大视场航空相机光学系统设计
2019-12-13刘海英朱海滨孙洪宇姜彦名赵汉卿
刘海英,王 跃,王 英,朱海滨,孙洪宇,姜彦名,赵汉卿
(吉林东光精密机械厂,吉林 长春 130103)
引言
航空侦察作为一种侦察手段,自产生以来一直是军事侦察领域的重要组成部分,设计高分辨率、大视场侦察相机已经成为航空侦察相机技术发展的必然趋势。然而图像传感器的尺寸却受到工艺的限制不可能做得很大,所以图像传感器的尺寸已成为限制相机视场的主要因素。视场拼接技术是解决大视场问题的关键。目前视场拼接主要有成像器件机械拼接、多镜头多面阵拼接和单镜头多面阵拼接。成像器件机械拼接就是在像面上将多片图像传感器紧密的排列起来,机械拼接的优点在于采用机械拼接的相机光学系统相对比较简单,缺点是成像元器件成品都有封装结构,具有一定的几何尺寸,实际像元大于有效像元,因此直接将2个成像芯片拼在一起中间会产生缝隙,在成像时产生拍摄盲区,丢失图像信息。为了实现无缝拼接,传统方法是拆除单个成像芯片封装,将有效像元顺次拼接,但这种方法工艺复杂,成本高,很少被采用。多镜头多面阵成像器件拼接是每片成像芯片,使用一套独立的光学系统,通过物理“捆绑”构成具有较大成像面积的等效相机系统,其优点是实现简单,缺点是结构庞大。单镜头多面阵成像器件拼接是多片成像器件使用同一套镜头,由多面阵成像芯片共同构成焦平面,因此光学系统较为复杂,对各面阵成像芯片的安装精度要求非常高,成像器件片数越多,装调困难较大,光学系统像质还要受多种因素的影响而降低。因此在设计时,要求光学系统的像质尽可能达到或接近衍射极限,还要考虑环境温度、气压、高度等因素的变化对光学系统的影响,在设计时应采取相应的措施消除或减弱对像质的影响。
1 光学系统设计
1.1 光学系统设计指标
光学系统设计指标如下:
照度范围: 4 000 lx ~ 100 000 lx;
光谱范围: 0.48 μm~0.75 μm;
探测器靶面尺寸:36.168 mm×24.112 mm;
像元尺寸:5.5 μm;
组合视场:20.5°×6.9°;
相对孔径:1∶4;
全视场最大畸变:<0.5‰;
光学系统传递函数:MTF≥0.5(全视场)。
1.2 焦距的确定
光学系统焦距长短要根据地面分辨率指标要求确定。垂直型航空相机地面分辨率指标RG、航拍高度H、选用的CCD芯片像元尺寸d及焦距之间的关系可根据下式确定:
(1)
式中:f′为相机焦距;RG为地面分辨率;n为像元数;H为飞行高度;d为像元尺寸。
依据产品装调水平、系统使用环境及设计经验,一般n在1.5~3之间选择。
从公式(1)可以看出,相机地面分辨率与镜头焦距、像元尺寸、像元数有关。增大镜头焦距,相机重量随之增加;而减小像元尺寸会导致成像灵敏度降低,因此确定系统焦距时,应根据系统技术指标及使用条件综合考虑。
1.3 视场角的确定
光学系统视场角的大小由物镜焦距和接收器件的尺寸决定。单片成像芯片成像不满足视场角要求,为了扩大视场,采用双片成像器件进行拼接。视场角计算公式为
(2)
式中:ω为半视场角;y′为CCD器件1/2尺寸;f′为镜头焦距。
光学系统成像组件拼接视场示意图如图1所示,拼接后的视场角可以增加近1倍。单片成像芯片视场10.36°×6.9°,双片成像芯片拼接后的视场20.5°×6.9°。

图1 拼接视场示意图Fig.1 Schematic diagram of splicing field
1.4 光学组件结构形式
光学组件由窗口玻璃、地物反射镜、摄影物镜、像方反射镜、分光棱镜、像面等组成。为减小相机外形尺寸,反射镜采用折叠光路,最后一片透镜用于内调焦。采用双高斯准对称结构形式校正轴外像差,如彗差、垂轴色差、畸变等,用厚透镜校正像散、场曲。为了避免胶合镜在胶合过程中对面型的影响,设计中将胶合镜分离为单透镜,这样有利于成像质量的提高,并且减少了胶合工序。单透镜材料选用折射率较高、色散较小、工艺性较好的玻璃。在满足系统校正轴外像差要求的同时,很好地校正了系统的带球差、二级光谱、位置色差等,保证轴上点和轴外点没有太大的差别,使整个视场内成像质量比较均匀,以利于提高整个系统的成像质量。
光学系统结构形式如图2所示。地面景物光线通过光学窗口、地物反射镜进入成像物镜,再通过折叠光路的像方反射镜及分光镜分别成像在大面阵CCD1靶面和CCD2靶面上,通过光学拼接形成一幅拼接图像,从而扩大视场。通过光电转换,实时获取图像信息。

图2 光学结构图Fig.2 Structure diagram of optical system
2 光学系统3种工作模式
通过地物反射镜的3种工作模式,实现光学系统垂直照相、自动对焦及像移补偿功能。
2.1 垂直拍照模式
如图2所示,地物反射镜位于位置Ⅰ时,地物反射镜与光轴成45°放置。此工作模式用于相机垂直拍照。相机可在此模式下,完成航空拍照,并将图像存储在记录器中或实时传至地面控制站,供图像判读使用。
2.2 基于图像处理的自准值自动对焦模式
如图2所示,地物反射镜位于位置Ⅱ时,地物反射镜与光轴成90°放置,此工作模式用于相机自动对焦。航空照相,由于温度、大气压力和照相距离等环境因素变化的影响,会造成相机焦面位置前后移动,产生离焦。离焦使像点在成像模块上形成弥散圈,造成影像模糊,分辨率下降。本光学系统采用基于图像处理的自准值自动调焦方法,自动调焦原理如图3所示。

图3 自准直自动对焦原理图Fig.3 Schematic diagram of auto-collimation and auto-focusing
鉴别率板与成像模块光敏面共面,且垂直于光轴,内置分辨率板图像,光线通过相机物镜后,经过反射镜反射回来,再次经过相机物镜,成像在成像模块光敏面上,由控制系统对成像模块接收到的数字图像,计算清晰度函数,控制系统内调焦透镜向前后移动,直至清晰度函数值最大,将物镜离焦量控制到最小。最后,根据高度信息对由拍摄距离变化引起的离焦量加以修正。这种调焦方式可以修正大气压力、温度等变化及冲击、振动引起的结构变形等因素引起的离焦,通过调节内调焦镜的位置,使外景在成像模块感光面上清晰成像。
2.3 像移补偿模式
如图2所示,地物反射镜位于位置Ⅲ时,通过控制地物反射镜旋转方向和旋转角速度实现航空拍照像移补偿。利用旋转反射镜进行像移补偿的基本原理如图4图所示。
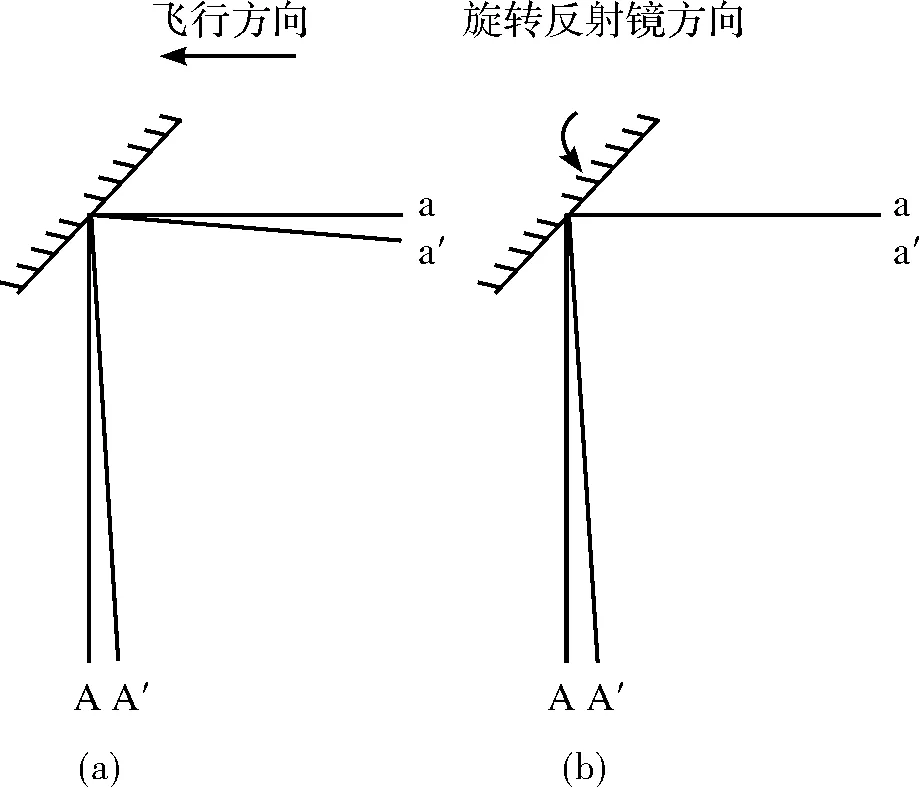
图4 像移补偿原理Fig.4 Schematic diagram of forward image motion compensation
图4(a)中A点经反射镜及镜头成像在a,在相机曝光时间内,由于飞行的运动,景物A相对于飞机运动到了A′,像点运动到了a′,造成了影像位移。如果在快门曝光的同时,旋转反射镜,只要反射镜转动的角速度适当,则可以使像点a相对静止不动。反射镜旋转方向如图4(b),当反射镜旋转使像点产生的补偿速度(VIMC)大小等于像移速度而方向与之相反时,即影像静止不动,从而达到像移补偿的目的。
3 物镜设计结果
物镜设计结果如图5~图9所示。

图5 系统MTFFig.5 FFT MTF
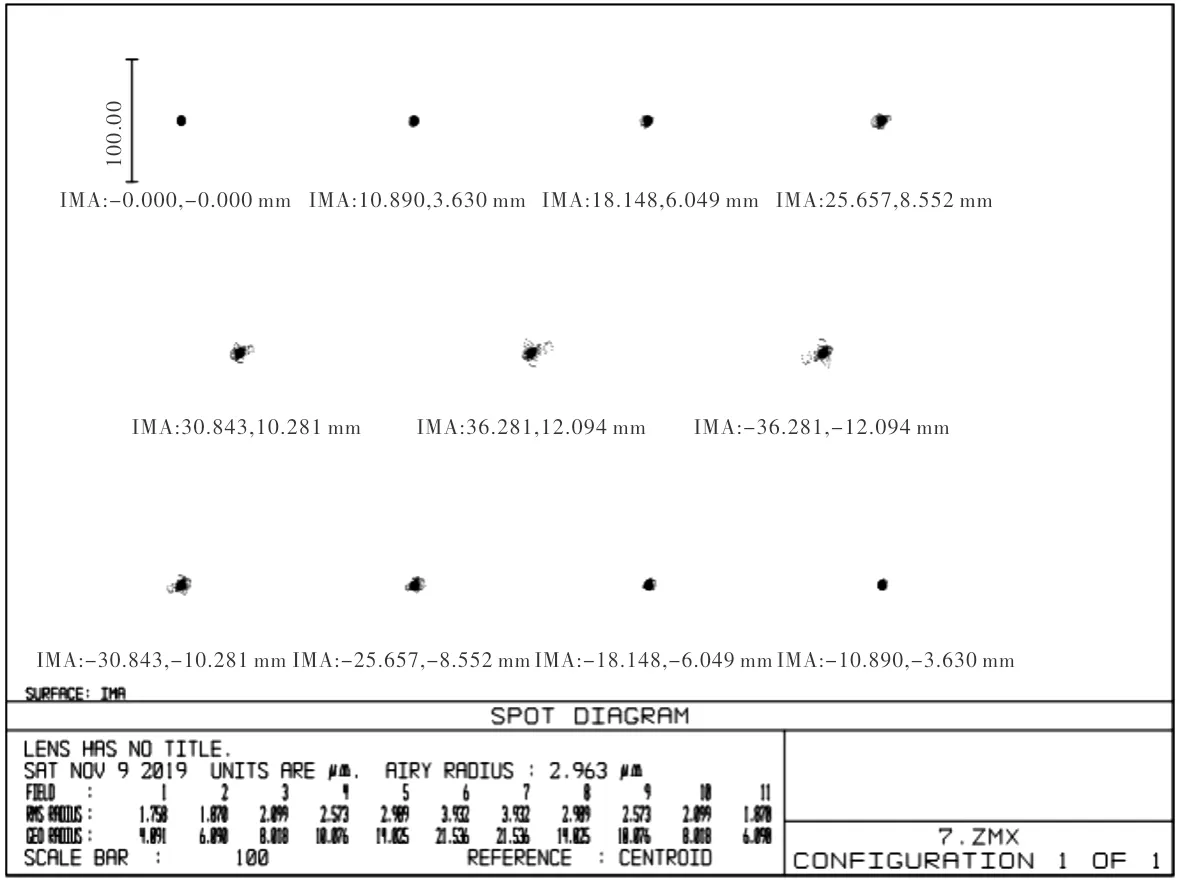
图6 点列图Fig.6 Spot diagram

图7 全视场MTFFig.7 Full field of view MTF
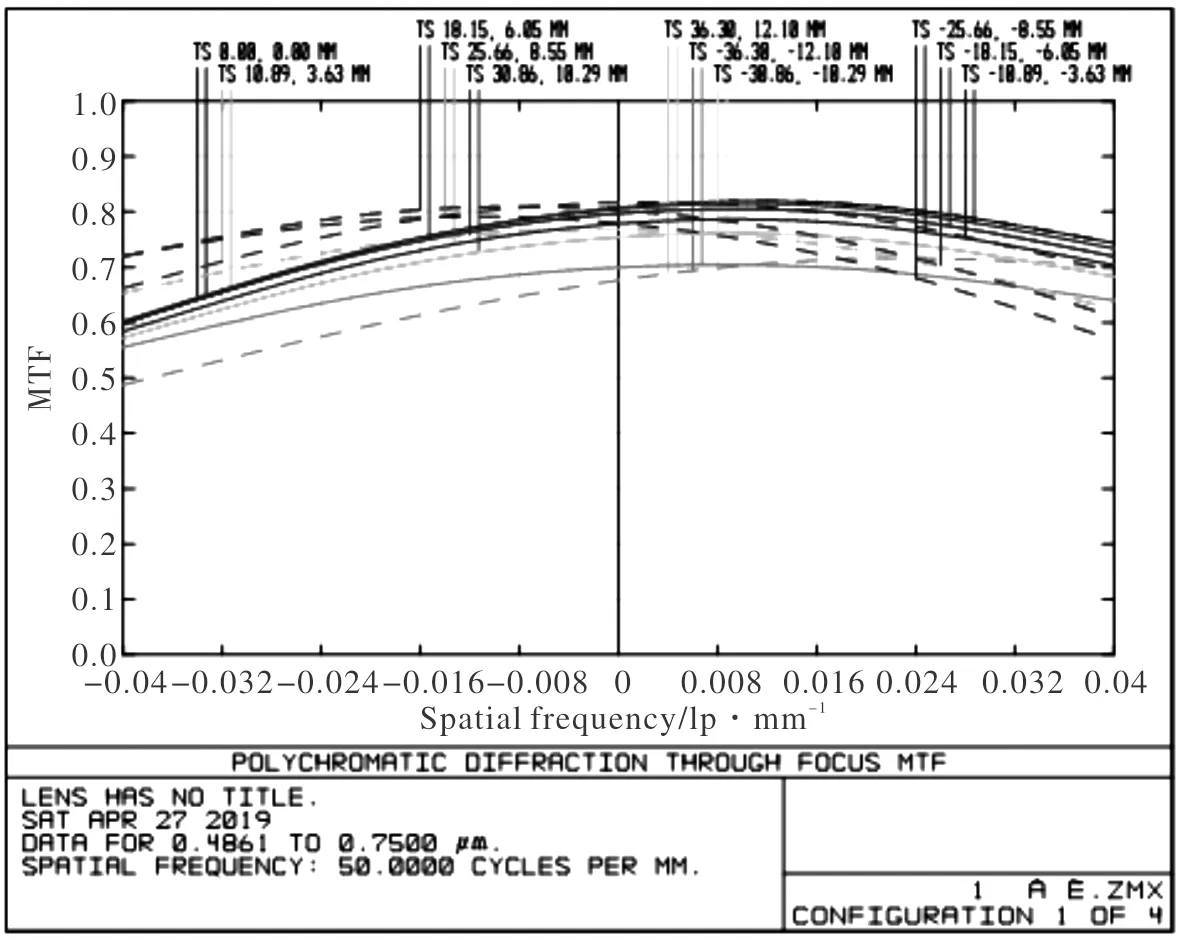
图8 离焦MTFFig.8 Off-focus MTF
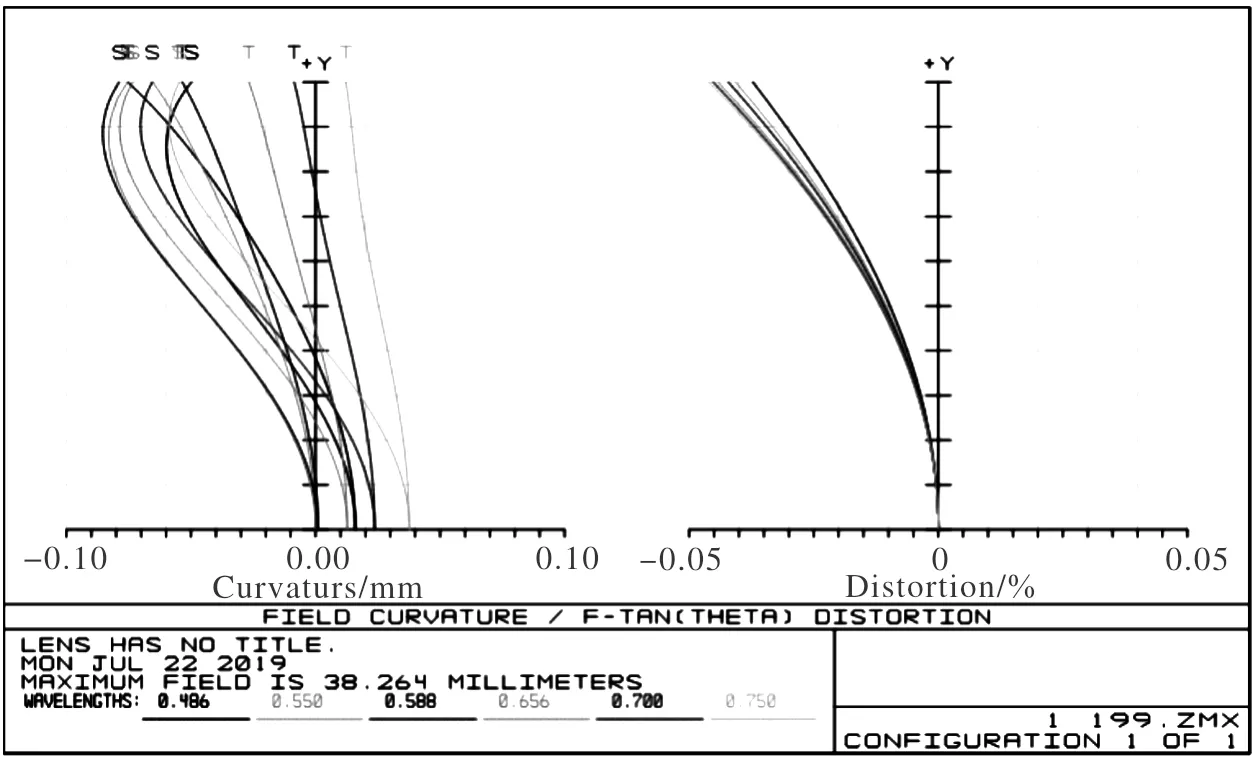
图9 场曲和畸变Fig.9 Field curvature and distortion
由图5数据可以得出:衍射极限MTF=0.703 6(91 lp/mm),视场中心MTF=0.663,全视场MTF=0.576。
由图6数据可以得出:艾里斑直径为5.98 μm,设计结果中点列图0.7ω内RMS均小于艾里斑直径,1ω小于1个像素,成像质量较好。
由图7设计数据得出:物镜在全视场范围内成像质量一致。由图8设计数据得出:镜头在最佳焦面前后离焦±0.04 mm时,MTF在0.5以上,说明MTF在最佳焦面前后变化很缓慢,设计结果有利于镜头装配调试,环境适应性大。
由图9数据可以得出:全视场最大畸变<0.5‰,满足指标要求。
从上述曲线和数据可以看出,镜头中心光学传递函数值与镜头的衍射极限传递函数值比较接近,子午视场和弧矢视场的光学传递函数基本吻合,整个视场内成像质量比较均匀,系统成像质量好。由设计结果可知,设计的摄影物镜MTF≥0.5(全视场),满足设计技术指标要求。
4 系统消热差设计
光学系统在-40℃~+60℃温度范围内工作,如此大的温度变化会导致系统内部光学镜片的厚度、间隔、曲率半径以及光学材料的折射率发生改变。这些结构参数的改变会导致光学系统的焦点随温度、气压变化漂移,严重影响成像性能。为了使系统的环境适应性更好,本系统采用一种全新的基于图像处理的自准直自动对焦方法,进行系统的消热差。
自准直自动对焦原理图如图3所示。每次照相前,相机自动对焦伺服系统首先要进行校准,以便确定相机开始照相之前相机的焦距。这时的相机焦距不同于相机所标定的焦距,相机标定的焦距是相机出厂时在规定的环境条件下(即一定的大气压力和环境温度)测得的,而照相前由于相机的环境条件改变,所以焦距不同。这种校准叫做对无穷远调焦。校准时,反射镜与相机镜头的主光轴垂直,同时自动对焦灯照亮光栅标板,光栅标板的影像通过镜头再由反射镜反射到光电聚焦传感器上,通过对拍摄到的反射镜返回图像进行分析处理,计算清晰度函数后获取离焦信息,然后将离焦信息提供给控制系统。控制系统控制伺服电机驱动调焦机构调整内调焦镜位置对相机进行调焦,再次拍摄图像以检查调焦结果,直到调至最佳焦面位置,从而实现自动对焦。

图10 自动调焦MTF(航高5 000 m,温度-17.5℃ ,气压0.53 Pa)Fig.10 Automatic focusing MTF(altitude of 5 000 m, temperature of -17.5℃, air pressure of 0.53 Pa)
与传统自准直调焦系统相比,其优点为:以CCD器件自身作传感器,直接闭环测控,调焦精度高;不需增加额外的测试手段,有利于减小系统体积和质量,提高可靠性,适应性强,与其他调焦方法相比更适合航空相机实现自动对焦。图10和图11为不同条件下自动调焦MTF。
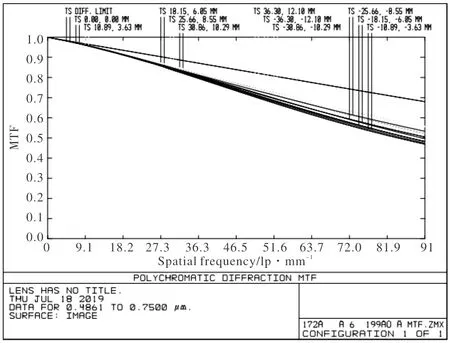
图11 自动调焦MTF(航高 8 000 m,温度-37.5℃ ,气压0.35 Pa)Fig.11 Automatic focusing MTF(altitude of 8 000 m, temperature of -37.5℃, air pressure of 0.35 Pa)
5 拍摄效果
利用该光学系统设计的航空相机进行实验室动态检测及航拍试验,测试指标满足技术指标要求。图12为实测物镜MTF,图13为试验室内测试动态分辨率靶标图。测试条件为模拟飞机航高6 000 m,航速为700 km/h的运动。图14为外景航拍试验靶标图,测试条件为飞机飞行高度为3 044 m,飞行速度为387 km/h。

图12 实测物镜MTFFig.12 Measured objective MTF

图13 试验室内测试动态分辨率靶标图 Fig.13 Dynamic resolution target map for laboratory testing

图14 外景航拍试验靶标测试图Fig.14 Testing chart of target for exterior aerial photography test
6 结论
大视场航空相机光学系统,采用双高斯准对称结构形式,通过双成像模块光学拼接扩大视场角,调整最后一片透镜实现内置自动调焦,控制地物反射镜实现垂直照相、自动调焦及前向像移补偿3种功能模式的转换。该光学系统实现了全视场无渐晕,在91 lp/mm处MTF接近衍射极限,物镜在全视场范围内成像质量一致。通过实验室及室外航拍试验验证,该光学系统满足设计指标要求。
