变化是因行人在运动过程中受到力的作用;D.HELBING等[2]将上述思想公式化,建立了初始社会力模型,并在行人仿真领域产生了深远的影响;之后D.HELBING等[3-6]成功模拟了常态下单、双向行人流的自组织现象,并深入分析了恐慌状态下行人的动态特征,引入惶恐因子,模拟了紧急状态下因行人堵塞而导致的自动跟随等经典现象。研究者开始结合行人运动的实际情景,通过在原模型上修正或加入新元素开发出新的社会力模型。HOU Lei等[7]观察到在疏散过程中行人更倾向于跟随领先的行人,进一步分析了疏散领导人数和位置对疏散过程的影响,建立了考虑领导力作用的社会力疏散模型;ZENG Weiliang等[8-10]分析了信号交叉口的行人行为特殊性,提出人行横道上行人运动受信号控制影响,对初始模型结构、算法及参数等进行了探究和优化,并建立了交叉口上微观行人模型。在此基础之上,LIU Manxia等[11]分析了行人在人行横道上的各种相互作用,特别考虑了逆流行人的避碰行为及先导行人的跟随行为,提出了一种基于真实轨迹数据的微观模型标定方法,建立了行人与周围行人及车辆在人行横道上相互作用的微观模型。上述研究成果为行人模型发展奠定了基础,但已有的研究多基于已设置自行车道的国外城市交通系统,或忽略了国内因自行车行驶空间不足导致的人车冲突,且缺乏准确的行人轨迹观测数据,在模拟国内行人流上存在缺陷,降低了仿真精度。
针对上述问题,笔者基于社会力理论对自行车干扰力进行建模,并从行人期望、边界作用、与周围行人的相互干扰、自行车冲突及转弯车辆穿越等5个方面分析行人动态行为,建立新的交叉口行人模型。另外,为避免传统拍摄角度限制,利用无人机视频采集、提取了完整的行人过街轨迹特征,并基于最大似然估计方法对模型参数进行标定。最后,引入传统模型的仿真结果作对比,验证了改进模型的仿真精度。结果表明:改进后的社会力模型能更真实地描述行人在扰动环境下的复杂行为。
1 改进的行人社会力模型

(1)
式中:ξ为合力的随机波动项,来源于行人偶然或故意偏离正常运动规则的行为,是随机和非系统的,代表不确定的行人行为。
为验证模型仿真效果,引入Verlet算法[12]拟合行人轨迹,利用t和Δh时刻行人的位置x(t)和加速度a(t),更新t+Δh时刻行人的新位置x(t+Δh)。
将x(t+Δh)和x(t-Δh)进行泰勒展开,如式(2):
(2)
将以上两个表达式相加,得到位置表达式,如式(3):
x(t+Δh)=2x(t)-x(tΔh)+a(t)Δh2
(3)
继续对式(3)进行微分,得到速度和加速度表达式,如式(4)、(5):
(4)
a(t+Δh)=a(t)+b(t)Δh
(5)
将式(5)中的b(t) 代入式(4),得到行人速度及位置的更新方程,如式(6)、(7):
v(t+Δh)=v(t)+1/2[a(t)+a(t+Δh)]Δh
(6)
x(t+Δh)=x(t)+1/2[v(t)+v(t+Δh)]Δh
(7)
式中:Δh为固定时间间隔。
1.1 自驱力
(8)
(9)
式中:Pe为行人出口位置;Pα为行人当前位置;vi为行人实际速度;τi为由实际速度恢复到期望速度的时间。
1.2 边界作用力

(10)
式中:PB为行人α距离人行道边界最近的位置;Ab为边界作用力强度;Bb为边界作用力范围;nB为行人与边界之间的单位向量,行人位于边界内时,nαB是由行人α指向边界B的向量;行人踏出边界后,nBα是由边界B指向行人α的向量。
图1 人行横道边界的排斥力和吸引力Fig. 1 Repulsion and attraction of crosswalk boundary
1.3 周围行人间排斥力
行人间作用力是行人为与周围行人保持距离所施加的力。根据原社会力模型中描述行人间相互作用的椭圆势场Ⅰ,忽略身体挤压和滑动摩擦力,得到行人间相互作用力表达式[14],如式(11):
fαβ(d)=-dαβVαβ(bα β)
(11)
假设行人作用势场Vα β(bα β)具有椭圆等势线,是依赖于椭圆短半轴bα β的递减函数,如式(12):
(12)
椭圆势场的短半轴bαβ如式(13):
(13)

(14)

(15)
当Δt=0时,行人间相互作用力可表述为式(16):
fαβ(d)=Aαβe(rαβ-dαβ)/Bαβnαβ
(16)
式中:Aαβ为行人之间相互作用力强度;Bαβ为行人之间相互作用力范围;dαβ为行人α和β的距离;rαβ=rα+rβ,表示行人α和β半径和;nαβ=[xα(t)-xβ(t)]/dαβ,表示行人β指向α的单位向量。
1.4 自行车排斥力
为同时满足自行车和行人在下一仿真步长中的需求空间,提出改进的椭圆势场Ⅱ[14],假设自行车的作用力势场如式(17):
Vαγ(bαγ)=AαγBαγe-bαγ/Bαγ
(17)
则自行车对行人的作用力fαγ如式(18):
fαγ=-dαγVαγ(bαγ)
(18)
考虑到自行车与行人的速度差异,假设椭圆势场Ⅱ的短半轴bαγ如式(19):
(19)
式中:dαγ为自行车γ指向行人α的距离矢量;vγ为自行车γ的速度;vα为行人α的步行速度。
为验证椭圆势场Ⅱ在描述自行车干扰模式上的优越性,笔者设计了仿真试验,对比椭圆势场Ⅰ和Ⅱ。假设自行车静止不动,根据式(19)得到短半轴bαγ如式(20):
(20)
根据式(13)得到式(21):
(21)
1.4.1 试验1

图2 情景1Fig. 2 Scenario 1
1.4.2 试验2
图3 情景2Fig. 3 Scenario 2
1.5 转弯车辆作用力
右转车辆与行人的冲突通常发生在行人相位,转弯车辆会冒险利用较小的行人间隙通过路口。与自行车对行人的干扰作用类似,转向车辆对行人施加排斥力,迫使行人减速、绕行。考虑到机动车辆与行人间速度差异,使用改进椭圆势场Ⅱ模拟转向车辆对行人的作用力fαω,如式(22):
fαω=-dαωVαω(bαω)
(22)
其中:车辆ω对行人α作用力势场的椭圆短半轴bαω如式(23):
(23)
假设转向车分别在不同位置上静止不动,当行人以速度vα朝着对向出口移动时,距离行人越近的车辆,作用力势场的椭圆短半轴bαω越小,行人所受作用力越大,即转向车辆施加的排斥力与车辆和行人间距离成反比,仿真结果与真实情况一致,如图4。
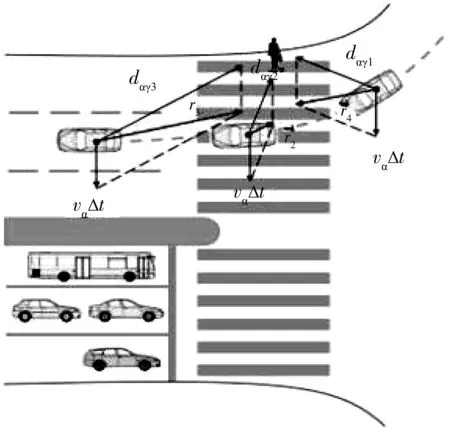
图4 行人与转向车辆冲突的受力Fig. 4 The force of collision between pedestrian and turning vehicle
2 模型校准
2.1 数据采集
为具体分析上述因素对行人行为影响,笔者选取了深圳市南山区科发路与科苑北路交叉口作为研究地点,该区域位于科技园中心,承担着周围商业中心及工业园区大量交通运输任务。调查时间为上下班及午休高峰时期,因为该时间内人流量最大,确保有足够行人及自行车样本。笔者利用无人机视频采集数据(图5),每0.1 s提取视频中行人、骑行者、转弯车辆在交叉口的轨迹用于模型标定[15]。根据这些数据,所有相关变量,如位置、速度矢量、加速度、行人和其他人之间距离可直接或通过间接差分得到。
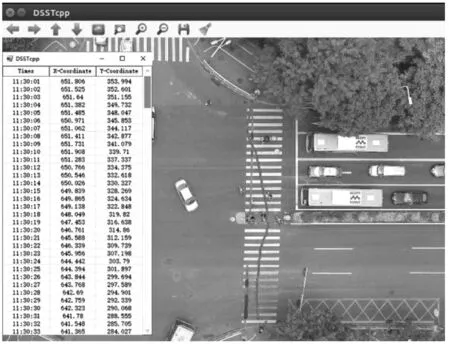
图5 基于无人机的行人数据采集及提取示意Fig. 5 Pedestrian data acquisition and extraction based on UAV
2.2 模型标定
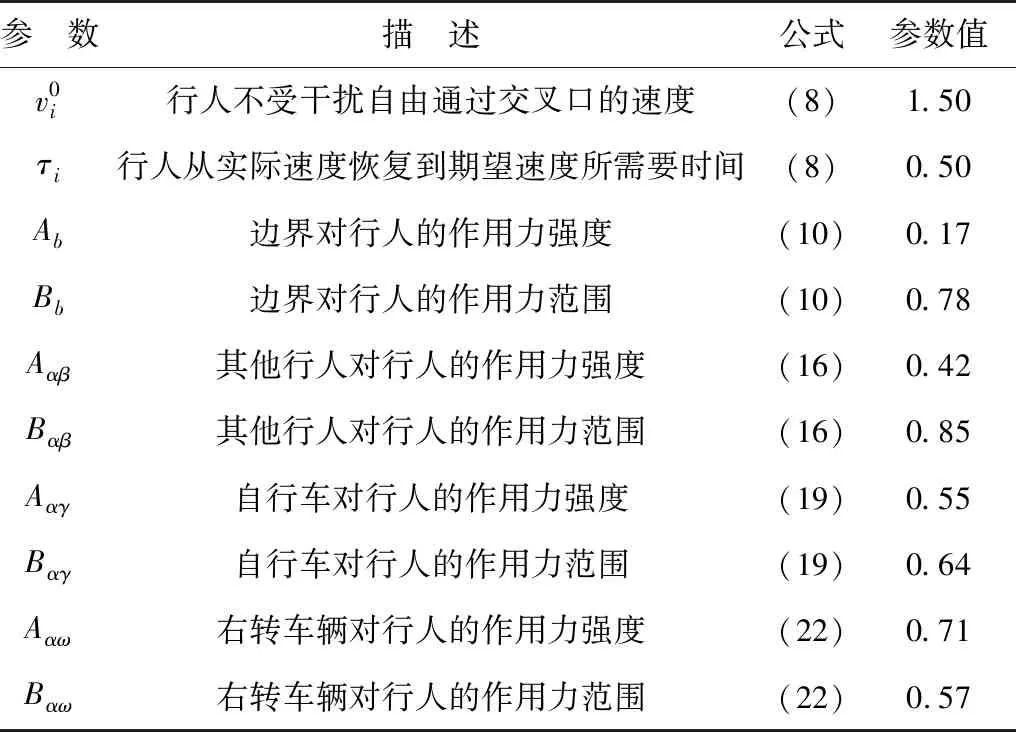
表1 模型标定结果Table 1 Model calibration results
假设下一仿真时刻Pα(tk+1)的位置通过模型参数θ预测得到,点Pα(tk)到Pα(tk+1)的移动距离服从均值为μ、标准差为σ的正态分布,根据观测数据预估单步距离Δdα(θ)的均值μ和标准差σ,得到关于θ的似然函数如式(24):
(24)
为简便计算,将式(24)两边同时变成对数函数,估算使对数似然函数L(θ)达到最大时的模型参数θ值,如式(25):
(25)
3 案例分析
为验证模型性能,需将理论计算行人过街位置分布与实际观测结果进行对比。本研究共提取2 134条有效行人时间序列轨迹作为观测数据集,其中有203条数据是自行车干扰下的行人过街轨迹。因此,笔者从上述观测数据中选取了两条自行车扰动下行人过街轨迹,假设行人质量m∈[45,75]kg,仿真间隔Δt=1 s,分别利用原始模型和改进模型对行人位置进行仿真建模,并与观测结果进行比较。
3.1 行人过街案例Ⅰ
行人穿越交叉口示意Ⅰ,如图6。
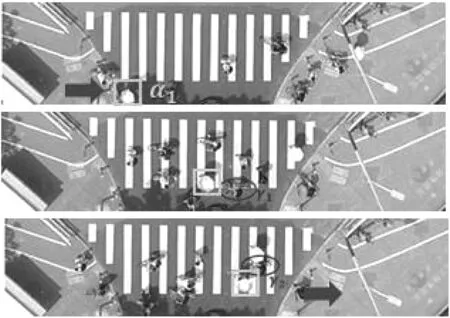
图6 行人α1穿越交叉口示意Fig. 6 Illustration of the tested pedestrian α1 crossing the intersection
利用改进模型具体分析行人受力情况,如图7。整个过程中边界力始终存在,0~17 s行人位于边界外侧,作用力为吸引力,与行人到边界距离成正比;随后行人踏入人行道内,转受边界排斥力作用,该力与行人到边界的距离成反比。而自行车排斥力一开始为0,19~32 s行人与骑行者γ1、γ2发生冲突,两者距离减小,作用力骤然增大,一旦行人超越自行车后,自行车作用力逐渐减小恢复到0。
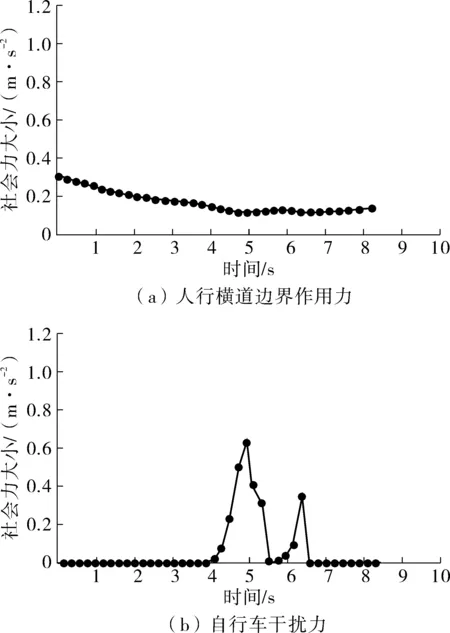
图7 改进模型中行人受力权重Fig. 7 Weight of pedestrian force in the improved model
图8显示了不同模型下行人α1的预估位置和轨迹。为直观比较模型性能,分别计算预估轨迹在x和y方向上的平均绝对百分误差(MAPE)。结果表明:传统模型下y方向MAPE=7.89%;改进模型下y方向的MAPE=6.19%。由图7可知:两模型的差异主要体现在行人与自行车冲突区域,改进模型的预估位置更接近行人真实位置分布,得到的行人轨迹更为准确。
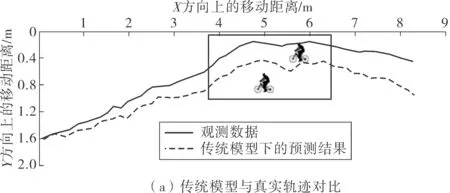
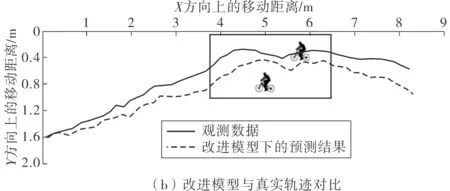
图8 传统模型和改进模型的预测轨迹与观测数据的对比Fig. 8 Comparison between the predicted trajectory of traditional model and improved model and the observed data
3.2 行人过街案例Ⅱ
行人穿越交叉口示意Ⅱ,如图9。
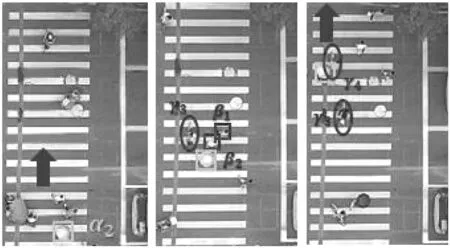
图9 行人α2穿越交叉口示意Fig. 9 Illustration of the tested pedestrian α2 crossing the intersection
笔者具体分析了周围行人、边界作用和自行车排斥力对行人α2的作用强度,如图10。自行车排斥力对行人行为影响最大,这是由两者间的速度和间距共同导致。行人间相互作用力次之,0~40 s内行人α2与周围行人的冲突导致作用力产生,且该力与行人间距离成反比。由于一直在人行横道内,边界施加的排斥力始终存在,迫使行人与边界保持距离。
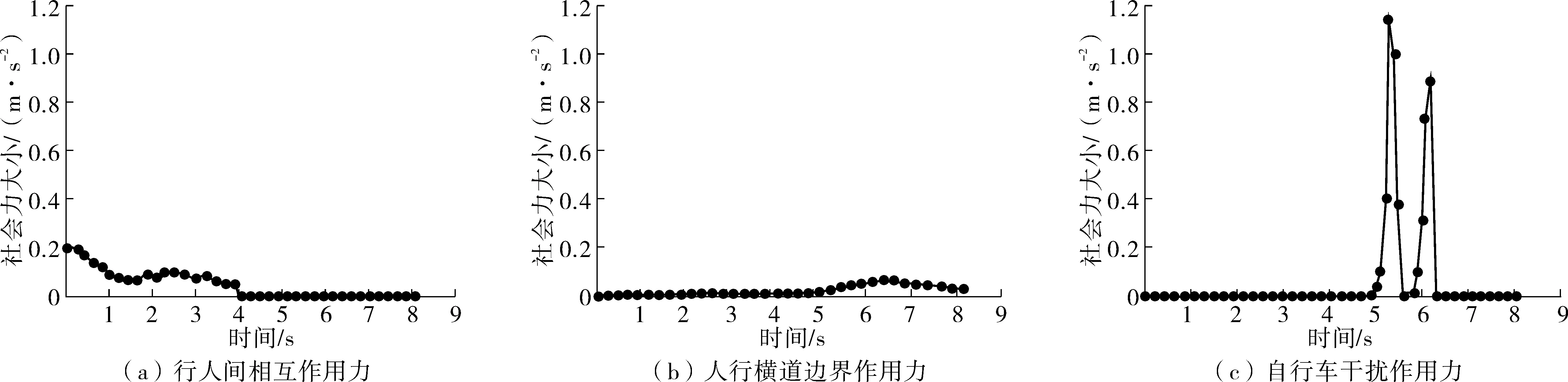
图10 改进模型中行人受力权重Fig. 10 Weight of pedestrian force in the improved model
将不同模型计算得到的行人过街位置分布与观测结果进行对比,如图11。
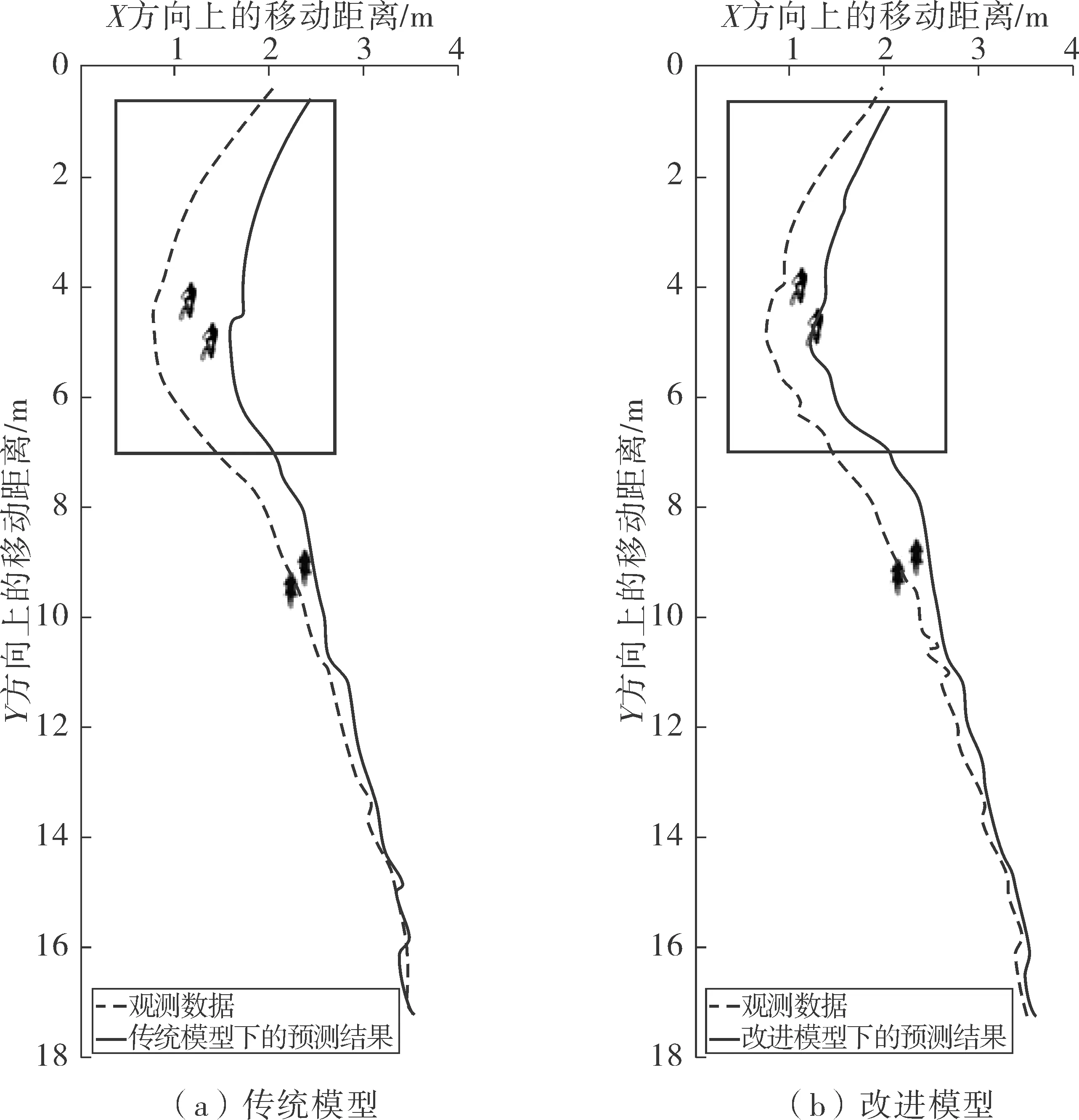
图11 传统模型和改进模型的预测轨迹与观测数据的对比Fig. 11 Comparison between the predicted trajectory of traditional model and improved model and the observed data
由图11知:传统模型下的MAPE=12.43%,而在改进模型下为MAPE=9.04%,改进行人模型能更合理地描述行人在自行车干扰条件下的随机行为。此外,由于MAPE统计的是每一步仿真中预估位置平均误差,它将冲突区域内模型误差平均分配到整个仿真过程中,导致模型仿真精度的差异在数值上体现不明显。
尽管改进模型弥补了原社会力模型对自行车扰动下行人行为仿真的不足,但所提出模型预测结果与观测数据间仍存在较小误差,造成该现象的主要原因有:
1)文中行人位置更新是由当前时刻和上一时刻的加速度共同决定,更新位置时默认上一时刻加速度始终存在且不变。然而,现实世界中行人具有随机性,加速度会突然变化甚至为0,这对行人位置精准建模有影响;
2)考虑到交叉口受较大流量的机非混合交通流影响,而可用于研究的观测数据有限,并不能完全真实有效地代表行人实际运动情况。因此,在利用观测数据对模型参数进行标定时也存在一定误差;
3)尽管无人机采集避免了传统拍摄角度造成的轨迹不完整问题,但无人机在拍摄中不可避免地会产生轻微移动,降低信息提取的准确性。
4 总结及展望
4.1 总 结
笔者阐明了交叉口行人行为研究的必要性,考虑到自行车导致的人车冲突,提出了一种考虑周围行人、边界、自行车和转弯车辆避碰行为的修正社会力模型。其次,基于无人机视频采集、提取了完整的行人过街轨迹特征,并结合统计学原理将最大似然估计法应用于模型标定。最后,在分析改进模型仿真精度的基础之上,引入传统模型的预测结果做比较,进一步验证了改进模型在模拟自行车扰动环境下行人复杂行为的优越性。本研究的主要贡献如下:
1)针对自行车需求激增导致的人车冲突,在经典社会力模型基础上加入了自行车作用力模型,分析验证了人车冲突的内在规律,这对行人仿真研究和优化交叉口组织至关重要;
2)不受传统采集技术拍摄角度限制,利用无人机获取行人过街数据,并基于视觉算法实现目标动态跟踪,完整提取了行人全时空信息;
3)引入最大似然估计标定模型参数,对周围行人、自行车、转向车辆及边界对目标行人的作用范围及程度进行量化,为后续研究者在参数标定上提供有用参考。
4.2 展 望
本研究解决了对自行车干扰作用建模的问题,进一步完善了行人行为模型,提升了仿真精度。但在后续研究工作中仍有一些问题需关注:
1)文中采用无人机采集数据进行模型校准,但考虑到无人机在市中心区域使用的可操作性和安全性,后续考虑利用卫星影像等遥感手段获取其他数据继续进行研究;
2)后续应进一步将行人、自行车违章情况纳入研究,分析行人年龄、性别等各向异性对行人行为的影响。
