应用于小型弹载解算平台的NandFlash智能化设计方案
2019-12-16许廷金胡陈君
许廷金,李 杰,胡陈君,高 宁
(1.中北大学 电子测试技术重点实验室,山西 太原 030051;2.苏州中盛纳米科技有限公司,江苏 苏州 215123)
0 引 言
为了适应未来信息化、制导化的作战特点,实现低成本常规弹药打击精度高的作战指标,新型弹载导航系统不仅需要具备强大的抗干扰能力和良好的环境适应性,还要具备体积小、精度高、容量大等优点[1].导航解算平台的解算精度对弹体的飞行轨迹有着至关重要的作用,而外场试验环境千变万化,诸多参数(如:射向、发射地经纬高等)在发射前短时间内才能确定,若在发射前修改应用程序,修改后的程序未经长期测试,可能会产生隐患,降低系统可靠性.因此进行现场参数装订至关重要.此外由于C6000系列DSP内部没有自带Flash,所以用户应用程序需要存储在外部Flash中[2],而NorFlash写入和擦除速度较慢且容量小,不满足新型弹载导航系统的大容量应用需求.
基于以上分析,本文选用NandFlash(K9K8G08U0M)作为系统的存储芯片.NandFlash具有快速访问、低功耗、抗震性、体积小、重量轻等特性,并且稳定性良好,即使在系统电源关闭的情况下仍可保存数据[3],能够满足弹载导航解算平台的应用需求.
1 系统设计方案
1.1 系统存储方案设计
弹载导航系统以DSP为解算主控芯片,DSP上电复位后,根据预设的启动模式,DSP控制NandFlash将应用图像脚本自动加载到片内SRAM中,程序在片内SRAM中高速运行[4],同时读取NandFlash中预设位置提前装载的参数信息发送到上位机实时显示,对装订信息进行校对,最后DSP接收FPGA打包的IMU和GPS数据进行实时导航解算,并将解算数据存储到NandFlash中.详细结构如图1 所示.
1.2 TMS320C6748与K9K8G08U0M的硬件连接


图2 DSP与NandFlash硬件连接图Fig.2 DSP and NandFlash hardware connection diagram
2 TMS320C6748的NandFlash程序加载原理
BOOT过程,就是处理器的自动加载启动过程,就是处理器在上电或复位后,根据BOOT引脚设定的不同的加载模式,将可执行代码(AIS)自动加载到内存中,并正确运行程序的过程[6-7].TMS320C6748内部集成了自动加载器(Rom Boot Loader)来实现Boot过程,RBL存储在0x00700000~0x007FFFFF的1 024 KB的L2ROM空间内,该空间只能用来开机引导,不可存放应用代码,其启动模式配置如表1 所示.用户应用程序能被DSP正确引导的前提是将其转化成AIS脚本[8-9],DSP内部ROM区固化程序通过识别AIS格式指令将用户应用程序加载到L2RAM(0x11800000-0x1183FFFF)中,并从指定初始地址(0x11800000)开始运行.
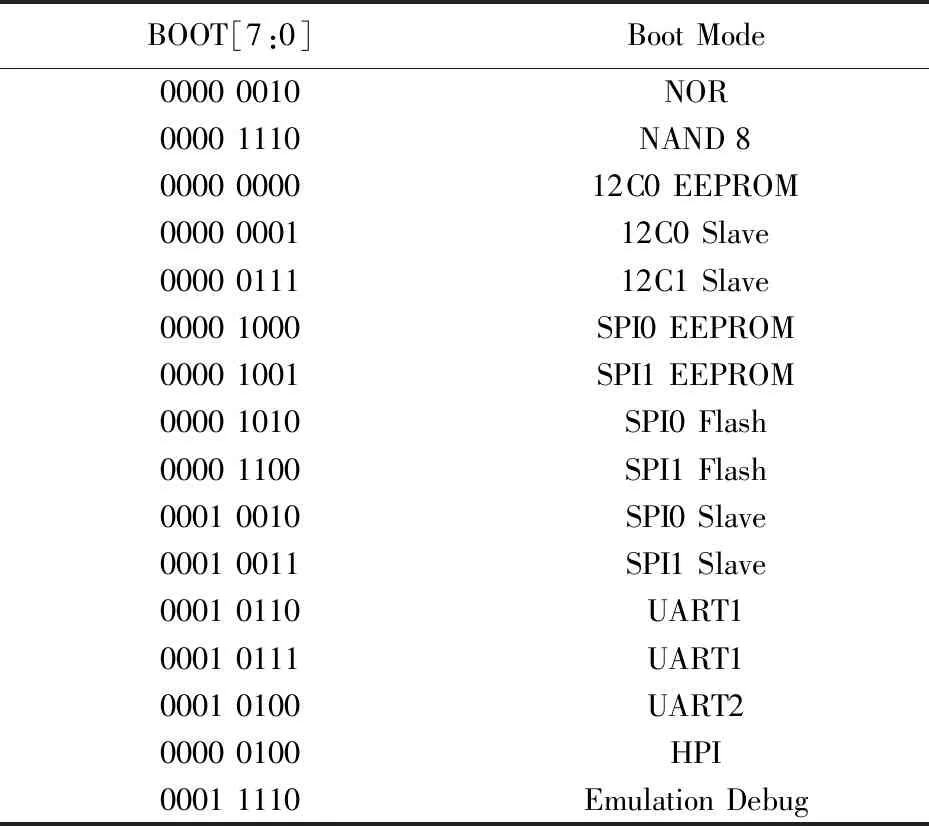
表1 TMS320C6748启动模式Tab.1 TMS320C6748 boot mode
TMS320C6748上电复位后,首先确定启动模式是否为NandFlash,即Boot[7:0]=0000 1110,随后查询AIS文件中的魔术子指令(0x41504954)、初始化配置指令(0x5853590D)、段加载指令(0x58535901)、Jump&Close指令(0x58535906)、Jump&Close指令(0X58535906)后紧跟应用程序起始地址,其代表AIS文件结束,随后Bootloader将控制权转交到应用程序并在起始地址开始执行.
3 系统软件设计
3.1 NandFlash的分区与读写时序
NandFlash被划分为3部分,如图3 所示,能被DSP识别的应用程序生成的AIS脚本文件存储在Block1中,随时可能需要修改的参数装载到Nandflash的参数装订区,数据量较大的导航解算数据存储在后面剩余的非坏块中.


图3 NandFlash分区示意图Fig.3 NandFlash partition diagram

图4 TMS320C6748对K9K8G08U0M的读时序Fig.4 TMS320C6748 read timing for K9K8G08U0M
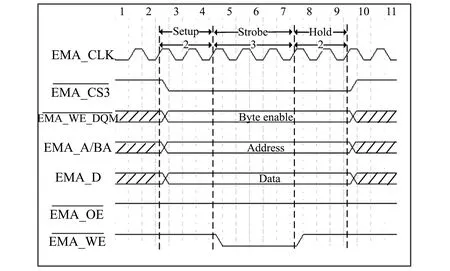
图5 TMS320C6748对K9K8G08U0M的写时序Fig.5 TMS320C6748 write timing for K9K8G08U0M
3.2 DSP功能程序烧写与参数装订原理
系统上电启动后,DSP启动复位,在CCS5.5运行NandFlash烧写程序,首先执行块擦除命令(0x60+0xD0)擦除整片NandFlash,然后将用户应用程序生成的AIS文件写入NandFlash AIS存储区,该程序此后不做修改.外场试验参数确定后,进行外场参数装订,执行数据存储区擦除命令,即首先写入数据存储区首地址,然后执行擦除命令,其具体工作流程如图6 所示.
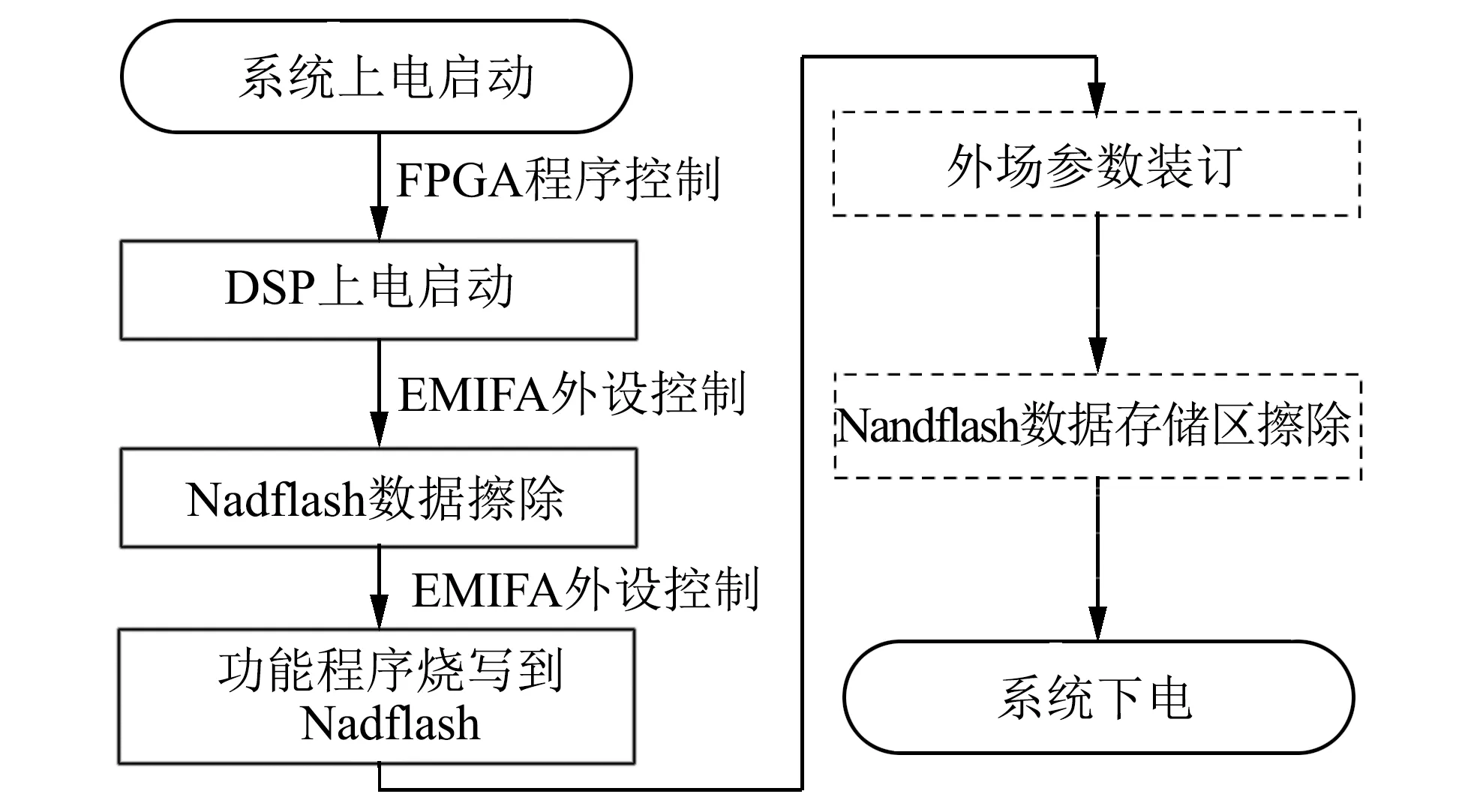
图6 AIS烧写与参数装订流程图Fig.6 AIS programming and parameter binding flow chart
3.3 系统总体功能运行流程图
系统外场试验参数装订完毕后,通过系统预留串口将读取到的参数发送到上位机进行校对,若系统收到参数错误指令,则需重新装订,若系统收到参数正确指令,则系统进行后续导航解算,其具体工作流程如图7 所示.

图7 系统总体工作流程图Fig.7 System overall work flow chart
4 实验结果
为了验证设计方案的可行性,将系统固定在装有高精度定位定姿系统的试验车上进行地面验证试验.首先将中北大学位置信息和重力加速度等信息装载到NandFlash参数装订区,擦除数据存储区,系统下电.系统再次上电,DSP正常启动后通过串口(UART2)将读取的参数发送到上位机解码,显示结果如图8所示,读取参数值与预设参数一致,说明DSP能正确进行程序引导,同时也说明参数装订正确,点击参数装订正确指令,系统收到应答指令后开始周期导航解算.

图8 参数装订上位机显示界面Fig.8 Parameter binding upper computer display interface
FPGA将IMU,GPS数据编帧后通过UPP传输到DSP进行解算,此后在DSP中与导航解算数据一起编帧存储到NandFlash数据存储区.试验结束后,读取导航数据存储区数据,进行数据解析得到导航解算姿态角、速度,图9、图10 分别为系统解算得到的姿态角、速度信息与高精度母惯导输出的对比图.

图9 姿态角对比图Fig.9 Attitude angle comparison chart
由图9、图10 可知,解算数据能正常存储.说明基于DSP的NandFlash程序引导、参数装订、数据存储功能正常.

图10 速度对比图Fig.10 Speed comparison chart
5 结 论
本文针对外场试验环境的复杂性以及弹载导航解算平台的小体积与大容量应用需求,设计了一种基于DSP控制NandFlash的多功能存储方案,该方案利用一块NandFlash同时完成了程序引导、外场参数装订、数据存储等功能,减小了系统的体积,提高了NandFlash的使用效率,增强了系统可靠性和便利性.