基于几何特性的电气化铁路支撑装置管帽定位算法研究
2019-12-17王硕禾巩方超
韩 帅, 王硕禾, 巩方超
(石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043)
接触网悬挂检测监测装置(4C)通过安装在高速巡检车车顶的高速高清摄像头采集接触网悬挂的图像信息,然后运用数字图像技术对采集的图片进行识别,判断支持装置故障。针对4C图像的故障识别,国内外学者已经做了很多相关研究。张春春等[1]利用机器学习和几何特征完成了接触网定位线夹的状态识别;李岩[2]利用HOG+SVM 完成绝缘子的定位,然后利用灰度统计特征完成其故障识别;韩烨等[3]利用HOG 特征与二维Gabor小波变换完成了支撑装置耳片断裂故障识别;但是对于支撑装置的管帽定位识别问题,还没有学者做过相关研究。以北京铁路局集团公司供电部门数据采集车采集的4C图片(4 400×6 600)为研究对象,提出了一种基于支撑装置几何特性的管帽区域定位算法。
1 预处理
1.1 直方图均衡化
由于数据采集车是夜间拍摄,会出现支撑装置补光不足的情况,使采集到的图像较暗,整体像素灰度值偏低,对比度不明显,如图1。这会影响定位的准确性。因此必须对该类图片进行处理。
本文采用直方图均衡化的方法,对图像进行调整[4]。基本思想是通过灰度级的概率密度函数求出灰度变换函数,从而得到新的图像灰度,变换函数如式(1),调整后结果如图2。

式中,ni为灰度值为i的总像素数;N 为图像总像素数;L=256;Pr(rk)为灰度级出现的相对频数。

图1 支撑装置图片及其直方图

图2 均衡化后支撑装置图片及其直方图
1.2 调整图像分辨率
现场采集的图像为4 400×6 600,对于图像处理技术来说,图片过于巨大,这会大大增加算法的运算量,严重拖慢算法运行速度。因此在预处理阶段可以先降低图片的分辨率,以缩小后的图像为对象继续后续的算法处理[5]。而降低图像分辨率则必定会使图像的某些细节信息丢失,因此在降低分辨率的同时,最大程度的保留细节信息是该步的重点。双线性插值法考虑原始图像像素之间的关联性,可以保证缩放后图像的连续性,不会出现人为加工的痕迹,可以最大程度的保留图像的细节[6]。
对于某个坐标,通过向后映射,得到它在原图中的浮点坐标(i+x,j+y),其中,i,j为非负整数,x,y∈[0,1]。则该像素的值I′(i+x,j+y)可由原图中I(i,j),I(i+1),I(i+1,j),I(i+1,j+1)4个像素点确定[7],利用双线性插值原理即可得到:I′(i+x,j+y)=(1-x)×(1-y)×I(i,j)+(1-x)×y×I(i,j+1)+x×(1-y)×I(i+1,j)+x×y×I(i+1,j+1)。
2 管帽区域定位
图3(a)、图3(b)为现场采集的支撑装置图像,图3(c)为局部放大图,可以看出现场照片存在各种情况,包括拍摄的结构不全,角度不同,拍摄的部位不同等情况,这会给定位带来很大的困难,本文算法就是针对该问题而提出的。
分析支撑装置的结构特点,可以看出支撑装置主体腕臂钢管表面都有亮银色的镀锌涂层,这使得其在图片中的灰度值普遍大于其它部位;还可以看出凡是带有管帽的腕臂钢管,其高亮的银色涂料部分(R区域)都会被U 型抱箍和链接套管分成几段,而不带有管帽的腕臂钢管的高亮银色涂料部分则是一个完整的连通区域。该特点属于支撑装置本身的结构特点,且不会因为支撑装置结构拍摄不完整和拍摄角度的变化而改变,因此以此结构特点作为入手点,实现管帽区域的定位。

图3 现场支撑装置图像
2.1 银色镀锌部分提取
2.1.1 二值化提取镀锌部分
为了提取支撑装置的R 区域,需要对缩小后的图像进行二值化。由图3(a)可以看出,R 区域的灰度值在整个图像中是最大的。因此,当二值化阈值选择为稍小于R 区域灰度值时,比较此时像素与设定阈值大小,如果其数值大于阈值,则该像素点设置为白色;若小于阈值则设为黑色[4],如公式(2)所示这样即可把R 区域提取出来。

2.1.2 二值化阈值选择
如图3(a)所示,在整幅图片中R 区域是灰度值最大的区域,但是也存在某些非R 区域(如定位套管),虽然其灰度值小于R 区域,但是两者灰度值比较接近。对比支撑装置主体结构可知,若把二值化阈值从小到大逐步变化,则银色部分形成的连通区域个数是最多,且其形成的连通区域中面积最小和最大的连通区域的面积相差也不超过25倍。
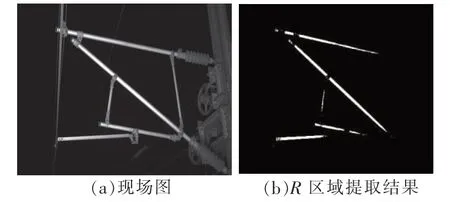
图4 二值化提取银色部分效果
根据二值化后连通区域的数量来确定阈值。根据大量现场图片直方图分析可知,R 区域的灰度值都在120以上。留下一定的阈度,把阈值从100以一定的步长逐步增加到255,以每个阈值对缩小后的图像进行二值化,然后统计一幅图中最大连通区域的面积,为了排除某些区域极大值的干扰,对于某个连通区域,如果其面积大于最大连通区域面积的1/25则保留;否则舍去。最后统计图中所有剩下的连通区域个数,选择连通区域数量最大的阈值,作为最终的二值化阈值,这样就可以非常准确地提取R 区域,提取效果如图4所示。
2.2 连通区域中心
连通区域中心是根据连通区域中所有的点计算得到的,其计算公式

根据上步删选出的R 区域,求取每个连通区域的中心点像素坐标。由于连通区域中心求解涉及到多次循环,如果图片过大,则会严重影响程序的运行速度。因此,选择在预处理阶段缩小后的图片中求解每个连通区域的中心坐标。然后根据缩小前后图像中的像素坐标对应关系,即可推出原图中对应的中心坐标[7]。
2.3 每个连通区域对应直线
求解该步,需要用到支撑装置完整结构的二值化图像,为了得到支撑装置的完整二值图像,设定较小阈值,对原图像进行二值化[8],同时为了排除噪声和背景干扰,根据大量数据对比实验,选择10为阈值,效果最佳。
如图5,在二值化后的图像中标记上步得到的连通区域中心。利用最近像素法求每个连通区域对应的直线,中心点局部示意如图6所示。中心点位于银色钢管二值化连通区域,在图5二值图中,银色镀锌部分为长条形,且两边平行。根据几何原理可知,距离该中心点最近的黑色像素点与中心点的连线必定垂直于边界。由此就可以得到一个区域对应的平行直线。由于该方法是像素级操作,图像分辨率越高准确性越高。因此,在原图的二值图像中用最近像素法求解平行线。所有连通区域对应直线如图7所示。

图5 小阈值二值化及中心点标记
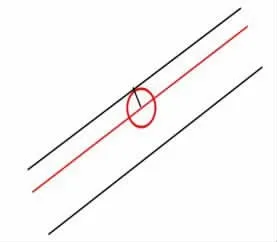
图6 最近像素法原理
2.4 直线合并
所有连通区域对应直线如图7。带有管帽的钢管对应的直线大于一条;没有管帽的钢管则只对应一条直线,设定直线个数阈值为1。任意2个连通区域中心之间可以确定一条直线,若这2个连通区域处于同一条腕臂上,则这条直线与这2个连通区域单独确定的2个直线斜率是非常接近的。把所有直线按照斜率以及对应的连通区域中心点两两形成的直线斜率分类[9]。把所有直线类别中直线个数小于阈值的类舍去,剩下的即为有管帽的钢管对应的直线。
因为钢管长条形是由一个个像素组成,因此其边界不是平滑的直线,而是呈现像素交错排列的锯齿状。因此上步所求的每个连通区域对应的直线斜率都有一定的误差。但是由于图片是6 600×4 400的,几个像素的误差对直线的角度影响很小。且由于每个带有管帽的钢管对应多条直线,每条直线都有一定的不规律的小误差,因此求一个钢管对应的唯一一条直线,可以采用求处于同一类中所有连通区域单独确定的直线和该类中的连通区域两两之间确定的直线的所有斜率均值的方法来确定合并后的唯一直线斜率;同时求取该类中所有连通区域中心坐标的均值,结果作为合并后直线的中心点。这样就可以确定每条带有管帽的腕臂对应的唯一直线,实验结果见图8。

图7 连通区域所有直线
2.5 管帽端定位
从上步求得的唯一直线合并后的中心点坐标出发,沿直线向两端进行逐像素搜索。遇到第一个黑色像素点或超出图像范围则停止搜索,并记录该点坐标。结果如图9所示。

图8 直线合并
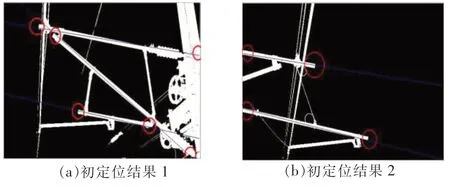
图9 管帽区域初定位
图9显示了初定位后得到的几种典型端点类型,由于存在拍摄的照片支撑装置不完整,或者图中不存在管帽部位,这时就需要进一步从所有定位到的端点中删选出管帽区域。
分析支撑装置结构特点,可以发现带有管帽的腕臂其管帽末端与该腕臂上距离管帽末端最近的银色连通区域中心的距离处于一定范围内,且远远小于腕臂另一端末端与距离其最近的银色连通区域中心的距离,根据此特征即可确定上步定位到的端点是否为管帽端。
根据大量现场图片分析,支撑装置在所有图片中尺度变化不是太大,管帽末端与距离其最近的处于同一腕臂的连通区域的中心之间的距离处于一定范围内(30~280),而不是管帽端的话,两者之间的距离会远远大于280。通过此特点,设定距离阈值D=300。统计定位到的端点和距离其最近且处于同一腕臂的连通区域中心之间的距离,若该距离小于D,则确定该端点为管帽端,否则为非管帽端;同时,对于定位到的端点坐标,如果处于图像的边缘,则舍去该端点,如式(4)所示。即可精确定位管帽端,最后以定位到的管帽端顶点坐标为中心,截取管帽区域,定位结果如图10所示。

式中,D 为定位的端点与距离其最近的处于同一腕臂的银色连通区域中心点之间的距离。

图10 定位结果
3 实验结果
为了对算法性能进行分析,在直线检测阶段把算法与传统的Hough变换方法进行了对比;并随机选择现场图像样本,对本文的定位算法进行实验。
3.1 Hough变换腕臂直线检测与本文腕臂直线检测方法对比实验
3.1.1 Hough变换法腕臂直线检测
传统的Hough变换腕臂直线检测的思路为:首先对图像进行滤波去噪预处理,对预处理后的图像进行边缘检测;然后利用Hough变换直线检测算法提取边缘图像中的直线特征[10];最后融合所有检测到的直线,得到最终的直线检测结果[11],如图11所示。图12为本文直线检测结果。

图11 Hough方法检测结果

图12 本文检测结果
3.1.2 对比实验及分析
选择50张不同类型的现场支撑装置图片,其中包括完整支撑装置结构的、不同部位支撑装置结构、正反定位、不同补光强度等类型,分别用2种方法进行检测实验,实验结果如表1所示。 由检测结果可以看出:Hough变换检测方法虽然可以检测出图像中的直线特征,但是检测出的结果仅仅只是腕臂的边缘部分直线特征,检测效果极差,存在很多误检和漏检情况,且检测时间相比于本文方法也较长。而本文方法不仅可以很好地检测腕臂的直线,而且该直线处于腕臂上,可以很好地代表腕臂直线,检测准确性远远高于Hough方法,且在检测时间上也优于前者。因此,本文提出的线检测方法更加适用于支撑装置的腕臂直线检测。

表1 Hough检测与本文检测实验结果
3.2 本文管帽定位算法实验
选择50张不同类型的现场支撑装置图片,其中包括完整支撑装置结构的、不同部位支撑装置结构、正反定位、不同补光强度等类型,利用本文检测算法进行定位实验,结果如表2所示。

表2 本文方法实验结果
4 结语
根据实验,本文算法可以很好地完成管帽区域的定位,检测结果不受光照、角度和支撑装置拍摄的完整性影响,鲁棒性强;在检测时间方面平均每张图像的处理时间不到1 s,满足实际应用的要求,具有较好的实用前景和研究意义。
